
基于OSGEarth的无人直升机任务规划系统开发
2016-02-23 06:47黄福贵张大高
直升机技术 2016年1期
黄福贵,张 明,张大高
(1.海军驻景德镇地区航空军事代表室,江西 景德镇 333001;2.中国直升机设计研究所,江西 景德镇 333001)
基于OSGEarth的无人直升机任务规划系统开发
黄福贵1,张 明2,张大高2
(1.海军驻景德镇地区航空军事代表室,江西 景德镇 333001;2.中国直升机设计研究所,江西 景德镇 333001)
利用开源程序OSG/OSGEarth来完成无人直升机任务规划系统的开发,主要涉及在线飞行航路的规划与智能判定,实时航迹的显示与航线动态加载等功能。相关项目的试验验证表明,该系统有效地解决了用户对任务规划(航迹有效性判定)的需求,在实时显示无人直升机关键状态的同时,还极大地提高了软件界面的交互性与用户使用体验效果。
航路判定;OSG/OSGEarth;三维可视化;实时航迹显示
0 引言
随着无人直升机广泛应用于边界巡航、森林预警、灾害监控与军事警戒等领域,用户对无人直升机飞行状态的观测要求也越来越高[1]。现阶段用户需求主要体现以下几个方面:
1)针对不同的飞行任务,如何制定适合的在线飞行航路,并判定航路的合理性与安全性,如何对多种可用航路进行筛选。
2)当前航迹显示软件多为二维地图,缺乏对三维高程信息的显示与利用;实时航路与模型缺乏三维立体感的支撑,显示效果很不尽人意。
3)对软件提出更高的交互性要求,要求软件操作更加互动与流畅,符合用户习惯,有更好的用户体验效果。
基于MapX开发的航迹显示与监控软件[2,3]不能满足用户需求,这就给用户在使用无人直升机执行任务时带来诸多不便。为解决以上问题,本文利用OSG/OSGEarth[4,5]开发任务规划系统来满足当前用户的迫切需求。
1 任务规划系统的特点
软件主界面如图1所示。
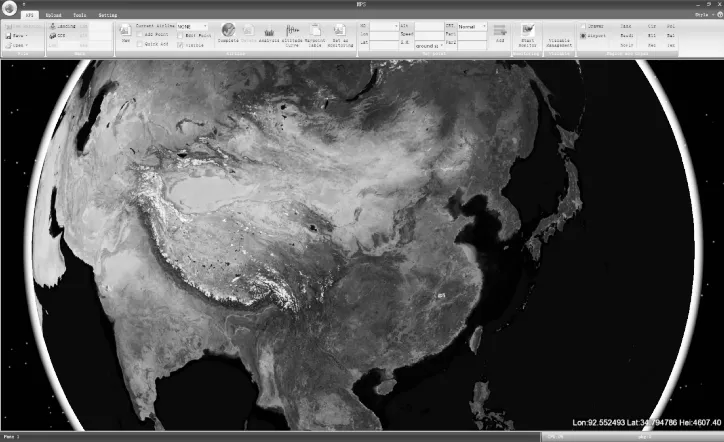
图1 任务规划系统主界面
任务规划系统除具有常规航迹显示地图的基本绘制与实时航迹显示功能外,还增加了航路规划判定和在线航路操作功能;针对软件显示界面的优化:利用OSG/OSGEarth技术加载三维模型,丰富地图显示元素,增强软件交互性能,提升用户体验效果。
这些都将为用户的使用提供极大的便利,特别是为无人直升机执行任务提供有效的航迹控制方案与实时航迹切换的策略。
任务规划系统针对用户需求开发的功能如下:
1) 针对具体飞行任务与态势信息,开展在线航路的规划与智能判定,制定适合当前任务需求的可用航路,针对不同可用航路设计筛选机制,筛选最适合用户需求的飞行航路,保障无人直升机安全高效地完成飞行任务。
2) 利用OSG/OSGEarth程序加载附带高程数据的地图与三维模型来增加软件对地形高程数据的利用;同时利用OSG/OSGEarth来绘制立体图形与带飞行高度的实时航迹,增强软件的三维可视化效果。
3) 利用OSGEarth将地图操作集成于鼠标与快捷菜单的操作中,提示信息集成到地图显示区域,提高用户操作效率与流畅度,增强用户体验效果。
2 功能开发的方案
2.1 航路规划与智能判定
在充分利用地形三维高程数据与直升机性能参数的情况下,结合实际飞行经验与控制策略,无人直升机航路的规划与判定通过对输入航迹不断的智能判定与参数修正,得到安全有效的飞行航路。
航路规划与判定流程图如图2所示。

图2 航路规划与智能判定流程图
在地图上绘制航迹时依据飞行速度与航点特征字的不同,采用不同的绘制方式,飞行速度用于计算航点转弯半径,转弯半径则影响无人直升机的控制(转弯)策略。转弯半径的计算公式如下:

其中,R为转弯半径,V为地速,w为转弯的偏航加速率,w的值与前飞速度有关。航点转弯仿真效果如图3所示。

图3 航点转弯仿真示意图
依据航点飞行速度与特征字插值生成无人直升机理论航路后,软件将对理论航路再次执行航迹判定,以确保理论航迹(带航点转弯控制策略的航路)依然满足实时飞行时对于飞行速度、飞行高度、飞行航段、链路视通与油耗的要求。智能判定采取遍历理论航路的方式,在飞行速度与高度安全的情况下,着重考虑航路飞行时链路是否通畅与油量是否充足,并将判定信息输出。航路判定示意图如图4所示。

图4 航路规划与智能判定示意图
规划航路经过智能判定之后,绘制在地图中,满足理论设计的同时又可能不符合实际需要,需操作人员依照飞行经验,对规划航路进行筛选:符合实际需求的,保存于规划航路文件;不符合的,更改航路位置或飞行参数,继续规划与验证。下图5(a)为可用的有效规划航路,图5(b)为不符合实际需求的航路。

图5 有效航路与无效航路的筛选
2.2 航路择优筛选准则的设计
针对同一个飞行任务,可以得到多条可用航路,如何筛选出最符合用户需求的航路,是我们需要进行深入思考的问题。依据无人直升机飞行经验,航路的选择注重飞行安全度、飞行时间、飞行距离、飞行油耗与任务区域飞行时间的指标度量,这些指标可以通过表2内容采取权重值叠加方式获取。
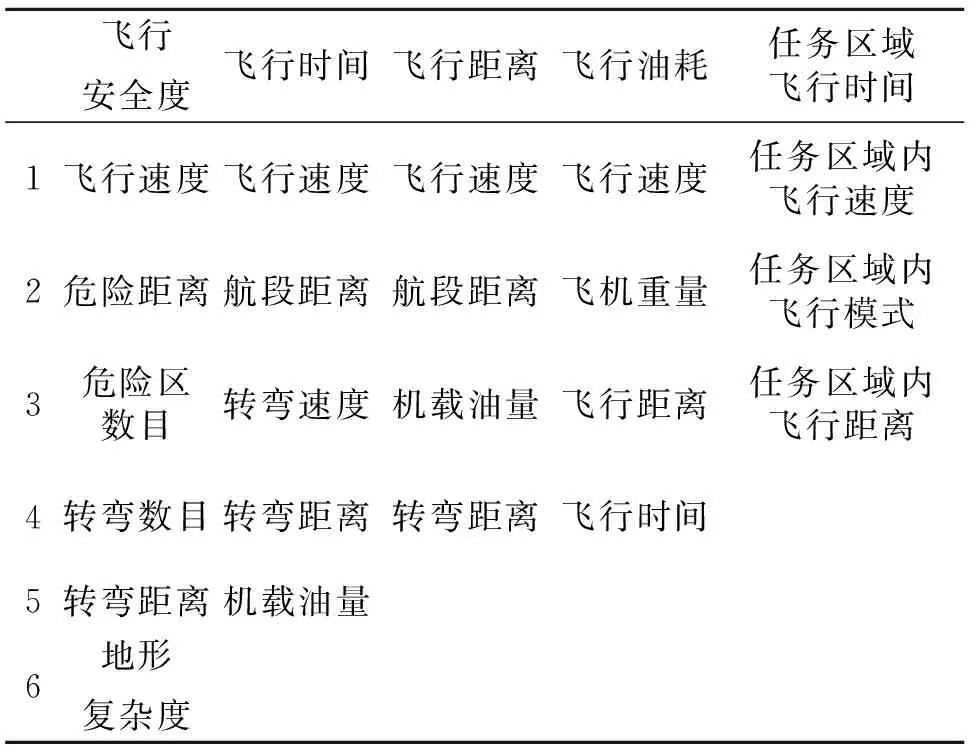
表2 航路度量标准的影响因素
每个航路度量指标由各自影响因素的数值与权值比重通过加权算法叠加获取。这里以飞行安全度为例说明此计算方法:

度量指标的结果取决于影响因素数值的计算与权重比的设定,受计算方法与权重分配影响较大,各个因素的权值比重可根据飞行经验进行调整。通过上述方法计算得到不同航路的度量标准之后,软件可按照用户需求根据度量标准对多条航路进行排序显示,为用户选择航路提供有效的帮助信息。如图6所示,两条可选航路用于无人直升机执行飞行任务:在航路最短条件下,可选择航路2;在安全性条件下,可选择航路2;在任务区域飞行时间条件下,可选择航路1。
2.3 实时航路控制
实时航路的操作包括回收点注入,在线航路的
注入、查询、删除与航线/航点切换功能,用于无人直升机在飞行过程中的航路控制。在线航路操作功能需要软件通过数据链路与无人直升机进行指令交互确认完成操作指令与数据的上传。

图6 可用航路的筛选示意图
通过在线航路相关功能的协作配合,用户可以实时更改或控制无人直升机飞行航路,在线航路的注入与删除逻辑较为复杂,功能实现流程图如图7所示。

图7 在线航路注入/删除功能流程图
2.4 三维立体化显示
OSG/OSGEarth程序可以加载多种格式的含高程数据的地图文件,加载不同类型三维立体模型,可绘制立体图形与含高度的实时航迹。这些都为任务规划软件实现三维显示提供了便利。而地图中包含的高程数据可以用于航路智能判定中链路视通的判定中,也为地图中绘制区域、标识、形状与文本提供参考信息。
本软件进行三维航迹的显示效果如图8所示。

图8 无人直升机关键状态显示与监控
2.5 人机交互性
人机交互能力通过软件辅助功能的开发设计来完成。软件辅助功能主要包括两点测距,注释添加,为用户提供地图参数接口,可根据需要更改地图数据源与地图中绘制元素(航线/航点,图形、区域与文本)的颜色;提供多种内部数据的显示、修改与保存功能,方便用户实时查看与修改,提高用户体验度。
3 关键技术
任务规划软件着重解决用户的迫切需求,依托OSG/OSGEarth解决三维地图加载与三维可视化问题,系统开发使用的关键技术如下:
1) 针对飞行任务特点,设定合理的智能判定方法用于飞行航路的在线规划;设定适合的航路筛选准则;通过在线航路操作的协调配合,完成无人直升机航路的在线变更与控制。
2) 采用OSG/OSGEarth开源程序进行软件开发,实现三维模型与地图文件的加载与显示功能,丰富地图显示元素,提升实时航迹的三维视觉效果;
3) 利用OSG/OSGEarth将地图操作集中于鼠
标与快捷菜单中,提供多种数据显示界面与更改接口,方便用户使用,增强人机交互性与用户体验。
软件的功能实现如图9所示。

图9 任务规划系统功能图
4 结束语
目前本系统已应用于某型号无人直升机的试验试飞任务中,相关功能展现出很好的使用效果,有效地完成了某型号试验试飞任务,获得了试飞技术人员良好的评价与认可。在以后的工作中还得结合用户需求,进一步完善现有功能,开发新的功能,使得任务规划系统满足无人直升机飞行任务的发展需求。
[1] Wang R, Qian X L. OpenSceneGraph 3.0 Beginner’s Guide [M]. Birmingham: Packet Publishing, 2010.
[2] 常 茹,童 芳,李 心.基于MapX的航迹显示及告警系统的开发[J].遥测遥控,2013,14(1):53-56.
[3] 宋雪源,李建文,马国元.基于MapX的GPS位置信息实时标注系统[J].海洋测绘,2011,31(1):58-60.
[4] 肖 鹏,刘更代,徐明亮. OpenSceneGraph三维渲染引擎编程指南[M].北京:清华大学出版社,2010.
[5] 吴 琼,孙韶杰.基于OSG的战场态势仿真统的设计与实现[J].指挥控制与仿真,2014,36(2):78-84.
Missions Plan System Development of Unmanned Helicopter Based on OSGEarth
HUANG Fugui1, ZHANG Ming2, ZHANG Dagao2
(1.Navy Aviation Military Delegate Department in Jingdezhen, Jingdezhen 333001,China; 2.China Helicopter Research and Development Institute, Jingdezhen 333001, China)
Used the open source OSG/OSGEarth to complete the task planning system development of UAV, including airline plan and judgment, real time airline displaying and airline dynamic loading functions. Through the relative project test and confirmation, it was shown that this software system could efficiently resolve task planning requirements about airline feasibility and safety judgments, display real-time circuital information of UAV and greatly improve the software interface interactive and user experience.
airline judgment; OSG/OSGEarth; 3-D; real time airline displaying
2015-12-22 作者简介: 黄福贵(1979-),男(汉族),江西临川人,博士,工程师,主要研究方向为航空装备质量监督与无人直升机技术。
1673-1220(2016)01-045-05
V249.122+.3;V279
A
猜你喜欢
环球时报(2022-09-15)2022-09-15
军事文摘(2022年15期)2022-08-17
舰船科学技术(2022年11期)2022-07-15
火力与指挥控制(2020年2期)2020-04-02
弹道学报(2019年4期)2020-01-10
弹道学报(2018年4期)2019-01-05
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年6期)2016-11-16
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
