大型阵列式太阳能热发电定日镜跟踪系统设计
2016-03-03 08:18刘立群张国梁
太原科技大学学报 2016年1期
田 行,刘立群,葛 竹,曹 伟,张国梁
(太原科技大学电子信息工程学院,太原 030024)
大型阵列式太阳能热发电定日镜跟踪系统设计
田行,刘立群,葛竹,曹伟,张国梁
(太原科技大学电子信息工程学院,太原 030024)
摘要:为了有效提高太阳能塔式发电系统的发电效率,采用视日运行轨迹跟踪和光电跟踪相结合的方案,设计了双轴定日镜跟踪装置。首先介绍了时角和赤纬角以及太阳高度角和方位角的计算公式,进而推导出了定日镜的高位角和方位角计算方程,并以此为依据设计了一种基于太阳位置算法的双轴跟踪控制系统。理论分析与实验结果表明,该装置能够准确跟踪太阳,并且能有效提高太阳能的利用率。
关键词:太阳能;塔式定日镜;单片机;光电跟踪
太阳能塔式热发电系统的工作原理是利用一定数量的定日镜,将太阳入射光线反射到高塔顶部的高温集热器上,通过能使机械能和热能相互转化的媒介物质产生高温蒸汽,给汽轮发电机组提供发电所需的动力,进而将太阳能转化为电能[1-2]。在塔式热发电系统的技术指标中,定日镜的跟踪精度是最关键的参数之一,直接影响到系统的发电效率[3]。本文设计搭建一种定日镜跟踪装置,采用视日运行轨迹跟踪和光电跟踪相结合的方案,使定日镜可以精确的对准太阳,从而有效提高太阳能的利用率。
1太阳位置的确定方法
定日镜的聚光精度直接关系到产能效率,而太阳相对于观测地点的位置是可以通过算法计算得到的。因此,精确的计算太阳在任意时刻的位置是视日运行轨迹跟踪的前提。目前应用较广的是通过太阳的高度角和方位角信息来描述太阳的实时位置。在计算高度角和方位角的过程中,赤纬角和时角直接关系到最终计算数值的精度[4-5]。根据本文采用的计算方法,太阳各个角度之间的关系示意图如图1所示。
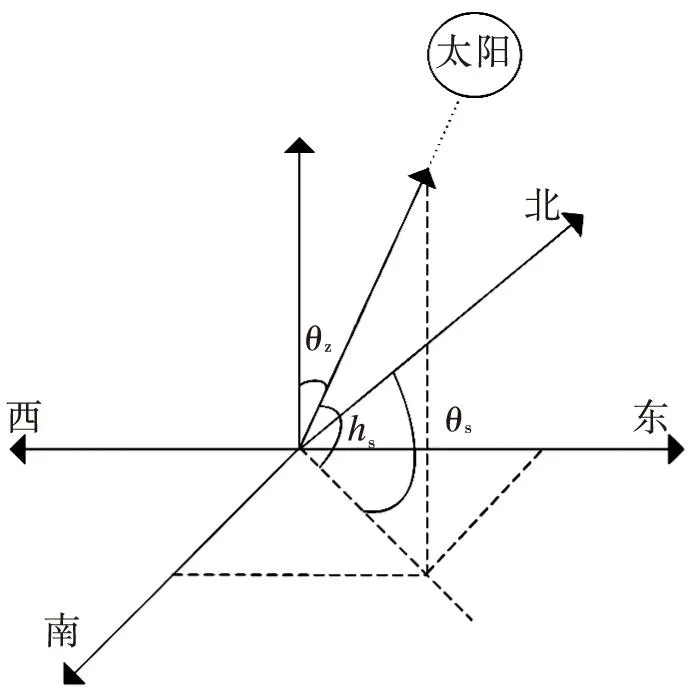
图1 太阳高度角-方位角示意图
图1中高度角为hs;方位角为θs;天顶角为θz.目前,赤纬角δ和时角ω的计算方法有很多,较为简便且精度较高的计算方法如下所示:
对于太阳赤纬角多采用近似计算公式为(1),时角的计算公式为(2),其中n为一年中日期序号。
(1)
(2)
e=9.87sin2B-7.53cosB-1.5sinB
(3)
(4)
在求出赤纬角和时角之后,太阳高度角和方位角即可得出。相对于参考地点而言,太阳的位置既可以用高度角和方位角表述,又可以用天顶角和方位角进行表述。由两者的定义可知,天顶角和太阳高度角是成余角关系的,如公式(5)所示:
θz+hs=90°
(5)
另外,将参考地点与太阳在地面上的投影相连,其所在直线与参考地点正北方向的夹角即为太阳方位角θs.
根据以上介绍,太阳高度角和天顶角与参考地点纬度、赤纬角和时角的关系如式(6)所示:
sinhs=cosθz=sinφsinδ+cosφcosδcosω
(6)
方位角与高度角、纬度、赤纬角以及时角的关系可表示为:
(7)
其中,δ为太阳赤纬角,φ为当地的纬度,ω为太阳时角。
若太阳日出和日落时刻的高度角为0°,则依据日出和日落时的时角计算公式ωs=arccos(-tanφtanδ),可以推导出:
ωsr=-ωs
(8)
ωss=ωs
(9)
因此,全天的日照时间可以表述为式(10):

(10)
由于地球公转导致参考地点日出和日落时刻的太阳方位角随着日期呈周期性变化,这种变化与参考地点的纬度和每天的赤纬角有关。日出日落方位角γs,0的计算公式:
cosγs,0=-sinδ/cosφ
(11)
由公式(11)即可求出日出日落时刻的方位角,并且我国处于北纬0°到66.5°的范围内,则在夏半年赤纬角均大于0°,在冬半年赤纬角均小于0°,相应的日出日落方位角也随之变化。
2定日镜跟踪控制系统设计
2.1 定日镜角度计算
定日镜是塔式太阳能热发电站的主要装置之一,也是塔式太阳能热发电站主要的投资部分。定日镜主要是由镜面、支撑结构、驱动机构以及控制系统等部分组成,其主要作用是跟踪太阳光线,并将太阳光反射到位于高塔顶部的接收装置上[6-8]。
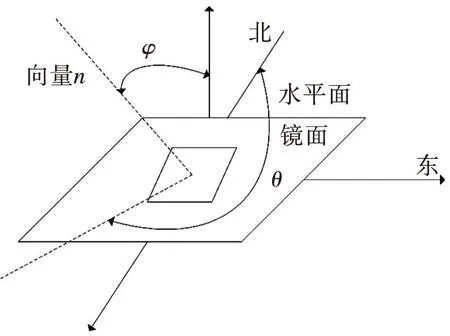
图2 定日镜角度示意图
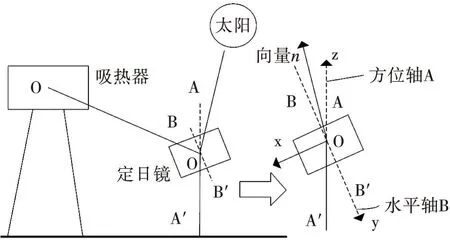
图3 定日镜坐标定义

本文通过建立三维坐标系对定日镜跟踪原理进行研究,如图3所示,图中的射线A为z轴,射线B为y轴。在初始时刻,规定定日镜镜面水平,正北朝向,则φ=0,θ=0.
(12)
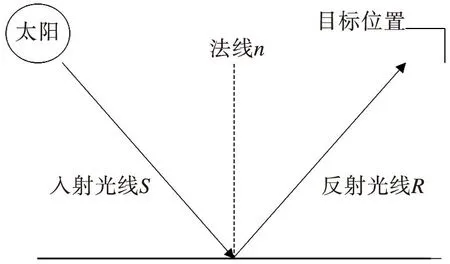
图4 反射原理示意图
(13)

设定日镜镜面中心点O点坐标为(xo,yo,zo),聚光塔接收面中心点M点坐标为(xm,ym,zm),则反射单位向量为:
(14)
结合图1,若太阳该时刻高度角为hs,方位角为θs,则此时太阳光入射单位向量为:

(15)
结合公式(12),可得公式(16):
(16)
在求出某时刻太阳高度角hs和方位角θs后,由式(16)即可求出定日镜双轴跟踪装置两个维度的调整角度,从而实时的实现定日镜的精确定位。
2.2 定日镜跟踪策略
本文采用光电跟踪与视日运动轨迹跟踪相结合的跟踪控制方式对太阳在空中的实时位置进行跟踪。对于视日运动轨迹跟踪,本文选用高度角和方位角双轴跟踪方式。定日镜控制器由单片机最小系统、数据采集模块、光电跟踪电路、和电机驱动电路等组成。
控制系统工作时,首先进行初始化操作,然后通过读取时间判断系统是否在工作时间范围内。如果系统检测到在工作时间范围内,系统首先采用视日运动轨迹跟踪,调整定日镜的位置。然后通过光强检测电路对太阳光线的强度进行判断,当太阳的光照强度的达到光电跟踪的阀值时,此时系统采用光电跟踪方式代替视日运行轨迹跟踪;如果未达到光电跟踪的光强要求时,系统则继续采用视日运动轨迹跟踪方式。另外,在光电跟踪过程中,如果有阴云遮蔽的情况遮,跟踪装置通过光强检测装置,将系统的跟踪模式切换回视日运动轨迹跟踪,继续对太阳进行跟踪;当云层消失后,再次达到光电跟踪的光强要求时,系统又会从视日运动轨迹法跟踪切换到光电跟踪方式,对太阳进行跟踪。
3跟踪系统硬件设计
定日镜跟踪装置的硬件设计原理图如图5所示[9]。
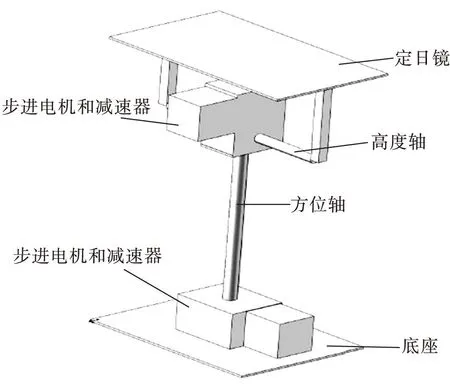
图5 系统机械结构图
本文涉及的硬件装置具体选型过程如下:
1)本系统选用57BYGH56型号的步进电机。这是一种57式的两相混合式步进电机,其显著的特点是工作温度范围较广,在精度满足设计要求的同时还方便加入旋转编码器实现闭环控制,有效保证了系统的跟踪精度。 57BYGH56电机的详细参数如表1所示:

表1 57BYGH56电机参数
2)涡轮蜗杆减速器。本文选用涡轮蜗杆减速器作为跟踪系统的减速装置,一方面是因为减速器可以增大系统的传动扭矩;另一方面,主要是利用涡轮蜗杆减速器的反向自锁功能。由于跟踪装置的频繁启动必然会导致跟踪系统耗能的增加,因此在跟踪间歇阶段,涡轮蜗杆减速器可以凭借其反向自锁功能使电机在不耗电的情况下保持当前位置不变。但是,如果减速倍数较小,则减速器的反向自锁功能会不理想,甚至无法实现自锁;而减速比过大又会导致传动效率的下降,通过实验分析,本文选择50倍速比的涡轮蜗杆减速器。
3)选用带有细分功能的步进电机驱动器。本文选用的驱动器为18细分,电机的额定电流时3 A,细分之后电机动作所需电流仅为0.167 A,避免了电机启动瞬时尖峰电流对电路的损坏。实际运行表明,加入带细分功能的驱动器后,一方面提高了系统的跟踪精度;另一方面有效降低了装置的震动。
4)光电检测电路由光敏二极管和运算放大器LM393芯片组成,共有两对、四组,分布于光电检测装置的上下左右四个方位,用于高度角和方位角的微调。
5)选用Atmega16作为主控制器。Atmega16单片机是一种采用精简指令集的8位单片机,处理速度相比于51单片机具有明显的优势。并且通过其内部的定时计数器即可产生占空比可调的方波信号,方便用于对电机的控制。
6)系统的时钟芯片选用DS1302,该芯片通过编程其内部的寄存器可以准确计时到秒,编程简单且易于实现。
4仿真和实验结果
4.1 电路与太阳运行轨迹仿真
本文首先选用Protues仿真软件对本文的基本控制电路进行了设计搭建,将编写完成的程序输入单片机,电机驱动电路选用ULN2003达林顿管。驱动电路的主要目的是将弱电转换成强电,提高电机的驱动电流及驱动电压。电机驱动脉冲时序由单片机引脚提供。
图6为2014年10月25日的太阳角度变化曲线,可见太阳的高度角和方位角在一天中的变化速率是不同的。并且通过多次仿真发现,不同日期下的太阳运行轨迹变化较大,这与太阳在天球坐标系中的位置变化有关。在10点至13点之间时,当日的太阳高度角变化呈现出先变大后减小的趋势,其余时间段内太阳的高度角变化近似是匀速的。而方位角从当天的日出时刻开始基本近似为匀速运动,直至日落。
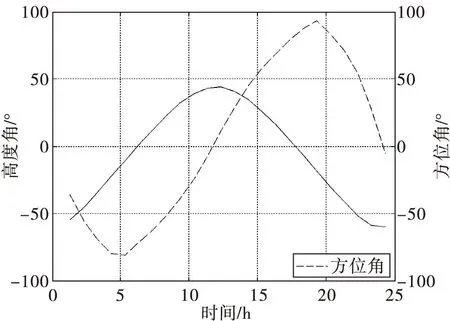
图6 高度角-方位角变化曲线
4.2 装置实验结果
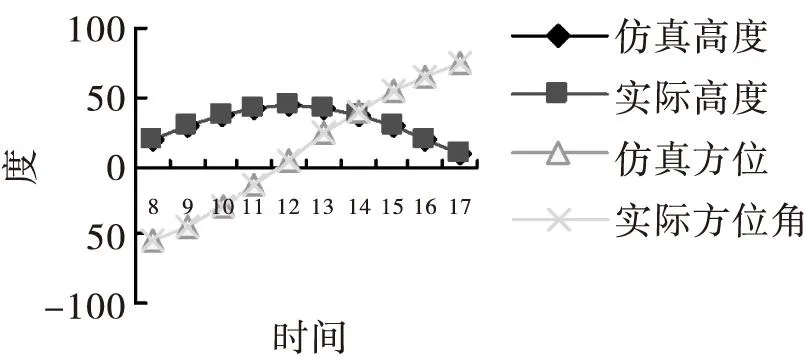
图7 太阳运行轨迹仿真结果与实际跟踪值对比
实验过程中,首先将太阳运行轨迹公式输入单片机,然后在单片机程序中设置实验当天的日期以及测试地点的经纬度信息。在Matlab仿真软件环境下运行视日运行轨迹跟踪程序,从而得到一天内太阳运行的理论角度,与编码器测量的实际角度作对比,从而验证了跟踪装置的跟踪精度。图7是对整点时刻跟踪装置运行角度的测量数值,其与太阳运行实际位置的角度差值均在0.7°以内。实际上,经过大量的实验测量,本文设计的跟踪装置角度误差也均在这一数值以内,因此定日镜跟踪系统的跟踪精度为±1°是切实可信的。
5结论
本文首先设计和搭建了双轴定日镜跟踪装置,并以此装置为基础,在考虑阴云遮蔽的情况下,采用视日运行轨迹跟踪和光电跟踪相结合的方案,对太阳进行实时的精确跟踪。仿真与实验结果表明,塔式定日镜跟踪控制装置的跟踪精度切实可靠,跟踪控制方案有效可行。此外,本文的定日镜跟踪装置设计简单、合理、跟踪精度高,可以有效提高太阳能发电系统的产能效率。
参考文献:
[1]刘化果.高性能塔式太阳能定日镜控制系统研究[D].济南:济南大学,2010.
[2]张宏丽,王志峰.塔式电站定日镜场布置范围的理论分析[J].太阳能学报,2011(1):89-94.
[3]许芬.塔式太阳能定日镜聚光成像建模及仿真[J].太阳能学报,2010(10):1304-1310.
[4]于少娟,刘立群,贾燕冰.新能源开发与应用[M].北京:电子工业出版社,2014:12-21.
[5]LIU L Q,HAN X Q,LIU C X,et al,The influence factors analysis of the best orientation relative to the sun for dual-axis sun tracking system[J].Journal of Vibration and Control,2015,21:328-334.
[6]姚梦凯.塔式太阳能定日镜聚光成像策略研究与控制系统设计[D].杭州:浙江大学,2012.
[7]郭铁铮,刘德有,钱艳平,等.塔式太阳能热发电站中的定日镜跟踪装置研制[J].中国电机工程学报,2008,35:114-119.
[8]孙飞虎,郭明焕,白凤武,等.定日镜跟踪纠偏策略综合应用研究[J].太阳能学报,2014(7):1272-1279.
[9]陈建彬,沈惠平,丁磊,等.两自由度太阳能跟踪系统设计[J].机械设计与制造,2010(8):264-266.
Heliostat Tracking System Design for Large-array Type Solar Thermal Power Generation
TIAN Xing,LIU Li-qun,GE Zhu,CAO Wei,ZHANG Guo-liang
(School of Electronic Information Engineering,Taiyuan University of Science and Technology,
Taiyuan 030024,China)
Abstract:In order to effectively improve the efficiency of the solar tower power generation system, the two-axis heliostat tracking device is designed by using visual Sun trajectory tracking combined with photoelectric tracking scheme.The sun time angle,declination angle,solar altitude angle and azimuth angle,are introduced to deduce the altitude angle and azimuth angle of heliostats, and a two-axis tracking control system is designed,which is based on the solar position algorithm.The analysis and research results show that the device can accurately tracking the sun and can effectively improve the utilization rate of solar energy.
Key words:solar energy,tower heliostat,single-chip microcomputer,photoelectric tracking
中图分类号:TP202
文献标志码:A
doi:10.3969/j.issn.1673-2057.2016.01.006
文章编号:1673-2057(2016)01-0027-05
作者简介:田行(1990-),男,硕士,主要研究方向为光伏发电系统;通讯作者:刘立群,教授,E-mail:llqd2004@163.com
基金项目:山西省大学生创新创业训练项目(2013246);山西省软科学研究计划项目(2014041021-3)
收稿日期:2015-05-21
猜你喜欢
华人时刊(2021年15期)2021-11-27
中学生天地·高中学习版(2020年3期)2020-04-10
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
电子制作(2018年12期)2018-08-01
小哥白尼(趣味科学)(2018年4期)2018-06-21
电子制作(2017年19期)2017-02-02
少儿科学周刊·儿童版(2015年7期)2015-11-24