基于DCT域的车标定位方法研究
2016-02-24 10:45李玉恵李全武
计算机技术与发展 2016年4期
潘 艺,李玉恵,杨 敏,李全武
(昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
基于DCT域的车标定位方法研究
潘 艺,李玉恵,杨 敏,李全武
(昆明理工大学 信息工程与自动化学院,云南 昆明 650500)
为了能够对高速公路视频中的违法车辆特征进行提取,需要完成车辆对象的目标检测和特征区域定位工作。在特征区域定位研究中,车标定位是很重要的工作,文中研究了一种直接在车脸图像DCT域中进行车标定位的方法。该方法首先使用Adaboost算法对高速公路视频中的车辆对象进行车脸区域的定位,得到感兴趣的车脸区域图像,然后利用车脸图像中车标纹理和散热器隔栏纹理所具有的不同方向性特点,直接在DCT域中提取车标的横向、竖向、斜向纹理的方向信息,通过区别于散热器隔栏只有横、竖向纹理的特性,采用阈值方法把车标区域从车脸图像背景中分割出来,从而定位到车标区域。实验采用大量不同车标的车辆图片进行处理,结果表明,该算法处理速度较快,且可以有效实现车脸区域的车标定位。
车脸;DCT域;车标定位;纹理;Adaboost
0 引 言
车牌无法识别的车辆对象识别在智能交通领域是一个难点问题。车标识别是车辆识别技术中一个重要的研究方向,车标识别技术包括车标定位和车标识别两项关键技术。车标定位是车标识别的第一步,只有准确地将车标定位,才能进行目标车辆的车标识别,否则会导致车标识别错误甚至无法识别。
目前车标定位已提出了很多研究方法[1-4]。这些方法主要有两大类:一种是基于车标纹理的定位方法,例如李贵俊等[5]提出的基于边缘检测与形态学滤波的车标对象检测方法。该方法是先根据先验知识来对车标进行粗定位,然后通过该区域的车标背景纹理的检测来定位车标。另一种是依据车标区域所在位置的结构性特点的研究方法,例如肖飞等[6]提出的基于车辆局部对称性的车标检测定位方法。该方法首先利用垂直间隔差分和水平最大局部投影的方法定位图像中的车牌和车灯区域,运用先验知识对车标进行粗定位,然后根据车头的对称性原理和差分水平投影来定位到车标。但这些方法基本上都是在特定图像中进行操作的,在车道背景复杂的环境下不能进行快速处理,同时,车辆的散热隔栏器大多是横竖纹理,而且车标的纹理大多比较复杂,还有斜向纹理等,因此,如何区分散热隔栏器和车标是一个难点[7-8]。
文中以车辆的引擎盖下沿,车牌的上沿,包含车标、车灯及散热器隔栏的矩形区域作为车脸。针对上述问题,文中提出了一种直接在DCT域进行车标定位的方法。该方法先对车辆对象进行车脸区域的定位,然后直接在车脸区域的DCT域提取车标区的纹理特征,充分利用了DCT域数据的特点,因而处理速度大大加快。
1 Adaboost车脸定位
1.1 Adaboost算法原理
Adaboost[9-11]本质是一种迭代算法,其中心原理是用同一个训练集来训练不同的分类器(弱分类器),然后将这些弱分类器通过集合构成一个更强的最终分类器(强分类器),最后将强分类器组合起来,使之成为一个级联分类器。Adaboost的基本算法步骤如下:
假设输入的N个训练样本是:{x1,y1},{x2,y2},…,{xN,yN}。其中xi是输入的训练样本,yi=0,1分别指的是负样本、正样本。若已知在训练样本中,负样本和正样本的个数分别为m,n,那么第j个特征所生成弱分类器表示为:
(1)
1)权重系数的初始化。
2)对每一个t=1,2,…,T(T为弱分类器的个数):

(3)按照这个最佳弱分类器,调整权重:
(2)

3)最后的强分类器为:
(3)
在Adaboost算法中,训练分类器关键在于样本。文中的正样本指的是待检测的车脸样本,负样本指待识别图像的场景中其他非车脸的任意图片,所有的样本图像都被归一化为统一尺寸。
1.2 Adaboost车脸定位方法
文中样本图像来自不同交通卡口的5 000幅车辆图片。其中,3 600幅图片的车脸区域通过手动截取来作为输入的正样本,同时在交通道路场景下截取的负样本为5 200幅。文中将正负样本通过Adaboost算法进行样本训练,从而得到一个级联分类器,然后将待检测的1 400幅车辆图像利用该分类器进行车脸区域的检测。部分正样本和车脸定位的结果如图1和图2所示。

图1 部分车脸正样本图像

图2 检测出的车脸矩形框
实验结果表明,正确定位到车脸区域的有1 258幅图片,正确检测率为89.86%。
2 DCT域的车标定位
2.1 DCT域的频域特性
由DCT域的频域特性可知,利用Adaboost算法定位的车脸图像经过DCT变换后,其系数位置以及幅值反映的是该变换图像当中的空间频率及其能量[12-14]。本节将图像划分为8*8的子块y[i,j](0≤i,j<8),经过DCT变换,可以得到64个系数Y[u,v](0≤u,v<8),该系数反映的是该图像子块的频率能量及其分布情况。
(4)

对系数值进行量化是编码过程中的一个步骤。这里将8*8的DCT系数划分为a,b,c,d共4个区域,那么每个区域表示纹理方向是不同的。a代表直流分量,是子块的平均值;b代表竖向的纹理,是水平方向的频率变化;c代表斜向的纹理,也就是指斜向方向的频率变化;d表示横向的纹理,即竖直方向的频率变化。DCT块4个区域的具体位置如图3所示。
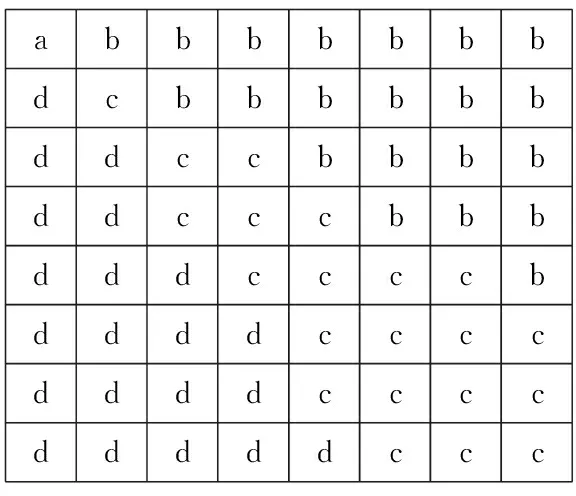
abbbbbbbdcbbbbbbddccbbbbddcccbbbdddccccbddddccccddddccccdddddccc
图3DCT块4个区域的具体位置
2.2 车标的频域特性
根据车标的线条结构特点,按照统计特性可以将其归为竖向、斜向和横向的线条组合。在提取出的车脸图像中可以看出,车标线条的边缘变化剧烈,与其背景具有明显差异,同时,车标的线条结构也具有明显的竖向、斜向和横向等纹理特征。如图3所示,车标的竖向线条的变换系数主要集中在b区,而斜向线条则主要是集中在c区,同时b区与d区也存在一定分布,横向线条的变换系数则主要集中在d区。因此,由于车标的特殊性结构,在DCT域中能够表现出非常丰富的中高频DCT分量以及明显的方向性信息。
因此,在实验中,只考虑每个DCT块中的b、c、d区的中高频部分,对每个区域求其能量值,b、c、d区的能量值分别代表的是竖向、斜向、横向纹理的频率变化程度,并将其分别作为车标的竖向、斜向、横向纹理特征来检测车标区域。3个区域的能量表达式分别为:
(5)
(6)
(7)
式中:Y(i,j)表示DCT系数值;Eh,Ex,Ev分别表示水平、斜向、竖直方向的频率变化能量值;Ω1,Ω2,Ω3分别表示各方向的频率系数所在区域,是可调的动态参数。
实验中采用的区域如图4所示。

bbbbbbbbbbcbbbbddcccbbbdddccccbddddccccddddccccdddddccc
图4 实验中采用的DCT系数区域
2.3 DCT域的车标定位方法
文中利用基于Adaboost算法的车脸定位后的车脸图片。图5(a)是一幅经过车脸定位后的原始图,为了定位其车标区域,首先对车脸图像进行DCT变换,接着计算出每个DCT子块的能量值,即Eh和Ev,根据各自设定的阈值Th、Tv进行初选,选出竖向、横向纹理区域,初选的结果如图5(b)所示。然后运用形态滤波方法去掉初选结果中存在的单个噪音点,最后用闭运算来填补候选区域的空隙,经过处理后的结果如图5(c)所示。

图5 车标定位过程
接下来就是要排除车标区域。根据之前分析可知,车标线条在统计意义上具有一定的斜向能量,而车脸其他区域如车灯、散热器隔栏等都几乎没有斜向能量,因此,可以用斜向能量来排除非车标区域,但并不是车标线条的每一处都具有斜向能量,所以这里采用平均斜向能量来度量。

(8)
最后,用Tx作为阈值进行进一步的筛选,把满足条件的所有Dt(0≤t≤M)确定为真正的车标区域,而对于车标区域,则用能包含这个区域的最小矩形框来表示,结果分别如图5(d)、(e)所示。
3 实验结果与分析
为了验证文中车标区域定位方法是否有效,这里对车脸定位后的1 258幅车脸图像进行了实验。实验中采用的统一阈值为Th=Tv=420,Tx=330,统计结果见表1。
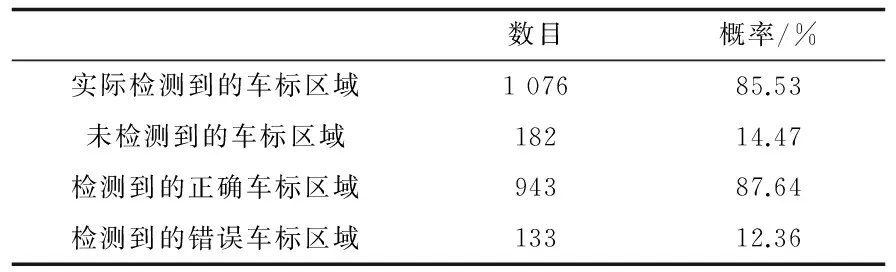
表1 检测结果
根据表1可见,车标定位结果存在误判和漏判。引起误判的主要原因是车标斜向纹理表现不明显,并且车辆散热隔栏器具有跟车标相似的横竖纹理,如图6上图所示;而引起漏判的主要原因是车标的亮度比背景亮度低很多,又不满足上述规定的阈值,则车标区域定位失败,如图6下图所示。但如果降低阈值又容易产生误判,因此,采用自适应阈值的方法将是下一步的研究方向。

图6 误判和漏判结果
4 结束语
针对交通道路环境下车标快速定位的问题,文中先采用Adaboost算法对车辆对象进行车脸区域的定位,减少道路背景以及车辆对象非车脸区域的纹理影响,然后直接在车脸区域的DCT域提取车标区域的纹理特征,利用车标具有的斜向纹理特征来区别于车脸区域的其他背景部分,从而达到定位车标的目的,充分用了DCT域数据的特点。实验证明,该方法能够有效地实现车标区域的定位,为交通卡口抓拍的车牌无法识别车辆的车标识别提供了一种新思路。
[1]WangY,LiuZ,XiaoF.Afastcoarse-to-finevehiclelogodetectionandrecognitionmethod[C]//ProcofIEEEinternationalconferenceonroboticsandbiomimetics.[s.l.]:IEEE,2007:691-696.
[2]LiuYang,LiShutao.Avehiclelogolocationapproachbasedonedgedetectionandprojection[C]//ProcofIEEEinternationalconferenceonvehicularelectronicsandsafety.[s.l.]:IEEE,2011:165-168.
[3] 李 玲.车标定位方法研究[D].大连:辽宁师范大学,2009.
[4] 李红林,王运琼.基于差分与对称性检测相结合的车标定位方法[J].曲靖师范学院学报,2008,27(6):68-71.
[5] 李贵俊,刘正熙,游志胜,等.一种基于熵增强和自适应形态学滤波的快速车标定位方法[C]//第三届信号与信息处理全国联合学术会议论文集.出版地不详:出版者不详,2004.
[6] 肖 飞,王运琼,刘丽梅,等.基于局部对称性特征的快速车标定位[J].计算机科学,2010,37(2):298-300.
[7] 马 蓓,张 乐.基于纹理特征的汽车车型识别[J].电子科技,2010,23(2):94-97.
[8] 李欣昊.智能交通系统中车辆检测关键技术研究[D].长春:吉林大学,2011.
[9]FreundY,SchapireRE.Adecision-theoreticgeneralizationofon-linelearningandanapplicationtoboosting[J].JournalofComputerandSystemSciences,1997,55(1):119-139.
[10]SchapireRE,SingerY.Improvedboostingalgorithmsusingconfidence-ratedpredictions[J].MachineLearning,1999,37(3):297-336.
[11] 李全武,李玉惠,李 勃,等.车脸定位及识别方法研究[J].计算机科学与探索,2015,9(6):726-733.
[12]ChiptrasertB,RaoKR.Discretecosinetransformfiltering[J].SignalProcessing,1990,19(3):233-245.
[13]RamssubramamianD,VenkateshYV.EncodingandrecognitionoffacesbasedonthehumanvisualmodelandDCT[J].PatternRecognition,2001,34(12):2447-2458.
[14] 黄祥林,沈兰荪.基于DCT压缩域的图象字符定位[J].中国图象图形学报,2002,7(1):22-26.
Research on Vehicle Logo Localization Method Based on DCT Domain
PAN Yi,LI Yu-hui,YANG Min,LI Quan-wu
(Faculty of Information Engineering and Automation,Kunming University of Science and Technology, Kunming 650500,China)
In order to extract illegal vehicles’ feature in highway video,the target detection of vehicle objects and the localization of characteristics areas need to be completed.In the work of characteristics areas localization,vehicle logo localization is a very important work.A new approach is proposed for vehicle logo localization directly in DCT domain of face image.Firstly adaptive boosting (Adaboost) algorithm is used to locate the vehicle face region of vehicle objects and the vehicle face images could be gained.Secondly the vehicle logo’s horizontal,vertical,and diagonal texture information in the DCT domain are extracted by the different directional characteristics between vehicle logo’s and radiator grille’s texture in vehicle face images,then threshold method is used to divide the vehicle logo region out of the background image which could rule out the radiator grille’s horizontal,vertical texture information.A large number of vehicle images with different logos are used for experiments,and the results show that the processing speed is faster,and the algorithm can effectively achieve the vehicle logo localization of vehicle face region.
vehicle face;DCT domain;vehicle logo localization;textural features;Adaboost
2015-07-03
2015-10-15
时间:2016-03-22
国家自然科学基金资助项目(61363043)
潘 艺(1990-),女,硕士研究生,研究方向为智能计算、图像处理;李玉惠,教授,硕士生导师,研究方向为嵌入式系统、图像处理、射频识别系统的研究与开发。
http://www.cnki.net/kcms/detail/61.1450.TP.20160322.1519.048.html
TP391
A
1673-629X(2016)04-0070-04
10.3969/j.issn.1673-629X.2016.04.015
猜你喜欢
世界汽车(2022年3期)2022-05-23
软件(2020年3期)2020-04-20
军事文摘·科学少年(2020年3期)2020-03-26
动漫界·幼教365(中班)(2019年3期)2019-06-11
摄影之友(影像视觉)(2018年12期)2019-01-28
Coco薇(2017年8期)2017-08-03
故事作文·低年级(2016年11期)2016-11-29
小学教学研究·新小读者(2016年7期)2016-07-15
Coco薇(2015年5期)2016-03-29
学生天地·初中(2014年9期)2014-10-17