
唐山LNG终端船舶操纵模拟试验
2016-03-01 07:06张鹏飞
水运管理 2015年12期


【摘 要】 为对在液化天然气(LNG)终端投产运营前须进行的船舶操纵模拟试验(FMBS)有清晰的认识,通过对FMBS实施流程和关键控制点的分析,结合唐山LNG终端码头及附近水域实际情况,设计模拟试验方案。结果表明,模拟试验结果对实际操船有一定的指导作用。归纳船舶操纵要点,进一步保证LNG船舶靠离泊码头的安全。
【关键词】 船舶操纵模拟试验(FMBS);液化天然气(LNG)船舶;靠泊;离泊
1 船舶操纵模拟试验(FMBS)概述
1.1 FMBS的目的
按照国际行业惯例,试运投产、装(卸)液化天然气(LNG)首船的LNG终端须完成由船舶所有人和(或)租船方、货主等代表参加的FMBS。 FMBS的顺利完成,为下一步进行船岸界面匹配和尽职调查奠定了基础。
为确保大型LNG船舶(Q-Flex/Q-Max船型)进出港及靠离泊安全,拟通过对船舶在不同工况(风、浪、流等)环境下的操纵模拟试验,了解在各种环境条件下船舶进出港及靠离泊安全情况,并据此制订科学的进出港及靠离泊方案。FMBS对指导船舶安全靠离码头具有重要意义,是LNG终端试运投产前的重要环节。
FMBS目的是为了对Q-Flex/Q-Max船型在码头各种工况下靠离泊的模拟验证,分析影响船舶安全航行及靠离泊的不利因素,提出靠离泊安全作业条件。
1.2 FMBS的实施流程
唐山LNG终端试运投产前的FMBS由当地引航员主持,拖船船长根据港址相关气象水文资料,以及引航员的经验制订试验方案。在预设工况条件下,通过对Q-Flex和Q-Max型LNG船舶进出唐山LNG终端码头的模拟试验,从船舶操纵角度验证码头泊位、进出港水域的合理性和可行性。总结操作过程中的经验,为以后实际操船提供参考。
1.3 FMBS的关键控制点分析
(1)通过试验船型进出唐山LNG终端码头附近水域的航行和靠离泊模拟试验,研究LNG船舶航行和靠离泊的运动轨迹及操作要点(包括在各航段的航速控制范围),确定LNG船舶靠离泊的极限条件及其安全对策,确定各种条件下的港作拖船配置。
(2)通过本港口水域交通条件的实景模拟,分析水域环境安全现状,提出改善安全管理的措施。
(3)运用船舶操纵模拟技术,模拟Q-Flex和Q-Max船型航行,分析在不同的风、流、浪等环境因素影响下,以及相应的拖船配合下,进出该水域的可行性和安全性。
(4)引航员和拖船船员进行模拟驾驶及操纵配合,了解Q-Flex和Q-Max船型航行、靠离泊要点。
(5)船舶模拟靠泊试验可为唐山LNG终端码头安全运营提供科学依据,为相关主管部门制订决策提供支持。
2 FMBS的应用
2.1 码头工程简介
曹妃甸港区位于唐山市南部海域,地理坐标北纬38€?5',东经118€?0';西距天津港38 n mile,东北距秦皇岛港92 n mile,距京唐港33 n mile。
终端码头作为一个LNG船专用卸船泊位,可接收舱容量为27万m3(兼顾舱容量介于8万~27万m3)的船型。LNG码头布置在终端 15 m等深线区域,总体位于曹妃甸港区东南侧已建的30万吨级原油泊位东。码头轴线为68€啊?48€啊U磺糯怪庇诔∏ぐ叮艹ざ? 899 m。
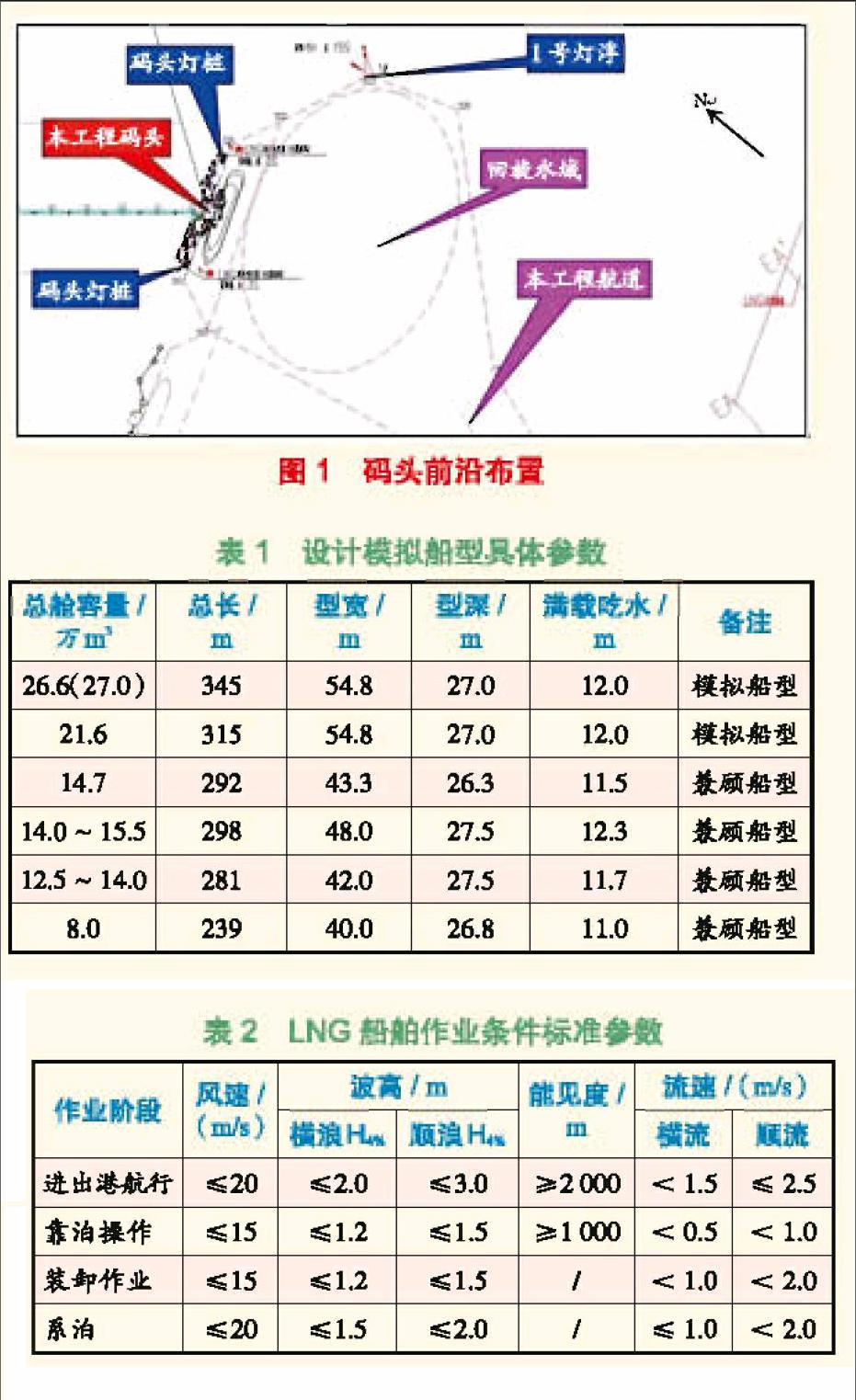
泊位总长度410 m,采用“蝶”形墩台式平面布置型式,设置工作平台1座、靠船墩4座、系缆墩6座,另按照工艺要求在工作平台后紧邻栈桥设控制平台1座。在码头最外侧的两座系缆墩上分别安装灯桩各1座,回旋水域东侧灯浮1座(1号灯浮)(见图1)。
2.2 设计模拟船型参数
设计模拟船型见表1。
图1 码头前沿布置
表1 设计模拟船型具体参数
2.3 FMBS方案设计
根据《液化天然气码头设计规范》,LNG船舶作业条件标准参数见表2。
表2 LNG船舶作业条件标准参数
根据《曹妃甸港区LNG船舶进出港方案的讨论》[1],码头前沿水域及航道附近最浅水深为 ,考虑到LNG最大船舶满载吃水为12 m,故当LNG船舶靠离唐山LNG终端码头时,无需乘潮作业。考虑到潮汐的影响,码头前沿水域最大流速小于1.25 m/s;风、浪因素在设计模拟试验方案时均考虑到《液化天然气码头设计规范》中规定的极端值。
经参加FMBS的专家讨论,考虑到码头前沿装有1号灯浮,若LNG船舶采用旋回掉头右舷靠泊码头,引航员心理压力加大,不利于船舶操纵安全。因此,只考虑LNG船舶左舷靠离泊码头。具体模拟试验方案见表3。
表3 LNG船舶靠离泊模拟试验方案
3 FMBS结果及分析
3.1 风对船舶靠离泊的影响
风对船舶满载进港航行操纵的影响不是很明显(见图2),对靠泊操纵有一定的影响(见图3)。风对满载LNG船舶靠泊的影响主要体现在风流共同作用上。对于船舶操纵来说,风流作用于同一舷侧的情况要比风流作用于不同舷侧的情况困难。
图2 试验1
图3 试验5
模拟试验表明,在风力不大于6级时,船舶能够安全地进行满载左舷靠泊和压载离泊操作。
3.2 流对船舶靠离泊的影响
3.2.1 涨流靠泊
船舶航行至航道末端时需适当降速,船速应控制在3 kn左右;至回旋水域,逐步向右转向,船速较慢,流的影响较大,注意调整受流角度,借助流、拖船、车、舵,控制船舶的横移速度,在抵达停泊水域前,平行靠泊。在涨流靠泊时,船舶应掌握好转向入泊横距、入泊角度、入泊余速以及靠泊的法向速度。
入泊横距可控制在3倍船宽左右,距泊位1倍船长时,余速控制在1~2 kn以下,注意保持合适的受流角度,以控制横移速度,使船舶缓慢靠向码头。
在船舶接近停泊水域时,应提前将船拉平。在贴靠码头时,建议法向靠岸速度控制在10 cm/s以下,靠泊角度不超过5€埃云叫锌坎次恕?
考虑到本码头航道之外为开阔水域,水深能够满足最大船型通航要求,根据当地习惯做法,可考虑进行大旋回自主掉头顺岸靠泊(见图4)。此时,船舶航速、入泊角度、入泊横距相对较容易控制,安全性相对较高。
在距泊位约1 n mile实施大旋回自主掉头,掉头后保持0.5 n mile左右的横距顺岸靠泊,利用风、流、车、舵,在拖船协助下缓慢靠向码头(见图5)。
图5 试验2
3.2.2 涨流和落流离泊
船舶利用拖船平行出泊,然后开艏,左舷受流,在涨流与拖船的共同作用下,使船舶离开码头。当船舶离开码头约0.5倍船长后,向右转向掉头(见图6)。
图6 试验3
船舶在向右转向时,可借助开艏时向右的转向角速度,且掉头过程中始终保持左舷受流,有益于船舶远离码头,操纵相对容易。在掉头过程中,应注意利用车、舵及拖船控制船舶的前冲、后缩,保持与码头的安全距离。因在掉头过程中左舷受流,船舶将会向右舷方向漂移,拖船应尽可能向上流用力,使船舶抢占上流位置。船舶在转向后,预配足够的风流压差,逐步加车,离开码头出港。
船舶利用拖船平行出泊,然后开艉,左舷受流,在落流与拖船的共同作用下,离开码头,并适当倒车以抢占上流。当船舶离开泊位0.5倍船长以上时,逐步向右转向(见图7)。若船舶离开码头的横距不足,向右转向时,右舷受流,艉易被压向码头。船舶向右转向后,右舷受横流影响向东漂移,此时应尽可能利用拖船向上流方向用力。拖船应具备足够的功率,船舶在离泊过程中注意利用车、舵及拖船控制其前冲、后缩,保持与码头以及1号灯浮的安全距离。
图7 试验4
模拟试验表明,在涨潮流最大流速为1.4 m/s或落潮流最大流速为1.1 m/s及风力不大于6级时,船舶能够安全地进行满载左舷靠泊和压载离泊。
3.3应急情况靠离泊
3.3.1 紧急离泊
在码头失火、LNG发生不可控泄漏、台风等情况出现时,船舶需紧急离泊。
图8 试验7
在模拟试验(见图8)中吹拢风(南风)8级(18.9 m/s)、涨流流速1.4 m/s时,4艘 kW(马力)拖船基本能够协助船舶安全离泊,但此时浪高应小于1.0 m,才能保证拖船发挥其作用。
3.3.2 船舶主机失灵后又恢复情况下的靠泊
在模拟试验南风6级、涨流流速1.4 m/s的情况下,Q-Max船型进港左舷靠泊。在船舶接近回旋水域时,主机失灵,此时可考察引航员的应变能力。
当主机失灵时,船速约3 kn。引航员发现主机失灵后,果断利用拖船协助向右转向,拟将船舶拖至应急锚地锚泊检修。当船舶尚在回旋水域内时,主机修复,此时船舶可继续靠泊(见图9)。试验表明,引航员所采取的措施果断、正确。
图9 试验8
4 FMBS的主要结论及建议
4.1 主要结论
(1)根据本工程码头的模拟试验结果,在指定工况下,Q-Flex和Q-Max船型进出港航行、左舷满载靠泊、左舷压载离泊均能安全完成。
(2)满载进港船舶从进港水域到码头的制动距离足够,船舶抵达泊位时的余速能够得到有效控制。码头附近水域开阔,水深充足,船舶进出港航行不仅限于设计航道,亦可进行大旋回自主掉头顺岸靠泊。
(3)码头轴线方向与涨落潮流基本一致,流对靠离泊船舶的影响相对较小,在靠离泊时可充分加以利用。
(4)横流对操纵安全影响较大,尤其是当流速较大和(或)低速航行时,船舶横向漂移显著,因而应预配合适的风流压差,以便于船舶操纵。
(5)模拟试验结果表明,本码头的掉头回旋水域能够满足设计船型靠离泊操纵的要求。
4.2 建 议
(1)大型船舶在本港区进出港时,须由2名港区资深引航员进行引航。
(2)在通航环境允许条件下,船舶可大旋回自主掉头靠泊。
(3)LNG船舶在进出港、靠离泊操作时,应熟知港口信息,严格遵守码头管理规定,保证安全靠离泊操作。
(4)船舶在靠离泊时,应充分考虑当时的实际气象和水文情况,并充分注意船舶操纵模拟器模拟结果的局限性及与实际情况的差异。
(5)密切注视涌浪对泊稳的影响。在靠泊期间,随时监控码头附近气象、海况,并根据气象部门发布的天气预报,当风力或码头水域涌浪超过规定作业范围时,应果断停止靠泊作业,择机靠泊。紧急离港时,应确保码头和船舶安全。
参考文献:
[1] 张鹏飞,李宝玉.LNG船舶进出曹妃甸港区方案选择及船舶操纵要领[J].水运管理,2015(9):9-12.
猜你喜欢
装备维修技术(2022年7期)2022-07-01
科学与财富(2021年35期)2021-05-10
智富时代(2019年3期)2019-04-30
智富时代(2019年3期)2019-04-30
伙伴(2018年1期)2018-05-14
中国高新技术企业(2016年32期)2016-12-27
中国市场(2016年21期)2016-06-06
水运管理(2015年11期)2016-01-30
航运交易公报(2015年38期)2015-12-01
