单船港内首尾双锚锚泊允许波高的试验研究
2016-02-23 05:28孙一艳陈国强李金宣
水道港口 2016年3期
孙一艳,王 刚,陈国强,李金宣,郑 玮
(1.中国水产科学研究院渔业工程研究所,北京100125;2.大连理工大学海岸和近海工程国家重点实验室,大连116024)
单船港内首尾双锚锚泊允许波高的试验研究
孙一艳1,王 刚1,陈国强1,李金宣2,郑 玮2
(1.中国水产科学研究院渔业工程研究所,北京100125;2.大连理工大学海岸和近海工程国家重点实验室,大连116024)
目前我国渔港港内锚地允许波高的规定是参照国外规定按经验确定,缺乏有效的试验支撑。为了验证现行规定的港内锚地允许波高的合理性,以275HP拖网渔船为代表船型进行了单船首尾双锚锚泊的物理模型试验,研究了渔船首尾双锚锚泊系统在不规则波作用下的锚泊力及运动量的情况,分析了波浪入射角度、渔船载况、波高及周期对锚泊力和运动量的影响。实验结果表明,锚泊力在90°横浪作用时最大,随着载重和波高的增大而增大,随着周期的增大而减小。横摇角度同样在90°横浪作用时最大,随着载重的增大而减小,随着波高的增大而增大;当波浪周期接近渔船横摇周期时,横摇角度达到最大,随后随着周期的增大而减小。试验结果得出,在本次试验范围内,此渔船单船首尾双锚锚泊时的允许有效波高建议取为0.7m。研究结果为港内锚泊允许波高的确定以及渔船缆绳的设计提供了有效的支持。
允许波高;275HP拖网渔船;首尾双锚锚泊;物理模型试验;锚泊力;运动量
渔港是海洋捕捞与沿岸增养殖渔业的重要基地,是沿海防灾减灾体系的重要组成部分,是渔民生产、生活的重要场所[1]。渔船是渔民生存的必要工具,海洋捕捞不可替代的载体,只有发展好渔船、保护好渔船才能保证海洋捕捞的高效和安全,保证渔民生活的稳定。而海上风浪流是威胁渔船安全的主要因素,2012年,由于台风、洪涝等自然灾害造成全国沉船共874艘,船损达到4 333艘[2];2013年造成沉船847艘,船损达到4 653艘[3]。因此,开展风浪流对渔船的作用研究是很有必要的。
有效掩护水域面积是沿海渔港建设标准最重要的指标之一,是影响单个渔港投资规模的核心因素,而渔船港内锚泊泊稳条件是科学计算有效掩护水域面积的依据。渔船港内泊稳分为作业泊稳和锚泊泊稳,栾曙光等[4]通过试验手段,对渔港作业泊稳进行了研究。目前国内外对船舶锚泊的研究主要集中在锚泊安全和设备[5-8]、锚链张力数值分析[9-10]等方面,而未看到有关对锚泊船只受力和运动情况的试验研究。Kenji[11]等对单点锚泊船只在风浪作用下的纵荡、横荡和首尾摇进行了数值模拟,重点分析了其走锚的情况,但对其它方向的船舶运动没有进行研究。
目前我国渔港港内锚地允许波高的规定都是参照国外类似规定按照经验而确定的,缺乏试验支撑。“十一五”期间,我国渔港港内锚地水域的允许波高按50 a一遇有效波高(H1/3)小于1.0 m规定;“十二五”期间,我国渔港港内锚地水域的允许波高按照50 a一遇,设计高水位情况下,H1%波高小于1.0 m规定。孙龙等[12]对现行的允许波高进行了比较分析,但缺乏试验验证。
中国水产科学研究院渔业工程研究所承担了由国家住建部下达的《沿海渔港建设标准》的编制任务,为了给标准的编制提供可靠的数据支持,同时为了验证“十二五”期间我国渔港港内规定的锚泊允许波高是否合理,本文以275HP拖网渔船为代表船型,以横摇角度为控制因素(超过临界角度,渔船会发生进水),对单船首尾双锚锚泊泊稳条件进行了物理模型试验,同时,研究了此渔船首尾双锚时锚泊力及运动量受不规则波作用的情况,既验证了港内锚泊允许波高,又对后续风浪流联合作用的研究奠定了基础。
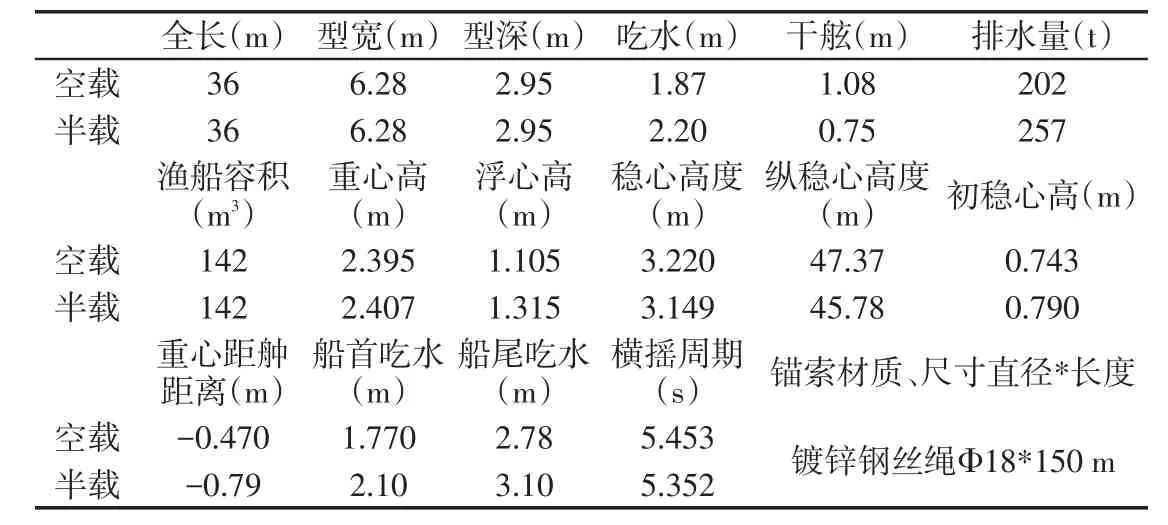
表1 渔船原型资料Tab.1 Prototype data of the fishing boat
1 试验概况
1.1 船型资料
本次试验以275HP拖网渔船为代表船型,中国水产科学研究院渔业机械研究所提供了渔船船型资料,具体如表1所示,其中空载指渔船在港内空载锚泊状态,半载指渔船补给后满载出港状态。
图1为275HP拖网渔船原型船的总布置图及与模型船的对比,图中粗实线为简化后的模型上部尺寸。为了防止模型上水对模型和测量仪器造成损坏,同时由于制作工艺等原因,在船模制作时将最低点处的干舷高度升高了1.77 m,模型尺寸相当于升高了0.098 m,经过验证,此项调整并没有改变渔船本身的横摇周期等动力特性,根据调整后制作的模型如图2所示。图3分别给出了空载和半载时原型船和模型船的临界进水角度,即渔船由于转动导致干舷与水面齐平时的角度,当此角度继续增大,干舷低于水面时则会发生渔船进水。从图中可以看到,原型船在船身倾斜约19°左右(空载)和13°左右(半载)时就会发生进水,因此按照此渔船的临界入水角为19°(空载)和13°(半载)考虑。
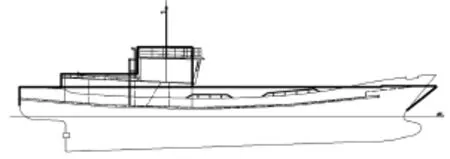
图1 原型船和模型船对比尺寸图Fig.1 Size comparison of prototype ship and model ship

图2模型船Fig.2 Model ship
1.2 模型设计
模型试验是在大连理工大学海岸及近海工程国家重点实验室的三维波浪水池内进行的。试验水池长40 m,宽24 m,深1.2 m,最大工作水深可达到0.7 m,最大波高可达到0.30 m。水池一侧装有自行设计制造的多向不规则波造波机,由70块宽为0.33 m的造波板组成。试验现场布置及模型平面布置如图4所示。
在模型设计中,根据《波浪模型试验规程》[13],采用正态模型,主要根据重力相似准则进行模型设计,同时综合考虑试验水池、试验船舶及试验内容等情况,选取模型比尺λL=18。模型制作首先要保证渔船外形的几何相似;重量相似方面,船模重量除船模空壳外,不足部分用铁块压载使船重满足不同载重时所要求的重量;最后通过调整船体内压载铁块的位置使其满足船模的重心、惯量和横摇周期等动力相似要求。
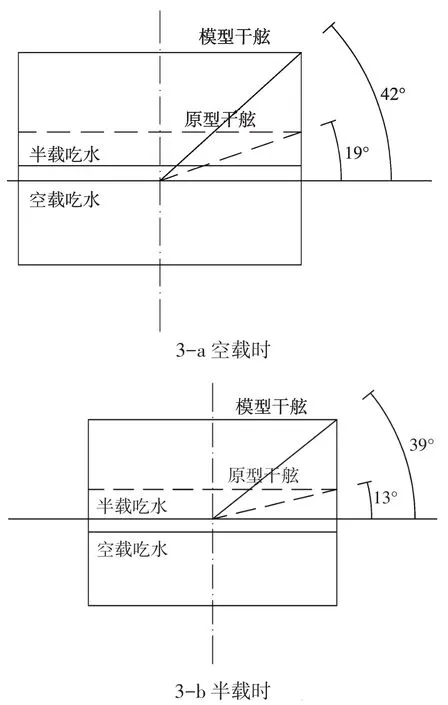
图3 90°横浪作用时原型和模型的临界入水角度Fig.3 Critical water entry angle of prototype ship and model ship with 90 degree transverse wave
锚系结构的模型与原型间应满足长度相似,重量相似以及弹性相似。由于试验所用缆绳模型的弹性通常难以满足需要,常依据原型换算所求弹性系数,配置弹性系数分布范围相近的弹簧进行串、并联等组合形式与模型缆绳连接实现弹性模拟。表2给出了模型缆绳的相关特性参数[14]。图5为锚系结构的布置图,图6-a和6-b分别为锚索与模型船和地面的连接图,首尾锚索固定于船舶首尾甲板中心边缘位置,图中拉力计用来测量模型在波浪作用下受到的拉力,弹簧则是为了满足锚索的弹性模量,使其与原型锚链保持弹性相似。
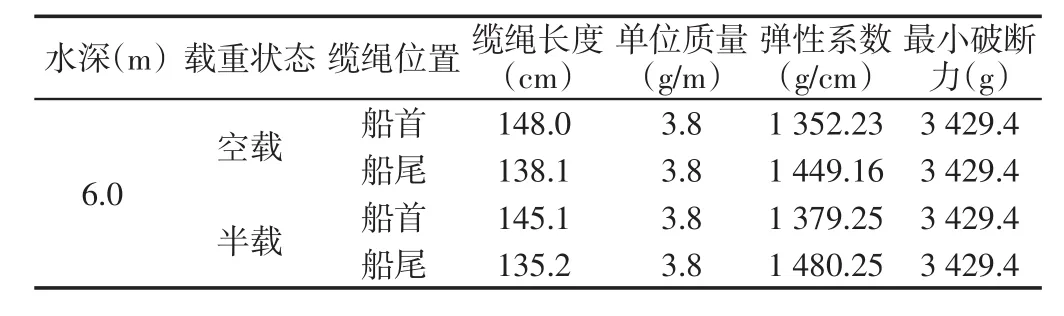
表2 模型缆绳特性参数Tab.2 Characteristic parameters of cable model
船舶的运动量主要包括6个方面,三个方向的位移:横荡、纵荡、垂荡;三个方向的转角:横摇、纵摇、首尾摇。图7给出了用于测量六个方向运动的非接触式运动姿态测量系统示意图,其原理是采用双目视觉系统对于船舶实时定位,从而可以确定船舶的姿态并计算其六个方向的运动量,图8给出了不同方向的波浪作用时船运动六个分量与XYZ坐标系之间的关系。

图4 试验布置Fig.4 Layout of the experiment
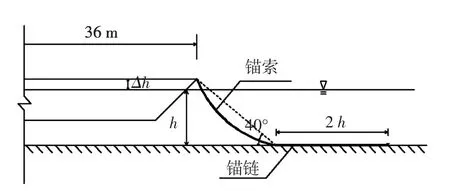
图5 锚系结构示意图Fig.5 Layout of mooring structure
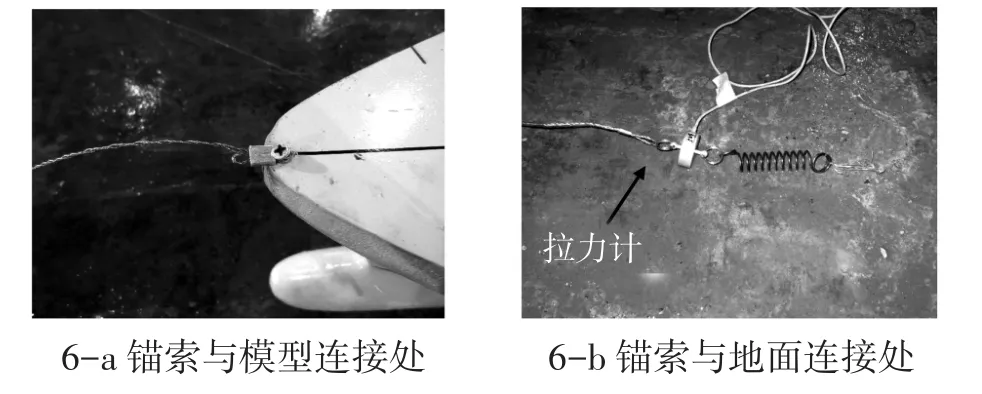
图6 锚索布置图Fig.6 Layout of mooring chain
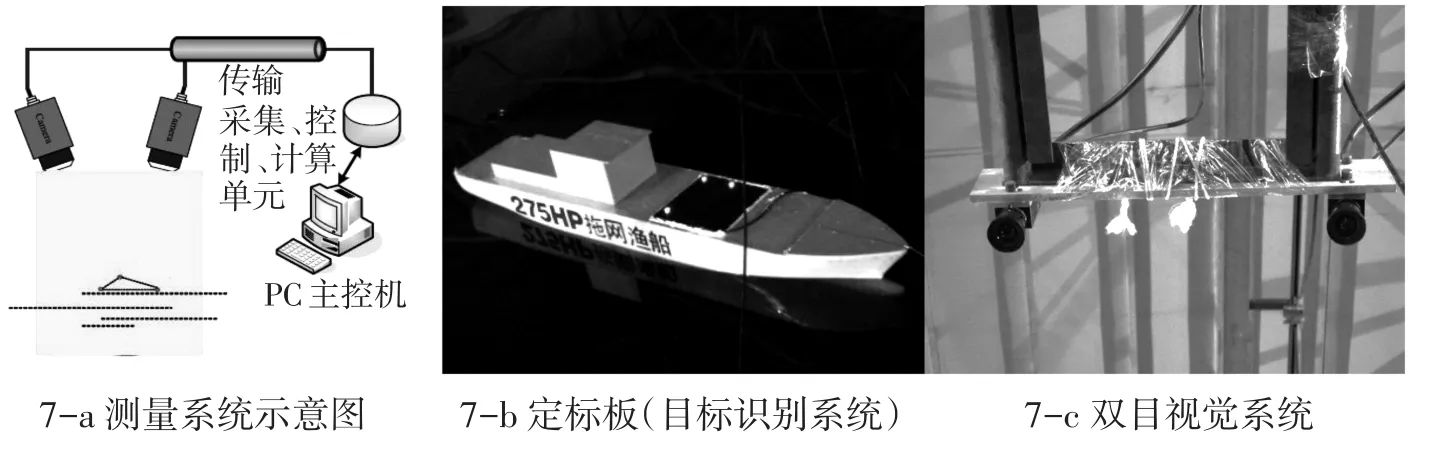
图7 非接触式运动姿态量测系统Fig.7 Untouched 6⁃Dof Measurement System
1.3 试验参数
本文试验波浪主要采用不规则波,波浪的频谱采用合田改进的JONSWAP谱[15],考虑我国近岸波浪的主要风浪周期一般集中在5~7 s附近,同时参照国外定义的港内允许波高为最大波高小于1.0 m,确定原型的波浪参数如下:
(1)水深:6 m;
(2)载况:空载、半载;
(3)波浪入射方向:90°,45°,0°;
(4)有效波高:H13%=0.65 m、0.8 m、1.0 m、1.2 m;
(5)周期:T=4 s(除1.2 m波高半载情况)、5 s、6 s、7 s、8 s。
试验中时间采样间隔为0.02 s,采样长度为8 192个,波浪统计分析采用上跨零点法,每次试验重复2~3次,试验结果采用前三个大值的平均值为统计值进行分析。
2 试验结果分析
2.1 首尾拉力及运动量时间过程线
由于港内渔船失稳主要以船舶摇动过大进水或断缆走锚为主,因此本文主要分析缆绳的拉力和渔船转动。以6 m水深,空载情况,有效波高1.0 m,周期5 s时结果为例,分别给出90°、45°和0°波浪作用时渔船的首尾拉力及三个方向转角的时间过程如图9和图10。从图中可以看到,受船舶运动的影响,首尾缆的拉力不是一个连续的过程,拉力的大小取决于船舶的运动状态,同时90°浪作用下的渔船首尾拉力及横摇角度最大,45°次之,0°最小。
表3给出了不同波浪入射角度时的波浪试验情况,综合图表认为,单船首尾双锚锚泊时主要以渔船首尾拉力、横摇角度(90°)为控制因素,即为本次研究的主要对象。
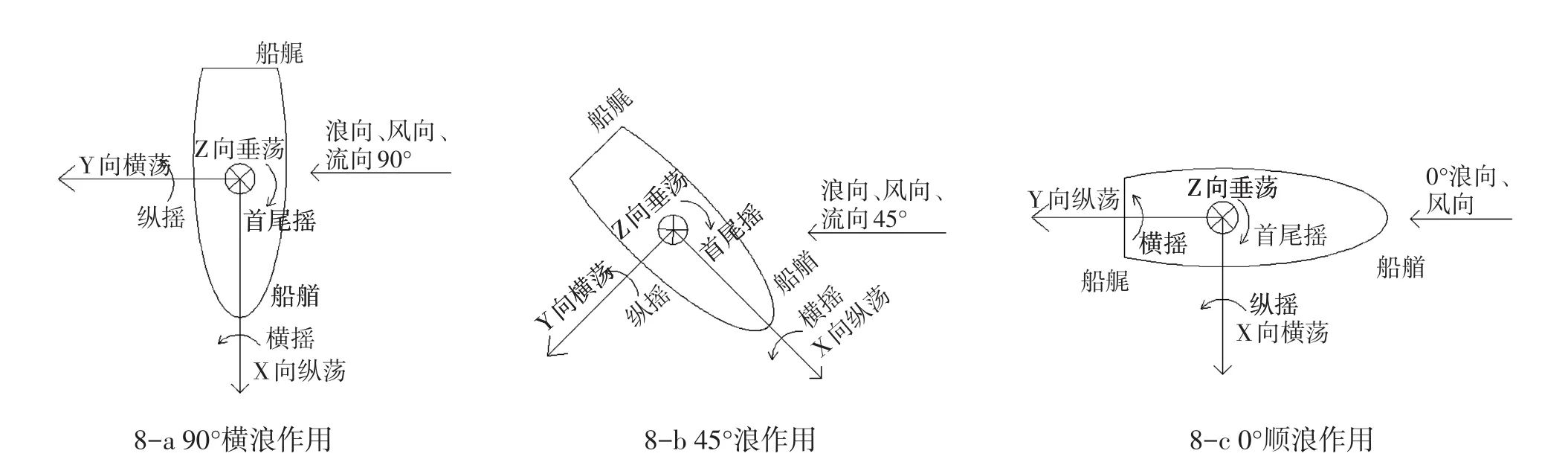
图8 船运动六分量定义Fig.8 Definition of ship 6⁃DOF motions
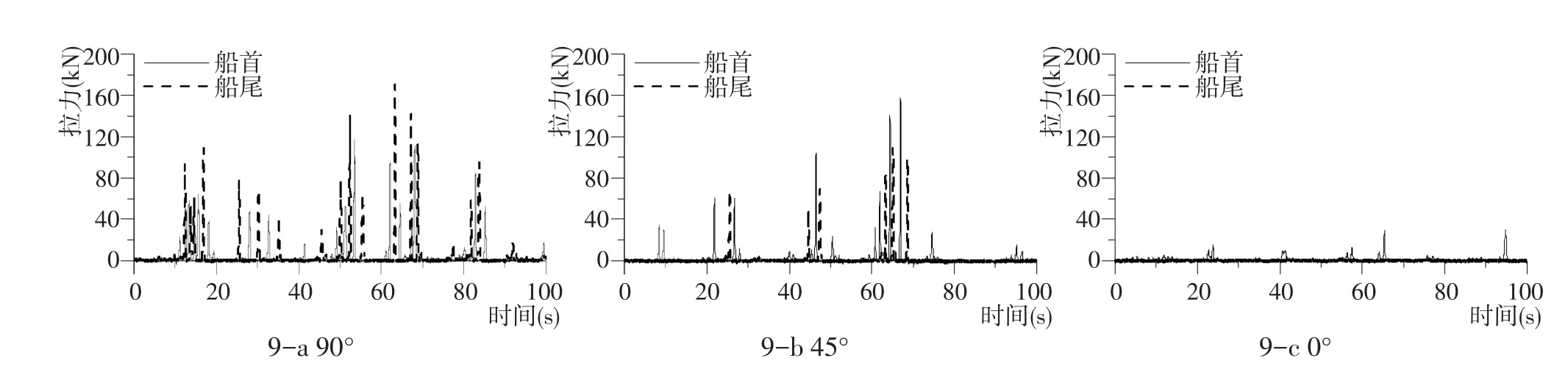
图9 不同波浪入射方向时首尾拉力图Fig.9 Bow⁃stern tension force with different incident wave direction
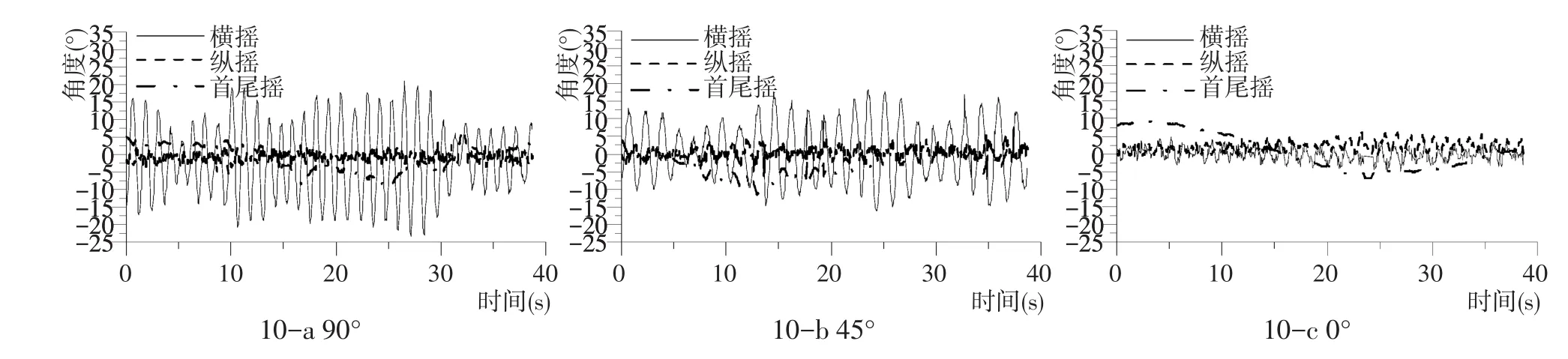
图10 不同波浪入射方向时转角图Fig.10 Angle of rotation of different incident wave direction
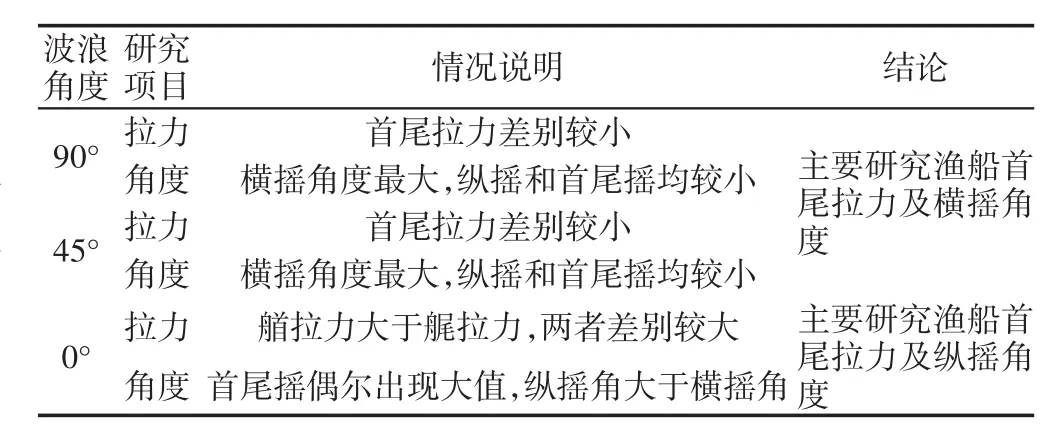
表3 不同波浪入射角度时渔船拉力和运动的情况说明Tab.3 Description on the tension force and movement of fishingboat with different incident wave angles
2.2 波浪入射角度和载况的影响
图11给出了T=5 s、不同大小波浪作用时,渔船首尾拉力及横摇角度统计值随入射角度的变化情况(0°时给出的是纵摇角度),从图中可以看到,90°横浪作用时不论是渔船首尾拉力还是横摇角度都略大于其它波浪入射方向的情况。因此随后主要给出控制状况90°横浪方向的研究结果,其余角度的详细数据可查询相关资料[14]。
为了研究渔船首尾拉力及横摇角度在不同载况情况下的变化情况,图12给出了不同波高下渔船在半载和空载两种载况下的首尾拉力随周期的变化情况。从图中可以看到,半载时渔船拉力略大于空载情况,且随着波高的增大,两种载况间拉力的差别逐渐减小。图13为相应情况下渔船横摇角度的变化趋势,可以看到半载时的横摇角度略小于空载时的角度。综合前述的拉力结果,可以看出,载重越大,锚泊锚索的拉力越大,断缆的可能性增大;但渔船的横摇角度会较小,渔船自身运动偏于安全。由于现实中港内锚泊的渔船多为空载锚泊,因此后面的研究均基于空载状态下进行。
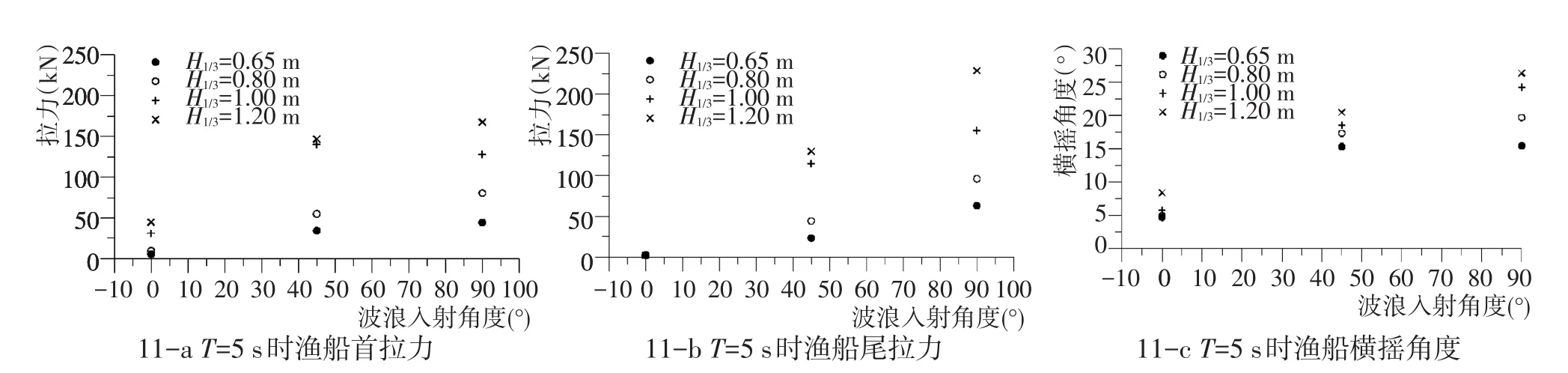
图11 渔船拉力及横摇角度在不同波浪入射角度时的比较Fig.11 Comparison of the tension force and rolling angle of fishing boat with different incident wave angles
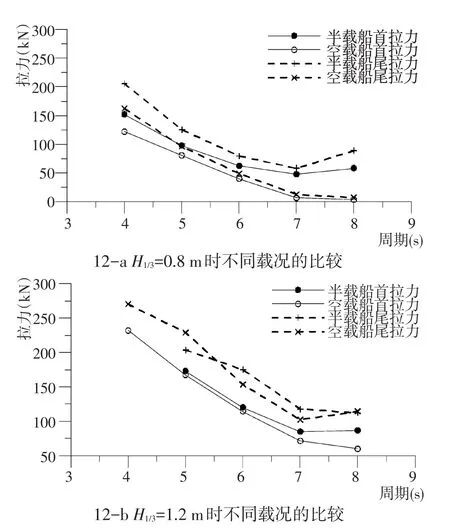
图12 不同有效波高时渔船首尾拉力在半载和空载情况下的比较Fig.12 Comparison of the bow⁃stern tension force of fishing boat in the half load and no⁃load conditions with different significant wave height
2.3 波高和周期的影响
为了说明波高和周期对首尾拉力及横摇角度的影响,图14给出了90°浪作用时渔船首尾拉力及横摇角度随有效波高和周期的变化趋势,从图中可以看到,90°横浪作用时,渔船首尾拉力随着波高的增大而增大,同时随着周期的增大而减小;渔船的横摇角度同样随着波高的增大而增大,在波浪周期接近渔船横摇周期(5 s)时,渔船与波浪发生共振,横摇角度达到最大,随后随着周期的增大而减小。但是由拉力图可以看出,首缆拉力及尾缆拉力却是在波周期4 s时候最大,其原因是由于船舶为首尾缆系泊,船舶横摇在周期5 s时发生共振现象,但横摇运动对于缆绳的拉力影响较小,另外通过对拉力能量谱和横摇角度能量谱的分析可以得到[14],拉力的能量主要集中在低频部分频率范围较大,即总拉力主要由许多低频拉力构成;而横摇角度的能量主要集中在5 s周期的频率范围内,与波浪的能量分布一致,因此横摇角度在波浪周期接近渔船横摇周期时发生共振,而拉力则不存在这个问题。
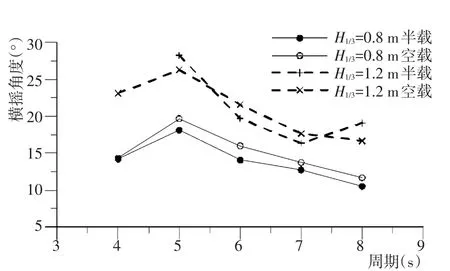
图13 不同有效波高时渔船横摇角度在半载和空载情况下的比较Fig.13 Comparison of the rolling angle of fishing boat in the half load and no⁃load conditions with different significant wave height
2.4 港内锚泊允许波高值分析
通过之前对时间过程线以及波浪入射角度、载况、波高和周期对于缆绳拉力和船舶运动影响的分析,得出空载、90°横浪作用为渔船安全锚泊的控制工况,选取横摇角度作为安全锚泊的控制参数,在渔船达到图3所示的临界入水角时所作用的波高即为此情况的允许波高值。这里不采用锚泊力为控制条件,因为锚泊力可以通过加强锚索、加大锚链重量或锚重及其它措施来避免走锚断锚的发生。表4给出了90°横浪作用、渔船空载时的渔船试验结果,其中的拉力值为首尾拉力中偏大的值。从表中可以看到,在本次试验研究范围内,当港内波浪的主要周期集中在渔船横摇周期5 s附近时,港内锚泊允许的有效波高应低于0.8 m;当港内波浪的主要周期集中在6 s或7 s或8 s时,允许的有效波高逐渐增大。综合各组次试验结果,针对本次试验条件,此275HP拖网渔船在港内锚泊的允许有效波高值按线性插值计算,插值得到的有效波高约为0.75 m,考虑适当的安全富裕,建议取为0.7 m,换算成最大波高约为1.0 m[12]左右,与“十二五”期间我国港内锚地规定的允许波高值基本一致。
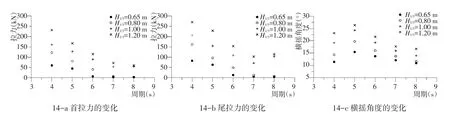
图14 90°浪作用下渔船拉力及横摇角度随有效波高和周期的变化Fig.14 Changes of the tension force and rolling angle of fishing boat with significant wave height and period with 90 degree transverse wave
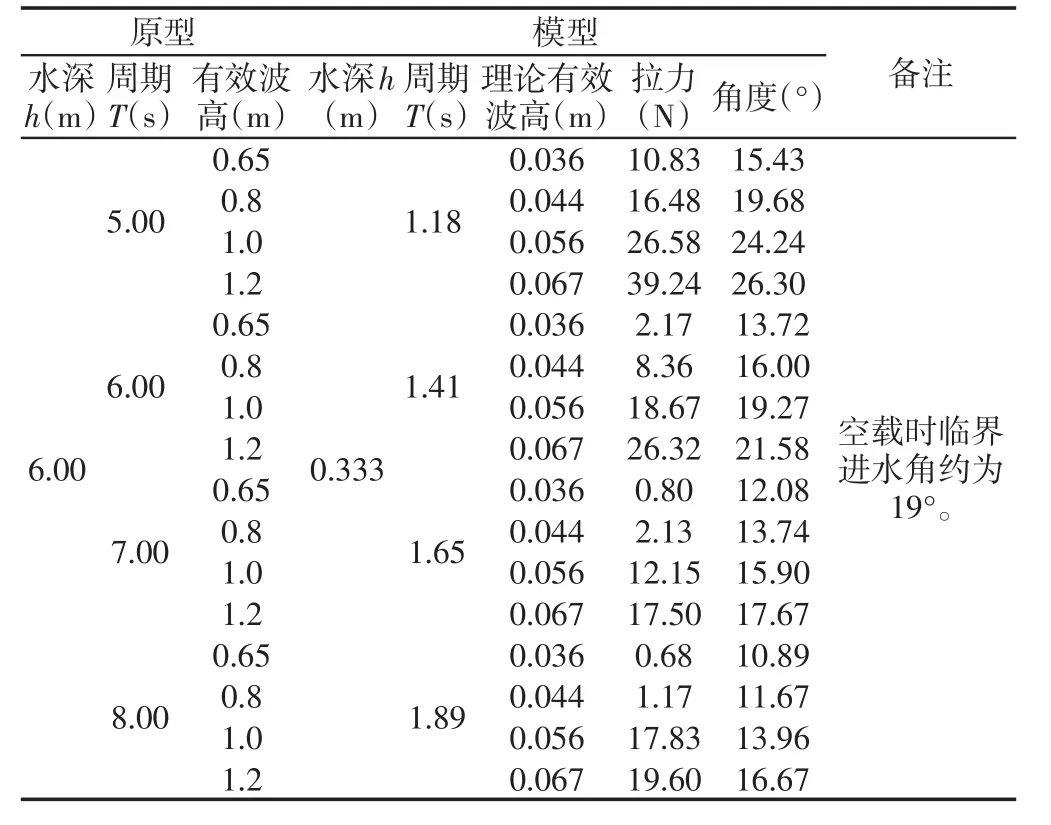
表4 渔船试验结果Tab.4 Experiment results of fishing boat
3 结果和讨论
对275HP拖网渔船港内首尾双锚锚泊情况进行了不规则波作用的物理模型试验,得出了以下结论,可为相关研究及标准制定提供参考:
(1)考虑实际渔船锚泊多以横摇过大渔船进水而失稳,同时为渔船缆绳设计提供参考,确定以渔船首尾拉力及横摇角度为主要研究对象。
(2)载况和波浪入射角度对渔船首尾拉力及横摇角度的影响:载重越大,锚泊力越大,但此时渔船的横摇角度偏小,渔船自身运动偏于安全。在三个波浪入射方向中,90°横浪工况作用得到的渔船拉力和横摇角度均大于其它角度。综合考虑,确定空载、90°横浪作用为渔船安全锚泊的控制工况,横摇角度为控制参数。
(3)波高周期对渔船首尾拉力及横摇角度的影响:90°横浪作用时渔船首尾拉力随着波高的增大而增大,同时随着周期的增大而减小;渔船的横摇角度同样随着波高的增大而增大,波浪周期接近渔船横摇周期时,横摇角度达到最大,随后随着周期的增大而减小。
(4)本文选取横摇角度作为控制条件,基于本文试验结果,考虑一定的安全性,建议275HP拖网渔船在港内锚泊的允许有效波高值取0.7 m,换算成最大波高约为1.0 m。
[1]吴万夫,张荣权.渔业工程技术[M].郑州:河南科学技术出版社,2000.
[2]农业部渔业局编制.2013中国渔业统计年鉴[M].北京:中国农业出版社,2013.
[3]农业部渔业局编制.2014中国渔业统计年鉴[M].北京:中国农业出版社,2014.
[4]栾曙光,王云天,孟宪钦.渔港港内作业水域泊稳条件的研究[J].海洋工程,1999,17(3):69-76.LUAN S G,WANG Y T,MENG X Q.A study of mooring conditions of working area in fishing port[J].The Ocean Engineering,1999,17(3):69-76.
[5]刘传志.大风条件下锚泊船安全评价模型研究[D].大连:大连海事大学,2014.
[6]包文婧.船舶锚系设备智能布局设计研究及软件开发[D].大连:大连理工大学,2013.
[7]Inoue K.An investigation on reducing cable tension caused by swing motion of a ship moored at single anchor in wind-Ⅱ:on reduc⁃ing cable tension by application of bow thruster[C]//日本航海学会论文集.公益社团法人日本航海学会.日本:[S.N.],1982.
[8]Hashimoto S,Yamada T,Yano Y.Experimental study on reducing the swing motion of a ship lying at single anchor in stormy weath⁃er[C]//日本航海学会论文集.公益社团法人日本航海学会.日本:[S.N.],1983.
[9]周崇庆,刘土光,李天匀.风浪中锚泊渔船的锚链系泊张力的分析研究[J].中国水产科学,1999,6(3):78-80. ZHOU C Q,LIU S G,LI T Y.Analysis of chain tension for fishing vessel anchoring in rough water[J].Journal of Fishery Sciences of China,1999,6(3):78-80.
[10]侯建军,东昉,石爱国,等.锚泊状态下锚链作用力的计算方法[J].大连海事大学学报,2005,31(4):10-14. HOU J J,DONG F,SHI A G,et al.Calculation method of chain force on ship at anchor[J].Journal of Dalian Maritime University,2005,31(4):10-14.
[11]Kenji S,Atilla I.Numerical simulation of anchored ship motions due to wave and wind forces for enhanced safety in offshore har⁃bor refuge[J].Ocean Engineering,2012,44:68-78.
[12]孙龙,陈国强,李醒,等.渔港港内锚地泊稳允许波高比较分析[J].水运工程,2011,461(12):54-56. SUN L,CHEN G Q,LI X,et al.Comparative analysis of allowable wave height for steady mooring of the anchorage area in fishing harbors[J].Port&Waterway Engineering,2011,461(12):54-56.
[13]TJT-T 234-2001,波浪模型试验规程[S].
[14]孙一艳.单船港内首尾双锚锚泊泊稳条件试验研究[R].北京:中国水产科学研究院,2015.
[15]俞聿修.随机波浪及其工程应用[M].大连:大连理工大学出版社,2003.
Experimental research on allowable wave height of bow⁃stern anchoring of a single ship in port
SUN Yi⁃yan1,WANG Gang1,CHEN Guo⁃qiang1,LI Jin⁃xuan2,ZHENG Wei2
(1.Fishery Engineering Research Institute of Chinese Academy of Fishery Sciences,Beijing 100125,China;2.State Key Laboratory of Coastal and Offshore Engineering,Dalian University of Technology,Dalian 116024,China)
Currently,the allowable wave height of anchorage in fishing port in our country is empirically deter⁃mined with reference to foreign regulations,which is lack of effective experimental support.In order to verify the ra⁃tionality of current regulations on the allowable wave height of anchorage,physical model experiment on allowable wave height of bow⁃stern anchoring of a single ship was carried out and 275HP trawler was represented as the typi⁃cal ship.Anchoring force and movement of bow⁃stern anchoring system of fishing boat under irregular waves were studied.Impacts of wave incident angle,load conditions of fishing boat,wave height and wave period on anchoring force and movement were analyzed.The experimental results show that anchoring force reaches maximum with 90 degree transverse wave,increases with the increasing of load and wave height,decreases with the increasing of wave period.Similarly the rolling angle reaches maximum with 90 degree transverse wave,decreases with the increasing of load and increases with the increasing of wave height.When wave period gets close to the rolling period of fishing boat,the rolling angle reaches maximum and then decreases with the increasing of wave period.Obtained from the results,0.7 m as allowable wave height is suggested in this experiment.The results provide effective support for the determination of allowable wave height in port and fishing cable design.
allowable wave height;275HP trawler;bow⁃stern anchoring;physical model experiment;anchor⁃ing force;movement
TV 139.2
A
1005-8443(2016)03-0217-07
2015-07-22;
2015-09-17
中央级公益性科研院所基本科研业务费专项资金项目(2014A10XK05)
孙一艳(1981-),女,吉林省人,高级工程师,主要从事渔港相关工程的设计与研究。
Biography:SUN Yi⁃yan(1981-),female,senior engineer.
猜你喜欢
海洋工程(2021年5期)2021-10-27
海洋通报(2021年3期)2021-08-14
中国港湾建设(2021年2期)2021-02-27
智慧少年·故事叮当(2020年9期)2020-10-09
水利技术监督(2019年6期)2020-01-01
汉语世界(The World of Chinese)(2019年2期)2019-04-19
黄河之声(2017年1期)2017-04-27
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05
中国火炬(2014年10期)2014-07-25
船舶力学(2014年5期)2014-01-19