
自动极坐标实时差分监测技术在地铁隧道结构变形监测中的应用
2016-02-26 09:07刘运明
测绘通报 2016年1期
刘运明
(北京城建勘测设计研究院有限责任公司,北京 100101)
Application of Automatic Polar Real-time Difference Monitoring Technology
in the Deformation Monitoring of Metro Tunnel Structure
LIU Yunming
自动极坐标实时差分监测技术在地铁隧道结构变形监测中的应用
刘运明
(北京城建勘测设计研究院有限责任公司,北京 100101)
Application of Automatic Polar Real-time Difference Monitoring Technology
in the Deformation Monitoring of Metro Tunnel Structure
LIU Yunming
摘要:自动极坐标实时差分监测系统在监测基准网的基础上,对监测数据进行实时差分处理,以消除和减弱各种误差对测量结果的影响,大幅度地提高了测量精度,为安全施工提供了准确、及时的指导数据,保证了地铁的安全运行,是一种简便、灵活、实时、动态的监测系统。工程应用表明,它可以进一步提高隧道、建筑物等安全监测工作的技术水平,提高工程安全监测的效率,减少工作人员的劳动强度,节省大量的人力、物力和资金,实现对隧道等构筑物的实时监测。可在地铁运行间隔内迅速完成隧道的三维变形监测。
关键词:自动极坐标;实时差分;地铁隧道;变形监测
在地铁隧道的施工和运行过程中,为了保证隧道结构的安全,需要对地铁隧道进行高频率、高精度的变形监测。由于地铁隧道施工的特殊条件,传统的人工测量耗时长、精度低,不但影响正常的隧道施工工序,而且不能及时、快速、准确地反映隧道结构变形的情况,因此地铁隧道自动变形监测系统具有重要的现实意义。
自动变形监测系统与传统人工监测相比较,具有连续、动态、实时、精确等显著优势。目前国内外远程自动化监测系统主要有近景摄像测量系统、多通道无线遥测系统、光纤监测系统、全站仪自动测量系统、静力水准仪系统、巴赛特结构收敛系统等[1-2]。本文主要介绍全站仪极坐标自动测量系统在地铁隧道变形监测中的应用。
一、测量原理
1. 极坐标测量原理
地铁隧道全站仪自动监测采用极坐标法测量,如图1所示,以设站点O为原点,测站的铅垂线为Z轴,以定向方向为X轴,建立左手直角坐标系O-XYZ。
设全站仪测量P点的观测值分别为:水平角α,垂直角β,斜距s,则P点在图1的测站坐标系下的坐标为
(1)

图1 极坐标测量示意图
2. 精度分析
在不顾及已知点误差的情况下讨论观测点的误差,由图1可知OP的平距D=Scosβ,根据式(1)分别对观测量α、β、s求全微分可得
(2)
转换为中误差形式并用矩阵表示为
(3)
式中,mx、my、mz分别为点位的三维坐标在x、y、z方向的中误差;ms为测距中误差;mα、mβ分别为方位角和竖直角的测角中误差。根据Helmert点位误差估计公式可知
(4)
将式(3)代入式(4)可得P点的点位中误差为
(5)
由式(5)可知, 待定点P的点位精度与仪器的测角、测距精度有关。为使该方法测量获得较高的点位精度,应尽量控制角度和距离的相互关系。
3. 观测值的改正
在运营地铁的监测环境中,温度、大气折光、气压、结构振动、空气扰动等环境因素均会造成基准点、测量机器人和监测点的微动变化,导致距离测量和角度测量的偏差,采用实时差分技术可以减弱这些因素对测量结果的影响。
(1) 斜距的差分改正
在极坐标变形监测系统中,温度、气压和湿度等影响距离测量的结果,假设某一时段内基准点和测站点的位置是稳定的,就可以利用测站点和基准点之间的已知距离对大气折射率进行实时差分改正[3-5]。
(6)
(7)
为了保证距离气象改正比例系数ΔS的可靠性和准确性, 实践中取多个基准点测定的距离气象改正比例系数ΔS的中数,用于相似区域变形点距离测量的差分气象改正。
(2) 高差的差分改正
在极坐标变形监测系统中,高差测量的精度与球气差的影响有关[3-5],为了准确测定变形点的三维坐标,必须考虑球气差对高差测量的影响。监测站与各基准点之间经精密水准测量高差Δh0是已知的。如果某一时刻测得监测站与某基准点间的单向三角高差hJ为
hJ=SJ·sinβ+iJ-tJ
(8)
式中,β为垂直角;iJ为仪器高;tJ为目标高。球气差改正系数c可表示为
(9)
变形点与监测站之间经球气差改正的三角高差hP可表示为

(10)
根据变形观测点的斜距改正数和高差改正数即可求出平距的改正值为
(11)
(3) 方位角的差分改正

(12)
(13)
(4) 变形点三维坐标和变形量的计算
经过对距离、高差和方位角三者的差分改正,根据极坐标计算公式求得变形点的三维坐标为
(14)
式中,(X0,Y0,Z0)为监测站的坐标值。
(15)
二、自动极坐标实时差分变形监测系统
自动极坐标实时差分变形监测系统主要由控制单元、无线通信单元和数据采集与处理单元组成。该系统的基本结构如图2所示。
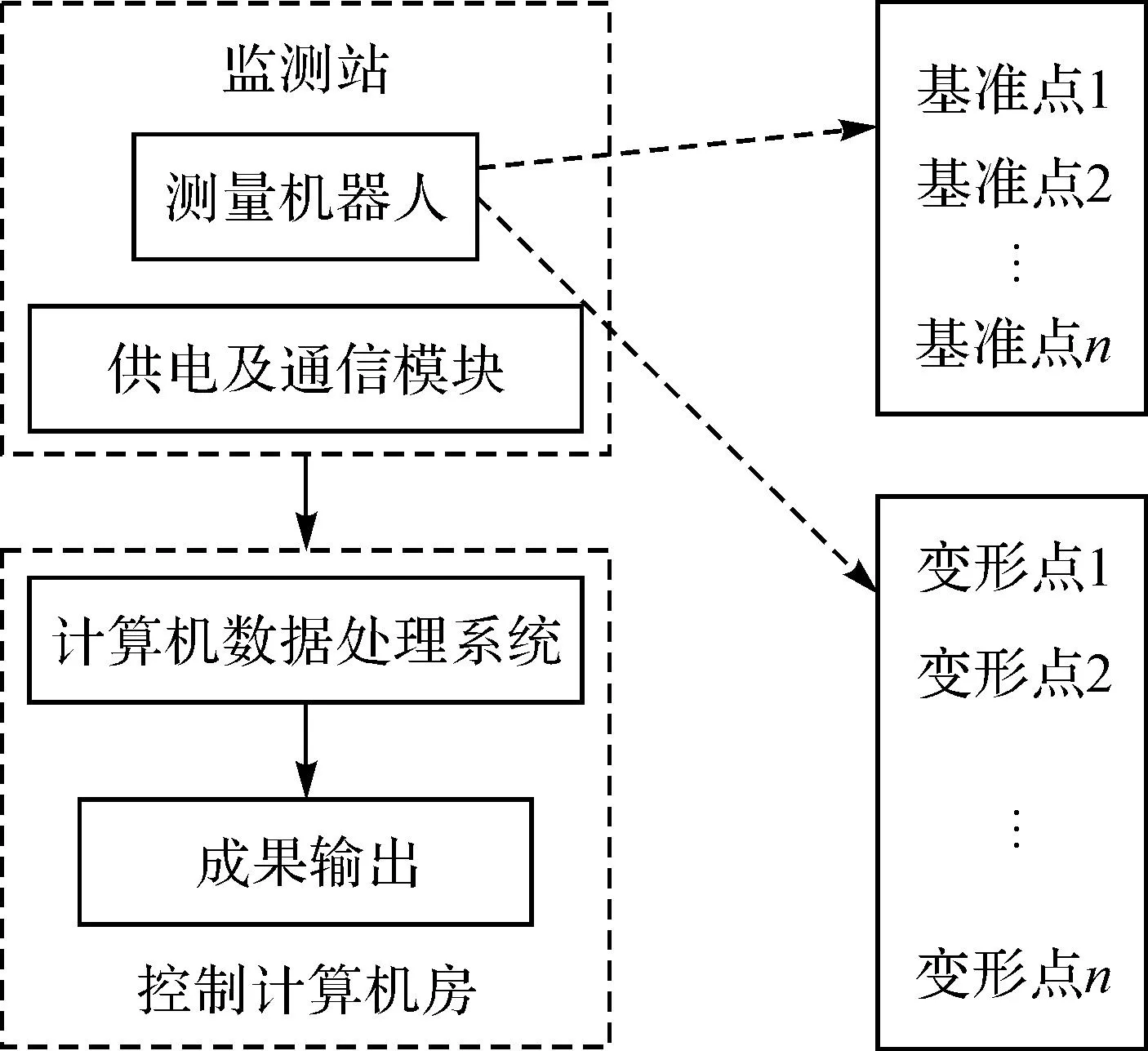
图2 监测系统结构
1. 硬件构成
自动极坐标实时差分变形监测系统的硬件主要由测量机器人、无线通信模块和系统控制中心构成(见表1)。
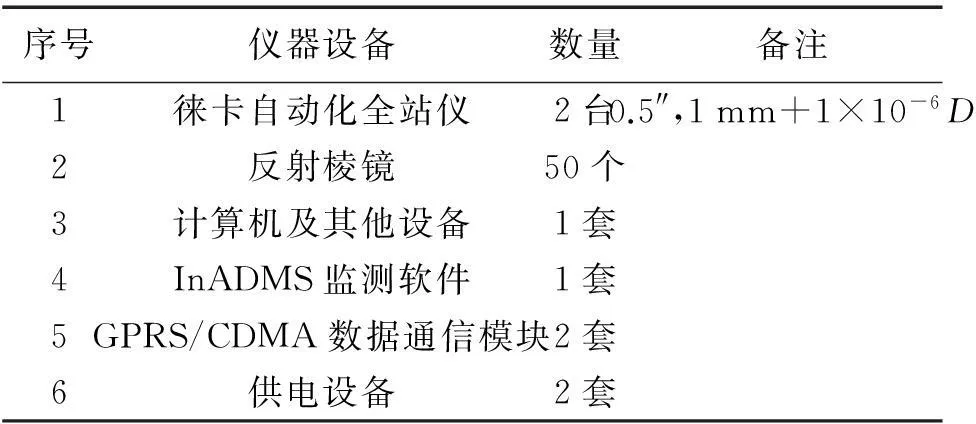
表1 自动极坐标实时差分变形监测系统主要仪器设备
1) 测量机器人:为实现远程控制采集数据,系统要求测量机器人具有马达驱动和目标自动搜索、识别、跟踪等功能。
2) 无线通信模块:要实现控制中心控制测量机器人采集数据,必须在两者之间建立可靠的通信链路。通过Internet建立的通信链路可分为有线和无线两种方式。
3) 系统控制中心,系统控制中心的服务器或工作站上需要安装可以连接公网的调制解调器或网卡,并拥有路由器分配的可通过公网访问的固定IP地址,来接收通过公网传输的或GPRS/CDMA无线传输的数据。
2. 软件构成
自动极坐标实时差分变形监测系统软件主要由3部分组成:即测量机器人机载软件、无线通信模块软件和控制中心软件包。
1) 测量机器人机载软件,主要是测量机器人极坐标多测回自动观测软件,负责自动搜索、识别、照准、跟踪目标、自动测角、测距及超限或目标丢失等异常情况的自动处理。
2) 无线通信模块程序,主要负责建立通信链路,用来转发指令或数据。
3) 控制中心软件,主要实现发送开关机、边角观测、气象观测等控制指令和接收观测状态、测量数据。实现测量过程、数据记录、数据处理和报表输出的自动化,实现真正意义上的测量自动化和一体化。
三、应用实例
1. 工程概况
新建六号线天河客运站—长湴站位于既有3号线的西侧,采用盾构法施工。3号线天河客运站于2006年12月建成通车。6号线盾构隧道与3号线天河客运站主体建筑平面相互关系如图3所示,其中,6号线隧道右线与既有线路两线之间距离为4.4~10.6 m;六号线埋深约32.4 m;既有3号线埋深约20.8 m。
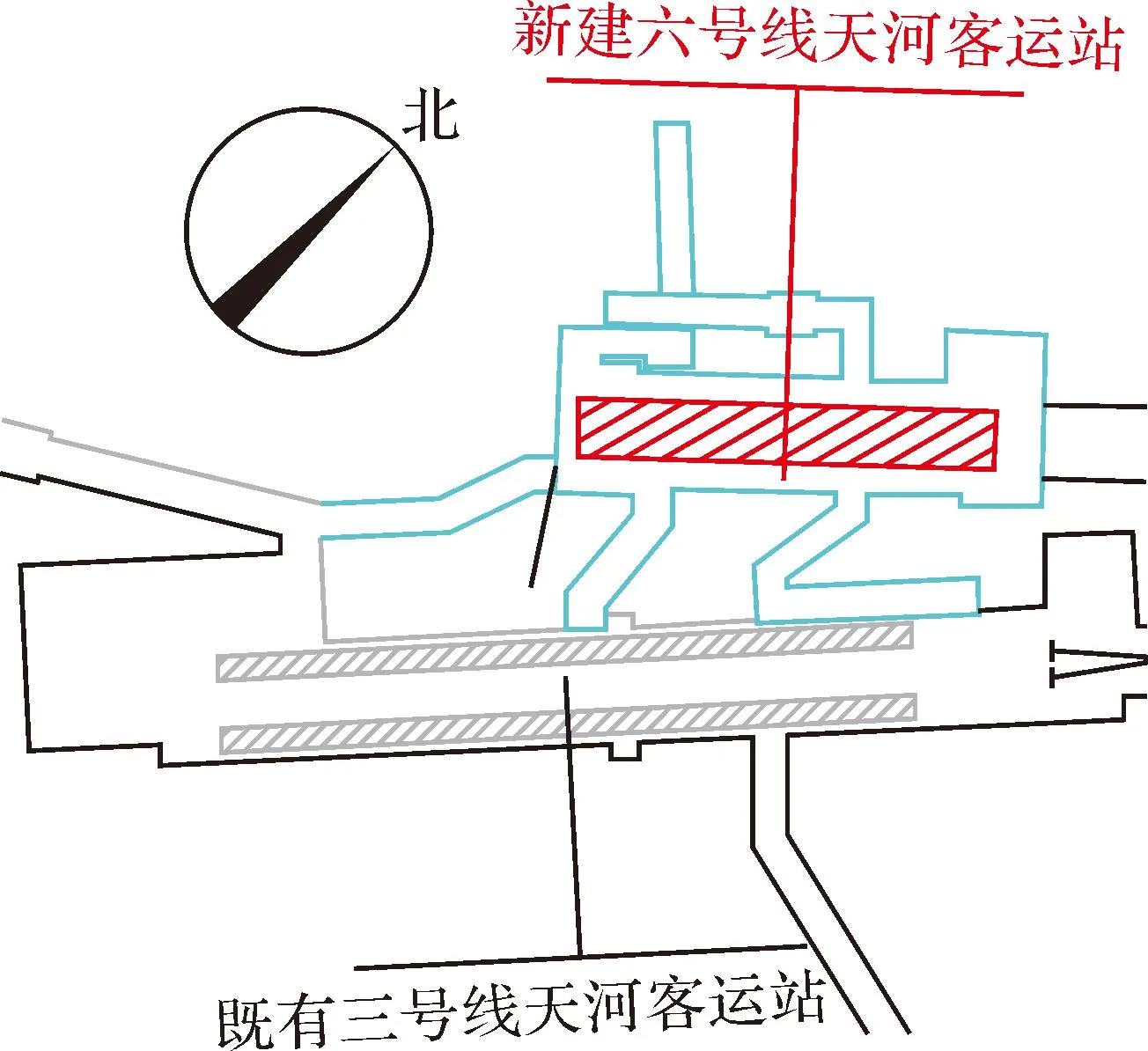
图3 开挖基坑与既有线车站平面位置图
2. 监测实施
(1) 基准点设置
根据系统布设原理,拟在左、右线各设置1条测线,每条测线设置2个基准点,10个监测断面,基准点布设在远离变形区以外,距离最外侧观测断面50 m左右的轨道结构外侧,基准网点采用独立坐标系统。
(2) 监测点设置
本次监测对影响段100 m范围区间进行安全监测,主要通过自动极坐标实时差分变形监测系统对该影响区间的隧道结构进行三维位移监测。在100 m区间范围内的左、右线各设置10个监测断面,每个监测断面在隧道顶部、底部各安装一个监测棱镜,在站台对面的侧墙上从上往下等间距布设3个监测棱镜,左右线共布设50个变形监测点。监测断面的布设位置如图4所示。

图4 监测断面点位分布
3. 数据处理及分析
本工程监测工作从2011年2月19日进场至2011年10月25日结束,历时8个月时间。在整个施工过程中进行全过程监测,实施过程中,业主、设计、监理及承包商等密切配合,采用综合分析方法,包括对现场进行系统监测,根据施工情况、施工工况及监测资料,对每一施工工况进行有针对性的预测,更好地指导了施工。
由表2可以看出,结构绝对变形量最大为-3.46 mm(S7-2,DY方向),小于预警值10 mm;隧道相对变形量最大为-4.19 mm(S7-2),大于预警值3 mm,小于报警值4.8 mm,此时若采取相应的安全技术措施,完全可以控制隧道的变形。
选取距离开挖基坑最近的面4为例来分析土建施工对既有线结构变形的影响。断面4监测点的三维坐标累计变形量统计见表3。

表2 各监测断面坐标分量最终累计变形量最大值统计表 mm

表3 断面4监测点的三维坐标累计变形量 mm
从表3可以看出,X方向累积变形量最大为-1.86 mm(X4-2),Y方向累积变形量最大为-0.43 mm(S4-2),Z方向累积变形量最大为-1.83 mm(S4-1),均小于结构绝对变形量的预警值10 mm,由此可以判定临近基坑开挖对断面4的影响较小。断面4监测点的三维坐标监测频次-累计变形量曲线如图5—图10所示。
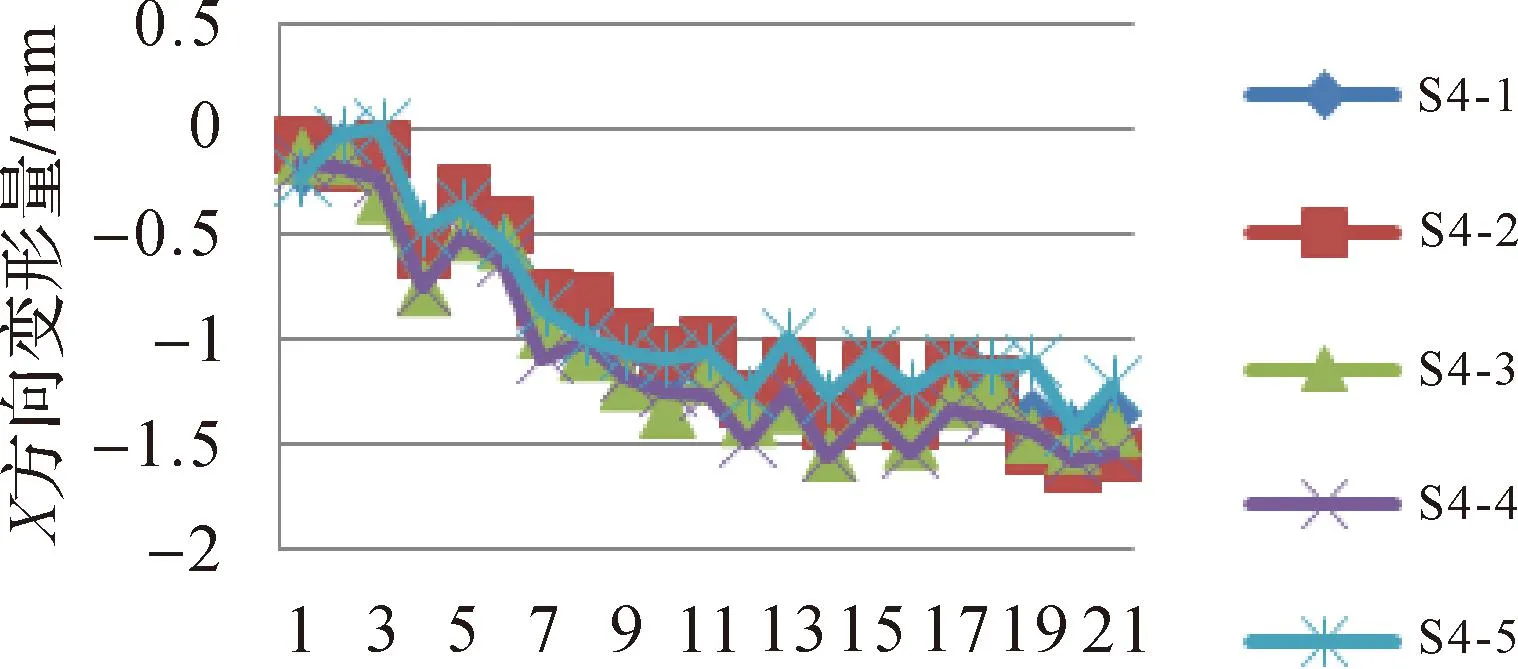
图5 上行断面4监测点X坐标变形曲线

图6 上行断面4监测点Y坐标变形曲线
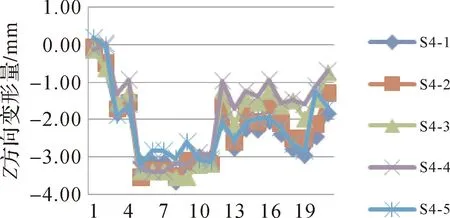
图7 上行断面4监测点Z坐标变形曲线

图8 下行断面4监测点X坐标变形曲线

图9 下行断面4监测点Y坐标变形曲线

图10 下行断面4监测点Z坐标变形曲线
从表3及图5—图10的曲线可以看出,从2011年2月19日至2011年10月25日,断面各监测点累计变化量远小于设计提供的控制标准,且各监测点的变化速率稳定。监测结果表明,整个施工过程对既有线的影响较小。各项累计监测数据变化较小,各监测点的沉降速率较稳定。
四、结束语
自动极坐标实时差分变形监测系统用于地铁隧道变形监测,具有以下明显的特点:
1) 在地铁隧道监测基准网的基础上 采用差分式测量技术可以消除或减弱各种误差(外部环境条件影响和仪器内部系统误差) 对测量结果的影响,使变形点三维坐标的监测精度达到了亚毫米级。
2) 在计算机的控制下实现了对地铁隧道全天候、无人值守、实时、动态、高精度的变形监测,并且实现了变形监测数据的实时采集与传输、管理、在线分析、综合成图、成果预警等功能,提高了变形监测的自动化、智能化水平。
3) 可在地铁运行间隔内迅速完成隧道的变形监测,同时获取变形监测点的平面和垂直位移信息,提高了工程安全监测的效率,减少了工作人员的劳动强度,克服了以往平面位移监测和垂直位移监测分别实施的缺陷,实现了对隧道等构筑物的实时监测。
参考文献:
[1]张冠宇,王海栋,李宗春,等.变形测量数据采集自动化技术比较[J].海洋测绘,2007:27(6):76-79.
[2]付艳华,冯玮光,宋责生.既有地铁线隧道结构的自动化监测[J].矿山测量,2012(3):81-83.
[3]刘博.上海地铁8号线管壁位移实时监测系统[D].青岛:中国海洋大学,2010.
[4]李金蕾.地铁地下隧道形变智能实时监测系统设计[D].青岛:中国海洋大学,2010.
[5]张志刚.穿越施工过程中已建隧道的管线形变监控方法[D].青岛:中国海洋大学,2011.
[6]袁成忠.智能型全站仪自动测量系统集成技术研究[D].成都:西南交通大学,2007.
[7]徐楠.地铁隧道管壁位移实时监测系统[D].青岛:中国海洋大学,2008.
[8]钱林.基于GeoCOM接口技术的测量机器人自动变形监测系统的研究与应用[D].北京:北京建筑工程学院,2010.
[9]徐忠阳,张良琚,包欢,等.自动极坐标实时差分监测系统及其在大坝外部变形监测中的应用[J].测绘通报,2001(9):28-30.
[10]曹庆磊.基于智能全站仪的自动变形监测系统开发及其在隧道监测中的应用[D] .青岛:山东科技大学,2011.
引文格式: 刘运明. 自动极坐标实时差分监测技术在地铁隧道结构变形监测中的应用[J].测绘通报,2016(1):99-103.DOI:10.13474/j.cnki.11-2246.2016.0025.
作者简介:刘运明(1980—),男,硕士,工程师,主要从事精密工程测量及变形监测工作。E-mail:985122935@qq.com
收稿日期:2014-10-23
中图分类号:P258
文献标识码:B
文章编号:0494-0911(2016)01-0099-05
猜你喜欢
公民与法治(2022年10期)2022-12-29
数学杂志(2022年5期)2022-12-02
湘潭大学自然科学学报(2022年2期)2022-07-28
煤气与热力(2022年4期)2022-05-23
水利水电科技进展(2021年6期)2022-01-07
新世纪智能(数学备考)(2021年5期)2021-07-28
河北理科教学研究(2020年1期)2020-07-24
水电站设计(2020年4期)2020-07-16
中学数学研究(广东)(2018年23期)2018-03-05
太空探索(2014年1期)2014-07-10
