
新型同步磁阻电机的转子结构设计与特性分析
2016-02-26 00:48张志耿汤宁平许共龙
电机与控制应用 2016年1期
关键词:有限元
张志耿, 汤宁平, 许共龙
(福州大学 电气工程与自动化学院,福建 福州 350108)
新型同步磁阻电机的转子结构设计与特性分析
张志耿,汤宁平,许共龙
(福州大学 电气工程与自动化学院,福建 福州350108)
摘要:简要介绍了同步磁阻电机的结构及工作原理。通过有限元软件分析转子主要结构参数,如气隙磁障层、气隙占比、磁肋宽度对电感和凸极比的影响,为同步磁阻电机的转子最优设计提供参考。同时分析了不同负载电流下电机的电感和转矩特性,结果表明电机的电感随负载变化,且最大转矩电流角随着负载电流的增大而增大。最后根据仿真结果试制样机,通过试验验证有限元仿真的正确性。
关键词:同步磁阻电机; 有限元; 凸极比; 转矩特性; 电感特性
0引言
同步磁阻电机(Synchronous Reluctance Motor, SynRM),定子与普通异步电机一样,转子采用特殊结构的硅钢片叠压而成,不存在鼠笼或永磁体,完全依靠磁阻转矩驱动电机。由于SynRM不存在转子损耗,与异步电机相比运行时具有更高的效率和较低的温度,能够实现更大的功率密度和转矩密度,为此吸引了大量国内外学者的研究[1-2]。
图1为两种不同工艺的SynRM。图1(a)为轴向叠片各向异性(ALA)结构,图1(b)为横向叠片(TLA)结构[3]。文献[4-5]对ALA结构的电机进行研究,得到的样机凸极比超过11,功率因数超过0.85,但这种结构加工工艺复杂,人工成本高,

图1 两种不同工艺的同步磁阻电机
不适合工业生产。TLA结构的电机与ALA结构相比牺牲了凸极比,导致电机功率因数较低,但转子结构加工简单,成本低,适于生产。文献[6]对转子采用梯形开槽结构的TLA SynRM进行仿真,分析了转子参数对电机的影响。文献[7-8]通过试验对比TLA结构的SynRM与对应的异步电机的性能,得到相同的结论: 在输出功率相同时,SynRM具有比异步电机更高的效率。
本文通过有限元软件Ansoft对TLA结构的同步电机进行仿真,分析转子结构参数对电机性能的影响以及不同电流情况下电机的转矩、电感特性,为SynRM的设计及控制提供参考。最后根据仿真结果制作样机,通过样机试验验证了有限元仿真的正确性。
1SynRM数学模型
在不计铁耗等假设条件下,得SynRM在同步旋转dq坐标下的矢量图如图2所示。图中Is和Us为三相合成电流和电压矢量,Rs为定子电阻,Id和Iq分别为为电流的交直轴分量,Xd和Xq分别为交直轴电抗,为功率因数角,γ为电流矢量与d轴夹角。

图2 SynRM矢量图
SynRMdq坐标系下磁链、电压、电磁转矩、功率因数方程如下。
电压方程:
ud=Rsid-ωrLqiq+Ldpid
(1)
uq=Rsiq-ωrLdid+Lqpiq
(2)
磁链方程:
ψd=Ldid
(3)
ψq=Lqiq
(4)
转矩方程:
(5)
由于电机的定子电阻远小于交直轴电感,忽略不计,得功率因数:
(6)
式中:Ld、Lq——交直轴电感;
K——凸极比,K=Ld/Lq。
根据转矩公式(5)知在电流大小和相位固定的情况下,电机的输出转矩正比于交直轴电感差值Ld-Lq,用ΔL表示。
根据式(6)求出功率因数同凸极比K和电流角γ之间的关系曲线,如图3所示。由图可知电机能达到的最大功率因数随着凸极比的增大而增大,当凸极比超过6时电机的功率因数就能超过0.7。
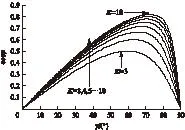
图3 SynRM功率因数同电流角和凸极比关系
综上,SynRM的交直轴电感差值与输出转矩对应,凸极比与功率因数对应,要想电机的输出转矩和功率因数大,就要尽可能的增大交直轴电感差值和凸极比。
2转子结构参数与电机性能关系分析
本文只进行转子结构的研究,不涉及定子,定子部分直接采用一台3kW异步电机的定子。异步电机参数如表1所示。
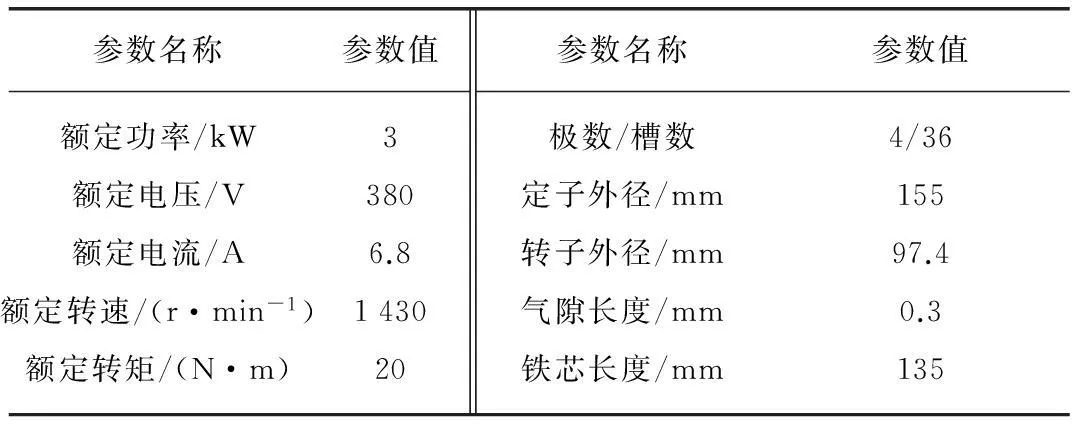
表1 异步电机主要参数
本文利用有限元软件分析研究转子结构参数与电机性能的关系。图4所示为电机转子结构(1/4模型),白色部分为气隙磁障,每条气隙宽度相等,灰色部分为导磁条,其中导磁条宽度w2=w3=2w1。转子主要有四个参数: 气隙磁障层数n(图4所示n=3)、气隙占比w(气隙磁障宽度总和/(气隙磁障宽度总和+导磁条宽度总和))、磁肋宽度rib1和rib2(如图4中所示)。
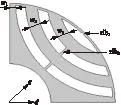
图4 1/4转子结构图
图5和图6为施加额定电流激励,电流角γ=60°时电机内部的磁力线走向和磁密分布图,由于气隙磁障磁阻大,导磁条磁阻小,因此转子部分磁力线主要通过导磁条,其磁密较大。
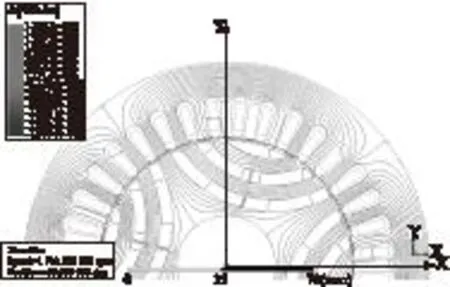
图5 SynRM磁力线
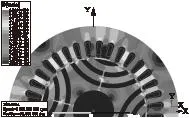
图6 SynRM磁密分布
2.1气隙磁障层数的影响
电机转子由导磁条和气隙磁障交替组成,磁障部分类似于转子开槽,因此存在齿槽效应,引起损耗和转矩脉动。气隙磁障层数将直接影响电机的转矩脉动的大小和加工的难易程度,在选择气隙磁障层数时既要考虑其对电机性能的影响,也要考虑加工工艺。
图7为气隙磁障层数n对电机的影响,可以看出气隙磁障层数主要影响直轴电感,对交轴电感影响很小。当n<3时,直轴电感随着n的增大而迅速增大,而交轴电感基本保持不变,这使得凸极比和交直轴电感差值也随着增大,电机的输出转矩和功率因数变大。当层数超过3时,交直轴电感基本保持不变,层数对电机的输出转矩和功率因数影响不大。根据仿真结果,当n等于3,5,6时电机转矩脉动(转矩峰峰值/平均值)较小,分别为32%、25%、26%,当n等于4和7时转矩脉动较大,为68%和52%。这是由于本文电机定子采用36槽,当n等于4和7时齿槽效应影响较大。本文选择n=3,虽然转矩脉动较n=5时大,但加工更为简单。
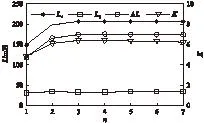
图7 气隙磁障层数n与电感和凸极比关系
2.2气隙占比的影响
负载电流额定情况下,气隙占比将影响转子磁路的饱和程度,从而影响电机的性能。气隙占比较小时,q轴磁阻较小,电感较大,电机凸极比和交直轴电感差值较小,电机的功率因素和输出转矩较小;气隙占比较大时,虽然q轴电感较小,但是d轴磁路较为饱和,磁路磁阻较大,d轴电感有所减小,同样使凸极比和交直轴电感差值较小,影响电机的功率因数和输出转矩。为此,应该选取适当的气隙占比使电机具有较好的性能。
图8表明交直轴电感差值在w等于0.4到0.5之间达到最大值,而凸极比则在w等于0.55到0.6之间达到最大值,权衡两者,本文取w等于0.5。
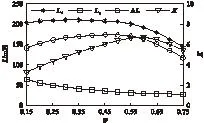
图8 气隙占比w与电感和凸极比关系
2.3磁肋rib1和rib2影响
磁肋rib1和rib2为q轴电流分量提供磁路,磁肋越粗,q轴电感越大,凸极比和交直轴电感差值较小,电机的输出转矩和功率因数也较小;磁肋太细,影响到转子的机械强度,同时对加工工艺要求较高。
图9为rib1宽度与电感和凸极比的关系。由图可知适当的增加rib1的宽度,可以使d轴电感变大,从而使交直轴电感差值变大,增大电机的输出转矩,但随着rib1的增大,凸极比随之变小,功率因数变低。图10表明随着rib2的增大,电机的交直轴电感差值和凸极比都减小,电机的输出转矩和功率因数都减小。考虑到转子的机械强度和加工工艺,本文取rib1=rib2=1mm。
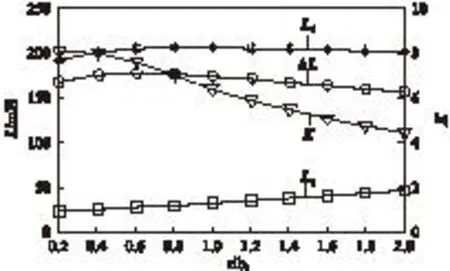
图9 rib1与电感和凸极比关系
图10 rib2与电感和凸极比关系
3不同负载下电感、转矩特性分析
由于电机转子结构比较特殊,转子不存在励磁电流,转子磁路的饱和程度取决于负载电流。因此负载的变化将会影响磁路饱和程度,从而改变电机的交直轴电感,影响电机性能。本文通过施加不同大小和相位的电流激励来实现对不同负载的仿真。
图11为额定电流情况下,电机的电感、转矩、凸极比随γ的变化曲线。根据图11(a)仿真结果可得,随着电流角γ的增大,直轴电感随之增大,而交轴电感却相反减小,当γ大到一定程度后,交直轴电感基本保持不变。这是因为随着电流角γ增大,电流的直轴分量减小,直轴磁路越来越不饱和,交轴分量增大,交轴磁路越来越饱和,导致直轴电感越来越大,交轴电感越来越小。当γ大到一定程度时,直轴电流很小,磁路近似呈线性,所以随着γ增大直轴电感基本不变,而交轴磁路深度饱和,磁阻基本不变,因而交轴电感也基本不变。由于交直轴电感随电流角改变,导致凸极比和电机输出转矩也随着γ改变。由图11(b)知电机凸极比在γ=70°时达到最大,约为6.5。最大转矩在γ=60°,为18.3N,对应的输出功率为2870W,略小于异步电机,但由于不存在转子损耗,使得电机内部温度较低,允许定子绕组通入更大的电流,输出更多功率。
图11 电流角γ对电感、转矩、凸极比影响
图12为负载电流从0.4In到1.4In时电机的交直轴电感和转矩随变化情况。图12(a)、(b)表明电机的交直轴电感为变量,随负载变化。由图12(c)可以看出输出转矩随着电流的大小和相位的变化而变化,且最大转矩电流角不是一个常量,随着电流的增大而增大。
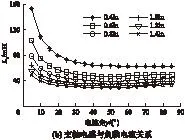

图12 负载对电机电感、转矩的影响
通过以上分析知道,SynRM的电感不是一个常量,与负载电流的大小和相角密切相关。因此在SynRM的控制过程中,为使电机达到较好的性能,不能简单的把电感看成常量,而应考虑负载电流的影响,同时电机的最大转矩角也随负载电流变化,这将使电机的控制策略变的复杂。
4样机试验分析
图13所示为根据仿真结果设计加工的转子冲片。样机的设计气隙为0.3mm(与对应异步电机相同),但由于加工的原因,实际气隙为0.45mm。试验时用直流电动机将样机拖至同步速,然后接供电网运行。

图13 转子硅钢片
图14所示试实验与仿真对比,可以看出仿真结果与试验较为吻合。从图14可以看出样机具有较高的效率,在较大负载范围内保持着较高效率(85%以上),在输出为3kW时效率为87.5%,高于对应的异步电机(83.7%)将近4个百分点,然而样机的功率因数较低,为0.693。通过对比气隙为0.3mm和0.45mm的仿真结果知减小气隙可以进一步提高电机的效率(约90%),同时增大功率因数(约0.72)。另外由于SynRM在实际运行中是通过控制器控制运行的,因此可以通过选择合适的控制方式进一步增大电机的功率因数。
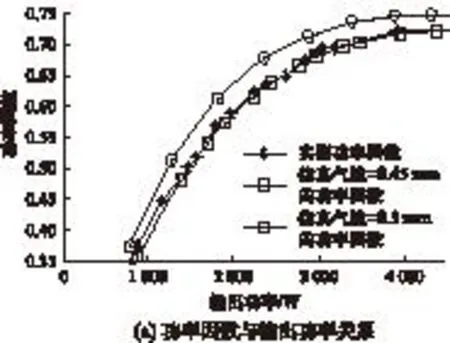
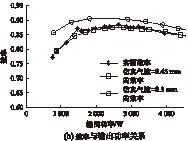
图14 实验与仿真的功率因数、效率曲线
5结语
通过上述的仿真和试验,可得如下结论:
(1) SynRM的交直轴电感分量是个变量。当负载电流大小固定时,随着电流角γ的增大,直
轴电感先增大,交轴电感先减小,当γ增大到一定时交直轴电感基本保持不变。
(2) SynRM的最大转矩电流角随着负载电流的增大而增大。
(3) 与同等级异步电机相比,SynRM具有更高的效率,且在较大负载范围内保持着高效率,能够有效地节约电能。
【参 考 文 献】
[1]LIPO T A. Synchronous reluctance machine: A viable alternative for a.c. drives?[J]. Elect Mach Power Syst, 1991,19(6): 659-671.
[2]吴汉光,林秋华,游琳娟.同步磁阻电动机研究[J].中国电机工程学报,2002,22(8): 94-98.
[3]KOLEHMAINNEN J. Synchronous reluctance motor with form blocked rotor[J]. IEEE Transactions on Energy Conversion, 2010,25(2): 450-457.
[4]易明军,辜承林.高凸极比轴向叠片式转子电机设计及其参数测定[J].微特电机,2000(2): 15-17.
[5]STATON D A, MILLER T J E, WOOD S E. Maximizing the saliency ratio of the synchronous reluctance motor[J]. IEE Proceedings-B, 1993,140(4): 249-259.
[6]周浩,严欣平,卢全华,等.转子结构对同步磁阻电机电感参数及转矩的影响[J].微电机,2013(9): 22-26.
[7]BOGLIETTI A, CAVAGNINO A, PASTORELLI M, et al. Experimental comparison of induction and synchronous reluctance motors performance[J]. IEEE Industry Applications Society Annual Meeting, Seattle, 2005,1(6): 474-479.
[8]MOGHADDAM R R, MAGNUSSEN F, SADARA-NGANI C. Theoretical and experimental reevaluation of synchronous reluctance machine[J]. IEEE Trans Ind Electron, 2010,57(1): 6-13.
[期刊简介]
《电机与控制应用》(原《中小型电机》)创刊于1959年,是经国家新闻出版总署批准注册,由上海电器科学研究所(集团)有限公司主办的具有专业权威的电工技术类科技期刊。
期刊定位于电机、控制和应用三大板块,以中小型电机为基础,拓展新型的高效节能和微特电机技术,以新能源技术和智能控制技术引领和提升传统的电机制造技术为方向,以电机系统节能为目标开拓电机相关应用,全面报道国内外的最新技术、产品研发、检测、标准及相关的行业信息。
本刊每月10日出版,国内外公开发行,邮发代号4-199。在半个多世纪的岁月中,该杂志为我国中小型电机行业的技术进步与发展做出了巨大的贡献,在中国电机及其应用领域享有很高的影响。
依托集团公司雄厚的技术实力和广泛的行业资源,《电机与控制应用》正朝着专业化品牌媒体的方向不断开拓创新,在全国科技期刊界拥有广泛的知名度,是“中国学术期刊综合评价数据库来源期刊”、“中国科学引文数据库来源期刊”、“中国学术期刊(光盘版)全文收录期刊”,得到了业内人士的普遍认可,备受广大读者的推崇和信赖,多次被评为中文核心期刊、中国科技核心期刊、全国优秀科技期刊。
Rotor Design and Characteristics Analysis of Synchronous Reluctance Machine
ZHANGZhigeng,TANGNingping,XUGonglong
(College of Electrical Engineering and Automation, Fuzhou University, Fuzhou 350108, China)
Abstract:The structure and principle of synchronous reluctance motors (SynRM) were briefly introduced. The relationship between main parameters of rotor such as number of barrier layers, the percent of barriers, the width of rib,and machine’s induction and saliency ratio was investigated using finite-element software. These works would provide reference for the design of SynRM. The SynRM’s characteristic of inductance and torque under different current load were also investigated, the simulation results indicated that the inductance and the current angle of Maximum Torque Per Ampere (MTPA) was influenced by current load. Finally, the prototype was made according to the result of simulation and the simulation results were proved to be correct by the experiments.
Key words:synchronous reluctance machine; finite-element; saliency ratio; torque characteristic; inductance characteristic
收稿日期:2015-07-23
中图分类号:TM 352;TM 341
文献标志码:A
文章编号:1673-6540(2016)01- 0042- 06
作者简介:张志耿(1990—),男,硕士研究生,研究方向为新型电机理论与控制技术。汤宁平(1954—),男,教授,研究方向为新型电机理论与控制技术。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
数学物理学报(2022年4期)2022-08-22
数学物理学报(2021年6期)2021-12-21
减速顶与调速技术(2020年4期)2020-11-22
上海节能(2020年3期)2020-04-13
石油化工建设(2019年6期)2020-01-16
装备制造技术(2019年12期)2019-12-25
天津医科大学学报(2019年6期)2019-08-13
锻压装备与制造技术(2016年3期)2016-06-05
汽车实用技术(2015年8期)2015-12-26
