
三维激光点云联合无人机影像的三维场景重建研究
2016-02-26 09:07闫阳阳李永强王英杰李立雪吴珍珍
测绘通报 2016年1期
闫阳阳,李永强,王英杰,李立雪,吴珍珍
(1. 河南理工大学,河南 焦作 454000; 2. 武汉海达数云技术有限公司,湖北 武汉 430223)
3D Scene Reconstruction Based on 3D Laser Point Cloud
Combining with UAV Images
YAN Yangyang,LI Yongqiang,WANG Yingjie,LI Lixue,WU Zhenzhen
三维激光点云联合无人机影像的三维场景重建研究
闫阳阳1,李永强1,王英杰2,李立雪1,吴珍珍1
(1. 河南理工大学,河南 焦作 454000; 2. 武汉海达数云技术有限公司,湖北 武汉 430223)
3D Scene Reconstruction Based on 3D Laser Point Cloud
Combining with UAV Images
YAN Yangyang,LI Yongqiang,WANG Yingjie,LI Lixue,WU Zhenzhen
摘要:采用空-地多源数据融合技术进行三维场景精细重建研究:以三维激光扫描激光点云为基础,获取地面可视地物的三维空间信息,以无人机航拍获得的正射影像为辅助,获取地物顶部三维空间信息,以3ds Max软件为建模工具对三维场景进行重建,系统研究了数据采集、数据预处理、三维模型构建、三维场景重建等关键技术。实例结果表明,重建的三维场景及模型精度能满足小范围场景建设需要。
关键词:三维激光点云;无人机影像;3ds Max;三维场景重建
三维场景重建是数字城市建设的重要组成部分,传统的三维建模方式已经无法满足人们对模型高精度的要求。很多城市已基本完成大区域的数字城市建设,小区域场景更新已经成为重要问题。三维激光扫描技术具有数据获取速度快、非接触、精度高、直接获取目标物体表面三维数据等优势[1-3]。无人机影像可以获取建筑物顶部和地面信息,结合三维激光扫描技术获取的建筑物立面信息,进行建筑物模型构建,可以完成三维场景的快速更新。当前研究建筑物场景建设的主要方法有基于二维GIS的三维模型构建、基于影像的三维模型构建、基于激光扫描数据三维模型构建等:曹峰[4]利用现有的二维GIS数据,结合野外采集的建筑物屋顶屋基高程、纹理信息,根据建筑物二维边界生成盒装的三维模型,然后赋予真实的表面纹理信息,生成建筑物模型;关鸿亮等[5]利用真正射影像和DSM结合构建建筑物方法,从影像上提取建筑物边界线,从DEM和DSM中获取建筑物高度信息,通过纹理方式完成建筑物三维场景的建设;赵海莹等[6]利用点云数据完成建筑物三维模型重建;李杰[7]等探讨了基于三维激光扫描技术进行建筑物三维重建的全过程,给出了模型建设的成果。本文探讨了两种数据的获取方法,使用激光点云数据联合无人机影像进行三维场景重建的过程,并对场景中建筑物模型精度进行分析。结果表明所建模型满足建筑物三维场景重建需要,为数字城市小范围场景重建和快速更新提供了参考。
一、空-地数据获取
地面三维激光扫描技术是继GPS之后测绘领域的又一前沿技术,是一种新型的空间数据获取手段。三维激光扫描仪主动发射激光,接收物体的反射信号进行测距,获得扫描的竖直角和水平角,求得物体在激光扫描坐标系中的三维坐标,同时获取目标物的反射强度和颜色信息[8]。地面三维激光扫描仪能快速获取建筑物立面、地面、树木等的三维表面信息。由于建筑物结构复杂、空间对象存在遮挡现象,点云数据获取时要进行分站扫描,并保证测站两两之间多于4个同名点。点云数据采集使用Riegl VZ-1000三维激光扫描仪,其100 m距离处一次单点扫描精度为5 mm,扫描视角为100°×360°(垂直×水平),完全能满足三维场景建设的需要。根据测区的遮挡情况,考虑到测站间同名点要多于4个,点云数据采集过程中设置了15个测站,每站测量只能得到建筑物的部分表面数据,多站点云数据拼接可得到场景完整的数据。采用基于特征点的拼接方法,相邻两站数据拼接至少选取4个同名点,拼接结果最大单点误差15 mm,能够满足建筑物三维重建的精度要求。
无人机遥感与大飞机航摄相比,具有机动性强、适应性强等优势,无人机采集的影像数据具有相幅小、分辨率高、色彩真实等特点,其更适合小范围、低成本、低精度的测量任务[9]。无人机能较好地获取建筑物顶部信息,可以弥补地面三维激光扫描仪无法获取建筑物顶部信息的缺点。无人机获取正射影像的方法为:在摄影测量软件基础上进行区域网空三加密,利用空三加密的定向成果和高精度匹配编辑获得的数字高程模型进行影像的数字微分纠正,经过裁切、镶嵌、色调调整等处理方法,得到以图幅为单位的正射影像成果数据[10]。
二、 三维场景重建关键技术
1. 建筑物模型重建
建筑物模型重建包括:点云数据预处理、特征线提取、模型构建、纹理映射等。点云数据预处理主要包括点云数据配准、噪声滤除、数据重采样、数据分割4个方面;模型构建、纹理映射在3ds Max软件中进行。其中建筑物模型重建流程如图1所示。

图1 建筑物模型重建流程
点云数据配准是将多测站扫描数据统一到同一坐标系下,有基于点云数据的拼接和基于测站的拼接。使用较多的是基于同名点的拼接方法,同名点可以是特制的标靶或具有明显特征的建筑物脚点和地物点[11-13]。拼接过程要多于4个同名点,以某一站为基准站,根据同名点求取其他测站相对基准站的3个旋转、3个平移参数。式(1)、式(2)通过6参数模型可以将点云配准到同一坐标系下。
(1)

(2)
式中,(X,Y,Z)为点云配准后坐标;(x,y,z)为点云原始坐标;Δx、Δy、Δz为平移参数;α、β、γ为旋转参数。
建筑物模型构建的主要目的是将点云数据构建为三维表面模型,便于后续的纹理映射。点云数据是海量数据,包含了大量的冗余信息,建筑物模型构建只需要一定的特征线,AutoCAD具有方向性好、线条矢量规则的优点,借助Cloudworx工具将点云拟合为矢量线。对不同建筑结构的特征线实行分图层式管理,以不同颜色区分显示,根据图层、颜色不同在3dsMax中对不同实体进行操作。
纹理映射是提高模型视觉真实感的重要手段,是三维场景重建中一个重要技术环节。3dsMax纹理映射是从二维图像到三维物体表面的映射,即将纹理空间坐标(u,v)及对应的颜色值映射到相应的三维物体表面上,得到逼真的三维模型[13]。
2. 无人机影像几何纠正
由于无人机影像的相幅较小,在进行影像纠正前首先要进行影像拼接,影像拼接使用Photoshop和ENVI结合的方法,无人机影像几何纠正是将原始的图像数据投影到平面上,把地图投影系统赋予原始图像,使其符合纠正要求形成新的影像。无人机影像几何纠正的基本步骤如图2所示。

图2 无人机影像几何纠正步骤
3. 建筑物模型与影像配准
建筑物模型与影像配准即点云数据与影像配准,在激光扫描数据和无人机影像进行三维场景重建前,为了保证融合数据的可靠性,需要进行激光点云系统和无人机影像系统间的配准,使得空地数据在同一坐标系统下。激光点云数据采集时使用的是激光坐标系,其属于独立坐标系。本试验通过场景内的控制点信息,寻找超过4个特征点,如墙角、路灯顶部,测出其当地坐标系下的坐标,在点云中查找对应点在激光点云下的坐标。当地坐标系与激光扫描仪坐标系之间的旋转角属于大旋转角,采用基于罗德里格矩阵的大旋转角坐标转换方法,求出两个坐标系统的旋转、平移参数,将成果由扫描仪坐标系转换到当地坐标系统下。
三、 实例分析
1. 三维场景重建
点云配准完成后,进行噪声滤除和数据重采样,数据重采样采用的是均匀采样法,噪声滤除采用人机交互滤除。然后将点云数据分割为4栋建筑物、中心花坛等几个部分。点云配准效果如图3所示。以一栋建筑物为例,使用三维激光扫描软件Cyclone及配套的AutoCAD插件Cloudworx,根据点云拟合建筑物结构线,将点云数据处理成建筑物线框图,建筑物墙面、门、窗、立柱等结构实行分图层式管理,以不同颜色显示,便于模型重建时能对相同实体进行相同操作,建筑物线框图如图4所示。将得到的目标建筑物线框图导入3ds Max中,选择以图层为节点层级,由材质划分,自动平滑外部相邻面等处理,处理后的建筑物三维模型如图5所示。

图3 点云配准效果

图4 建筑物线框图

图5 建筑物三维模型
建筑物侧面纹理影像由数码相机获取,顶部的纹理信息由无人机影像获取。在获取建筑物影像后,使用Photoshop对照片进行裁剪、色彩及明暗度等处理,得到纹理映射需要的部分。将纹理图片存储到3ds Max的根目录下,制作材质之后进行旋转、移动、缩放等调整。调整后效果如图6所示。
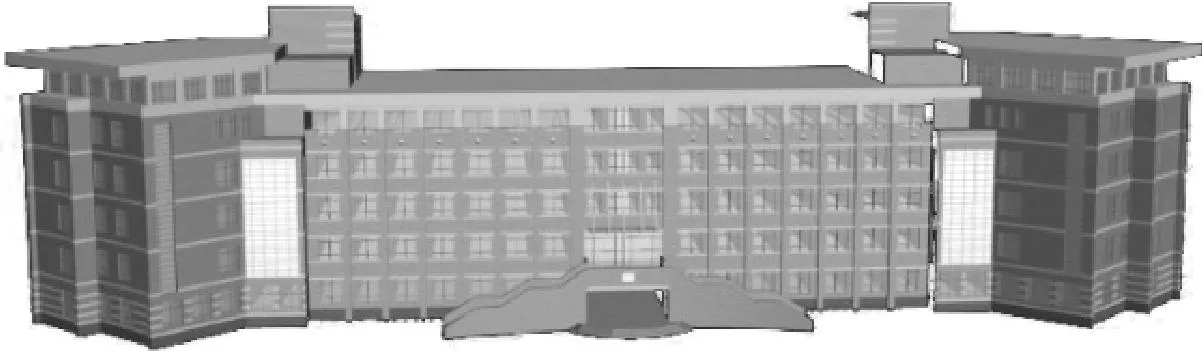
图6 调整后效果
建筑物模型与正射影像配准是三维场景重建的重要环节,在建筑物三维模型建立过程采取的方法是分割处理,完成独立建筑物三维模型之后进行场景合并。建筑物模型之间坐标系的统一在点云配准过程已经完成,独立建筑物模型的空间位置和相对位置关系已知,场景合并阶段只需考虑给模型添加真实背景,丰富场景细节,在场景中设置灯光模拟器,突出虚拟场景的细节特征,更好地突出视觉效果。将所有模型导入同一场景,统一不同模型的相同材质,统一渲染环境和灯光参数,选择合适的视觉方向反复调试渲染。其中,三维场景的正射影像如图7所示。建筑物模型、影像、其他地物等合并后的场景效果如图8所示。

图7 正射影像

图8 合并后效果
2. 建筑物模型精度分析
建筑物模型的误差主要有以下几个来源:点云数据采集误差、点云拼接误差和建模误差。建筑物是由一系列的几何体构成,如门、窗、立柱等,这些几何体会直接影响模型构建的质量。为了验证构建的建筑物模型能否达到较高的精度,本试验对比分析了模型中特征点的相对距离与全站仪测量的距离。分别选取两栋教学楼上的各10个特征点作为参考点,分为A、B两组,使用免棱镜全站仪测量特征点,建筑物模型和全站仪采集的特征点相对距离见表1。
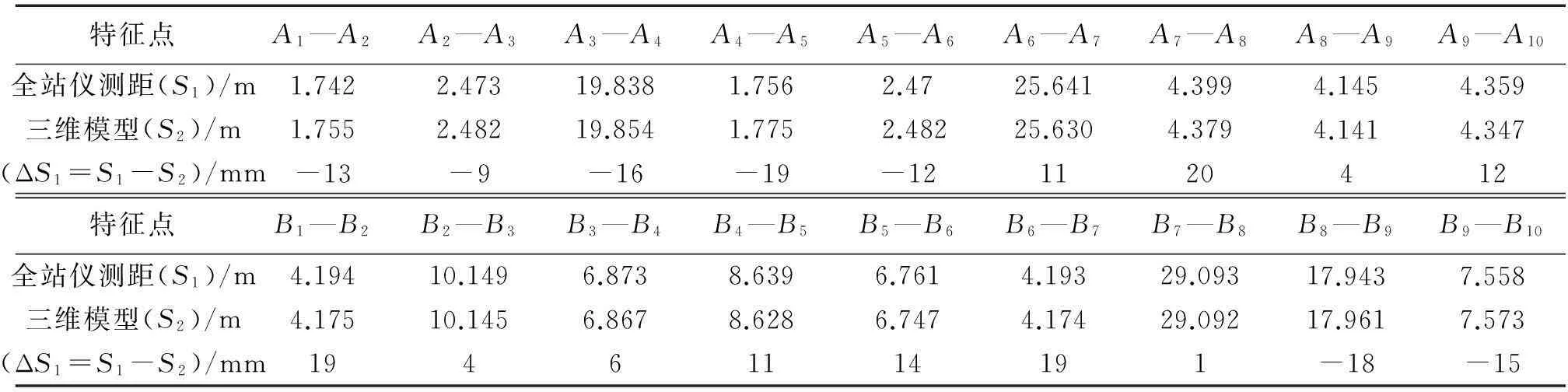
表1 全站仪测距与三维模型特征点距离对照分析

四、结束语
本文基于三维激光扫描数据和无人机影像,对小范围三维场景重建及快速更新问题进行了研究。探讨了三维场景重建的几个重要问题:建筑物模型重建、无人机影像几何纠正和建筑物模型与影像配准。对建筑物模型结构的相对位置与全站仪测量的分析比较,验证了基于三维激光扫描数据构建的建筑物模型能够满足精度要求。激光点云数据与无人机影像集成构建的三维场景可以提高真实感、丰富模型的几何细节及纹理细节、提高模型的几何精度。但激光点云与影像配准自动程度比较低,三维建筑物模型与二维影像配准技术仍不成熟,难以达到自动配准,无人机影像中建筑物边界自动提取和建筑物立面的配准将是日后研究的方向。点云数据与无人机影像集成时,如果配准精度较低,场景建设的目的就无法达到。同时,评价建筑物模型构建精度的方法还有待改进。
参考文献:
[1]张宏伟,赖百炼. 三维激光扫描技术特点及其应用前景[J]. 测绘通报,2012(S0):320-322.
[2]尹玉廷.地面3维激光扫描技术在古建筑保护中的应用研究[J].测绘与空间地理信息,2013,36(2):91-93.
[3]田宗建.3维激光扫描技术在测量中的应用[J].测绘与空间地理信息,2012,35(7):124-125,129.
[4]曹峰. 基于GIS数据自动生成城市三维模型的技术探讨[C]∥第九届长三角科技论坛 (测绘分论坛) 论文集.南京:苏、浙、沪测绘学会,2012.
[5]关鸿亮,江恒彪,曹天景,等.通过真正射影像快速构建三维建筑物场景的方法[J].测绘科学,2009,34(3):71-73.
[6]赵海莹,张正鹏.三维激光点云数据在城市建模中的应用[J].城市勘测,2009(1):69-72.
[7]李杰,周兴华,唐秋华,等.三维激光扫描技术在数字城市中的应用[J].海岸工程,2011,30(3):28-33.
[8]毛方儒,王磊.三维激光扫描测量技术[J].宇航计测技术,2005,25(2):1-6.
[9]李隆方,张著豪,邓晓丽,等.基于无人机影像的三维模型构建技术[J].测绘工程,2013,22(4):85-89.
[10]周晓敏,赵力彬,张新利.低空无人机影像处理技术及方法探讨[J].测绘与空间地理信息,2012,35(2):182-184.
[11]王健,靳奉祥,李云岭,等.三维激光扫描技术在城市三维数字景观建模中的应用[J].测绘通报,2008(S0):1-6.
[12]盛业华,张卡,张凯,等.地面三维激光扫描点云的多站数据无缝拼接[J].中国矿业大学学报,2010,39(2):233-237.
[13]熊友谊,冯志新,陈颖彪,等.利用点云数据进行三维可视化建模技术研究[J].测绘通报,2012(5):20-23.
[14]张亚.三维激光扫描技术在三维景观重建中的应用研究[D].西安:长安大学,2011.
[15]仇兵.面向三维激光扫描的真实感纹理映射技术研究[D].南京:南京理工大学,2009.
引文格式: 闫阳阳,李永强,王英杰,等. 三维激光点云联合无人机影像的三维场景重建研究[J].测绘通报,2016(1):84-87.DOI:10.13474/j.cnki.11-2246.2016.0021.
作者简介:闫阳阳(1990—),男,硕士生,主要研究方向为激光扫描数据处理。E-mail:yangzi0510@126.com
基金项目:国家自然科学基金(41001304);测绘地理信息公益性行业科研专项(201412020);国家“十二五”科技支撑计划(2012BAH34B)
收稿日期:2014-11-12
中图分类号:P234.4
文献标识码:B
文章编号:0494-0911(2016)01-0084-04
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21
黑龙江水利科技(2020年8期)2021-01-21
软件(2020年3期)2020-04-20
浙江国土资源(2019年10期)2019-10-31
小学生学习指导(低年级)(2019年9期)2019-09-25
建材发展导向(2019年10期)2019-08-24
摄影之友(影像视觉)(2018年12期)2019-01-28
中国公共安全(2017年7期)2017-10-13
Coco薇(2017年8期)2017-08-03
电子制作(2017年9期)2017-04-17
