
无人直升机悬停/低速段对象特性分析与控制策略研究
2016-02-23 06:49袁涛
直升机技术 2016年1期
袁 涛
(海装驻武汉地区军事代表局,湖北 武汉 430060)
无人直升机悬停/低速段对象特性分析与控制策略研究
袁 涛
(海装驻武汉地区军事代表局,湖北 武汉 430060)
详细分析了无人直升机悬停/低速段的对象特性,从直升机的运动机理入手定性地分析了无人直升机飞行过程的时域特性,采用典型直升机数学模型定量地分析了悬停/低速段的稳定性和操纵性。在分析对象特性的基础上,提出了无人直升机四个通道的控制律策略,并通过仿真分析,对比了加入控制律前后的无人直升机的稳定性和操纵性,验证了所提出的控制策略,能较好地解决无人直升机在悬停/低速段稳定性差、操纵困难等问题。
无人直升机;悬停/低速飞行;对象特性;飞行控制
0 引言
悬停和低速飞行是直升机特有的飞行模态,也是无人直升机最常用的飞行状态。直升机悬停/低速段的对象特性跟前飞时的特性有着很大的差异性,因此悬停/低速段的控制律设计也有别于其他飞行状态。
本文分别从定性和定量两方面分析了无人直升机在悬停/低速段的对象特性,细致地分析了悬停/低速段的运动机理,结合悬停/低速段的飞行特点,总结出运动特点,在单通道控制律设计的基础上给出了无人直升机四个通道的控制律设计方案,可以为无人直升机悬停/低速段飞行性能的提升提供一定的理论参考。
1 悬停/低速段的控制难点
处于悬停/低速飞行的直升机,其机身前行的气动效应可以忽略,但是由于旋翼处于高速旋转状态,旋翼的高速下洗涡流使得机身受到向下的阻力、侧向力和偏航力矩,水平安定面也受到向下的阻力,此阻力产生的力矩对机身的纵向力矩作用较大,而水平安定面对直升机纵向的静稳定性影响很大,这一系列的影响使得直升机在悬停/低速段的对象特性更复杂[1]。此外,由于旋翼和机身是柔性连接的,直升机类似旋转的圆盘下面挂着一个重物,极易出现钟摆效应。旋翼产生的合力臂较小,对机身姿态的操纵较为困难,跷跷板结构的旋翼没有桨毂力矩,俯仰和滚转的力矩都靠旋翼的拉力来完成,进一步增加了操纵的困难。而直升机在悬停/低速段自身的稳定性差、振动严重、速度测不准等因素也都给悬停/低速段的控制增加了难度。
2 悬停/低速段的稳定性
2.1 悬停/低速段的时域特性
典型直升机的数学模型是全包线非线性动力学模型,可以通过配平线性化、降阶处理,得到一个八阶的线性方程。为了便于分析直升机的物理模型,我们忽略了纵、侧向的气动耦合,得到六自由度的线性小扰动方程。
纵向运动方程:
(2-1)
(2-2)
(3-3)
侧向运动方程:
(2-4)
(2-5)
(2-6)
无人直升机在做悬停/低速飞行时,纵向突然受到干扰后,会产生一个俯仰运动,旋翼的阻尼使得俯仰运动迅速衰减,俯仰阻尼模态是一个短周期模态,特征根上反映为一个较大的负实根。在短周期之后,俯仰运动必然带来纵向速度的变化,由于直升机旋翼迎角的静不稳定,但速度又是静稳定的,纵向的速度往往是震荡发散的,旋翼迎角的改变带动机身姿态角的改变,悬停受扰后,纵向表现为类似悬点在三倍旋翼半径点的单摆摆动[2]。低速飞行受扰等于悬停受扰后叠加一个纵向的速度,震荡模态演变成沉浮运动模态,这种扰动引起的运动是长周期模态,特征根上反映为一对正实部较小的共轭复根。
横向受到扰动后,旋翼的气动阻尼使得滚转运动立刻衰减,由于滚转转动惯量小于俯仰转动惯量,滚转阻尼模态比俯仰阻尼模态衰减快,特征根上反映为最大的负实根。侧向力引起的线速度与纵向不同,由于垂尾和尾桨的阻尼作用,横侧向的震荡模态是收敛的。当直升机有前飞速度时,横侧向的悬停震荡就演变成荷兰滚模态。直升机的滚转会带来航向的变化,当旋翼的上反效应不足时,荷兰滚模态便演变成了螺旋模态,直升机右倾后,旋翼拉力和重力的合力使得直升机右侧滑,尾桨的拉力发生变化,使得直升机向右偏转,表现出方向的稳定性,旋翼的上反效应不能使右滚转停止,航向也就跟着旋转,形成螺旋下降。震荡频率受直升机的质量影响,横侧向的震荡频率跟纵向的震荡频率比较接近,特征根上反映为频率与纵向震荡频率接近的负的共轭复根[3]。
无人直升机垂向受到干扰后,旋翼桨叶产生的升力发生变化,也就是旋翼的拉力发生变化,拉力的变化必然带来反扭矩的变化。偏航运动发生后,垂尾和尾桨会产生阻尼消除侧滑,垂尾和尾桨的气动力高于直升机的重心,使得直升机侧倒。直升机的升力发生变化,又引起垂直方向的运动,形成震荡模态。垂直通道和航向通道自身的阻尼比较大,有时表现为两个衰减运动模态,即垂直运动模态和航向运动模态,特征根上反映为一对阻尼比较大的共轭复根,或为两个负实根(见表1、表2)。
综上所述,无人直升机的滚转和俯仰衰减模态比较好,但纵向是不稳定的,需要增稳,横侧向的震荡模态虽是稳定的,但是阻尼偏小,也需增加阻尼。也就是前飞时荷兰滚阻尼偏小,需增加荷兰滚阻尼,垂直运动和航向运动都比较缓慢,需加快两者的衰减时间。
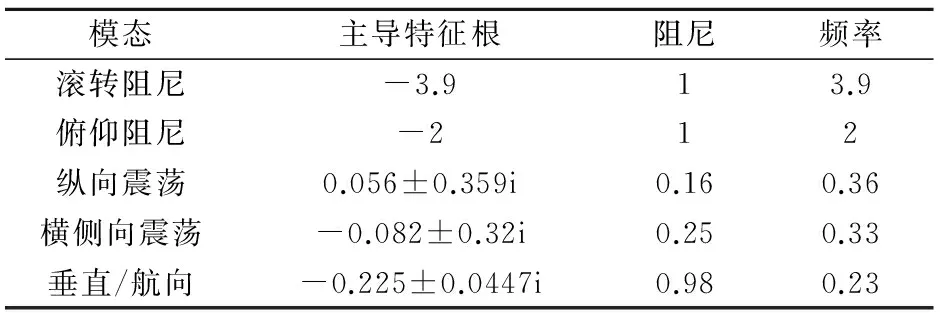
表1 悬停状态模态特性

表2 前飞10m/s模态特性
2.2 悬停/低速段的频域特性
我们用频域分析法对直升机四个通道的性能进行了初步分析。从无人直升机的频域特性可以看出其稳态误差、抗干扰能力和动态响应状态,为控制律设计提供了输入。
图1为前飞10m/s时俯仰角速率(q)、垂向速度(w)、滚转角速率(p)和偏航角速率(r)的开环频域特性曲线。俯仰通道和滚转通道的低频段幅值较小,难以跟踪输入,也就是操纵具有较大的稳态误差,所以在控制律设计中姿态是不能精确控制的。四个通道中高频段的bode图曲线变化趋势都比较好,四个通道都具有一定的抗干扰能力。可见,无人直升机的控制难点在于纵向和横向通道。

图1 前飞10m/s开环频域特性曲线
3 悬停/低速段的操纵性
直升机靠操纵旋翼来完成各项飞行任务。前面我们分析了处于稳定状态的直升机在受到扰动时的基本运动模态,而直升机的操纵相当于受到一个比较恒定的扰动,操纵后模态还是上面分析的几种模态。直升机的操纵主要有旋翼的总距、纵向、横向操纵和尾桨操纵,研究这些操纵响应就是研究直升机在这些操纵后的运动。
垂直运动与其他运动的耦合较小,分离出来后垂直速度对总距的传递函数是一个一阶惯性环节。从图2中看出,悬停时的时间常数为3.12s,稳态值为4m/s,前飞时时间常数为1.86s,稳态值为2.31m/s,直升机的升降能力都还不错,时间常数有点大,若要获得更好的机动性,则需减小操纵的时间常数。
纵向周期变距的操纵响应表现为直升机俯仰姿态的变化。从图1中看出姿态角的稳态误差很大,抗高频干扰能力好。图3为纵向操纵的脉冲响应,qpk=0.125°/s,Δθpk=0.1°,qpk/Δθpk=1.25,直升机的快捷性很好。
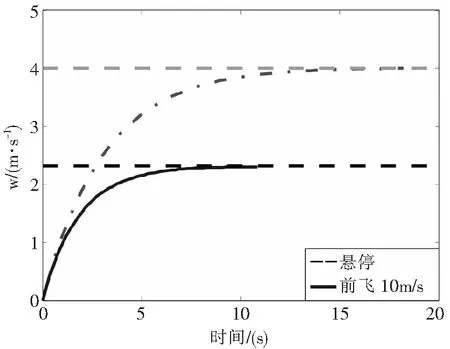
图2 垂直和前飞10m/s垂直上升速度阶跃响应

图3 纵向操纵脉冲响应
直升机横向周期变距的操纵响应表现为直升机滚转姿态的变化,从图1可知,滚转角的稳态误差比俯仰角小,但同样存在操纵困难的问题。图4为横向操纵的脉冲响应,ppk=0.37°/s,Δφpk=0.08°,ppk/Δφpk=4.62,直升机横向周期变距的快捷性较好。
尾桨操纵响应表现为偏航角速率的变化,从图1看出直升机偏航角速率在低频段能够精确跟踪,具有一定的抗干扰能力。图5为偏航操纵的脉冲响应,rpk=0.09°/s,Δψpk=0.73°,rpk/Δψpk=0.123,直升机航向快捷性不好,需提高响应的快捷性。
通过分析无人直升机悬停/低速段时的操纵响应,可以看出典型无人直升机的操纵性并不是很好,垂向通道需要减小时间常数以取得更好的机动性,纵向和横向通道比较类似,都需要提高带宽来增强跟踪能力,尾桨通道则需要提高操纵响应的快捷性。

图4 横向操纵脉冲响应

图5 航向操纵脉冲响应
4 悬停/低速段的控制策略
采用传统的单通道设计方法,将无人直升机分为纵向通道、横侧向通道、高度通道和航向通道。四个通道单独设计控制律,都采用经典的内外回路控制结构。纵向通道和横侧向通道内回路为姿态回路,外回路为速度和位置回路。高度通道的内回路为升降加速度回路,外回路为升降速度和高度回路。偏航通道的内回路为偏航角速率回路,外回路为航向角回路。
4.1 纵向变距通道的控制方案
内回路利用反馈俯仰角速率弥补直升机自然阻尼的不足,再加上用姿态角反馈作增稳,增加外回路的阻尼。内回路的控制律结构形式为:
(4-1)
控制律由前馈配平变距、角速率阻尼回路、姿态角增稳回路组成。角速率增加了短周期运动的阻尼。直升机的姿态角在悬停和低速时是控不住的,最终都将衰减为零。我们利用姿态的稳定性,用姿态角反馈作增稳,将姿态保持在零姿态角状态,而不需要跟踪配平状态。
悬停/低速段的速度受风的影响很大,而速度模态是长周期模态,反应时间比较长,由于加速度的变化先于速度,我们引入加速度反馈回路以增强抗风能力,控制律的结构形式为:
(4-2)
(4-3)
悬停时直升机的位置保持不变状态,低速飞行时直升机的位置处于跟踪状态,只需要在悬停的状态下将位置的命令输入给定为速度的积分,位置回路便实现跟踪的功能,控制律结构形式为:
(4-4)
(4-5)
我们采用并级连接将内外回路连接起来,外回路位置偏差或者速度偏差直接转换成纵向变距,而不是转化成姿态角指令,避开了姿态抖动和操纵困难的问题[4]。外回路设计是控制核心,我们采用速度与位置耦合的控制方法,通过ucmd,xcmd组合来实现速度和位置控制。悬停时,ucmd=0,xcmd=0,直升机的位置回路工作在位置保持模式;当小速度飞行时,ucmd=ug,xcmd=∫ucmddt,直升机的位置回路工作在位置跟踪模态。无人直升机可以根据给定的速度指令和位置指令完成悬停/低速段的飞行任务。
4.2 横向变距通道的控制方案
横向变距通道的控制律设计类似于纵向变距通道,内回路采取滚转角速率反馈增加阻尼,滚转角反馈回路增稳,外回路为侧向速度和侧向位置控制。横侧向位置控制律结构形式:
(4-6)
(4-7)
4.3 尾桨通道的控制方案
尾桨通道控制主要是要实现航向的稳定与控制,并消除侧滑。尾桨通道的内回路采用偏航角速率反馈控制,以增加偏航阻尼。内回路控制律结构形式为:
(4-8)
外回路是偏航角控制,悬停/低速时,垂尾的气动效应很弱,航向通道主要工作在航向保持和控制状态,外回路的控制律结构形式为:
(4-9)
4.4 总距通道控制方案
总距通道主要要实现高度的稳定和控制功能。从前面的分析可知,高度通道需要增加阻尼,加快垂直速度的响应。我们对高度通道的内回路采用升降加速度的控制律,并增加了升降速度回路的阻尼,外回路则采用升降速度和高度控制。内回路控制律结构为:
(4-10)
因升降速度难以精确测得,我们用高度的导数代替。升降速度回路控制律结构为:
(4-11)
高度跟纵横向位置的控制方法类似,都是在速度的基础上采用比例控制, 控制律结构为:
(4-12)
5 仿真验证
为了验证控制策略的效果,我们在MATLAB中建立八阶线性模型,选取悬停状态进行仿真,从稳定性和操纵性两方面验证了控制策略的可行性。
图6为无人直升机在加入控制律后,各模态的时域响应图,从图中可以看出,采用本文提出的控制律方案后的无人直升机各个模态都是稳定的,受扰后恢复较快。

图6 加入控制律前后的模态响应对比
在无人直升机的稳定性方面,可以看出本文提出的控制策略较好地解决了无人直升机在悬停/低速段稳定性差的问题,取得了满意的阻尼特性。
在无人直升机的操纵性方面,垂向通道的时间常数为3.2s,悬停时垂向的机动性没有多大的变化,但没有了稳态误差,能精确跟踪垂向的速度。纵向通道的控制问题主要是操纵稳态误差大。本文提出的纵向通道的控制律方案,将姿态角稳定在零左右,所以在操纵的稳态误差上并没有太大的改变。
图7为加入控制律前后的操纵响应图。从图7(d)可以得出俯仰通道中,rpk=0.63°/s,Δψpk=0.1°,rpk/Δψpk=6.3,尾桨通道在加入控制律后操纵响应更为快捷。
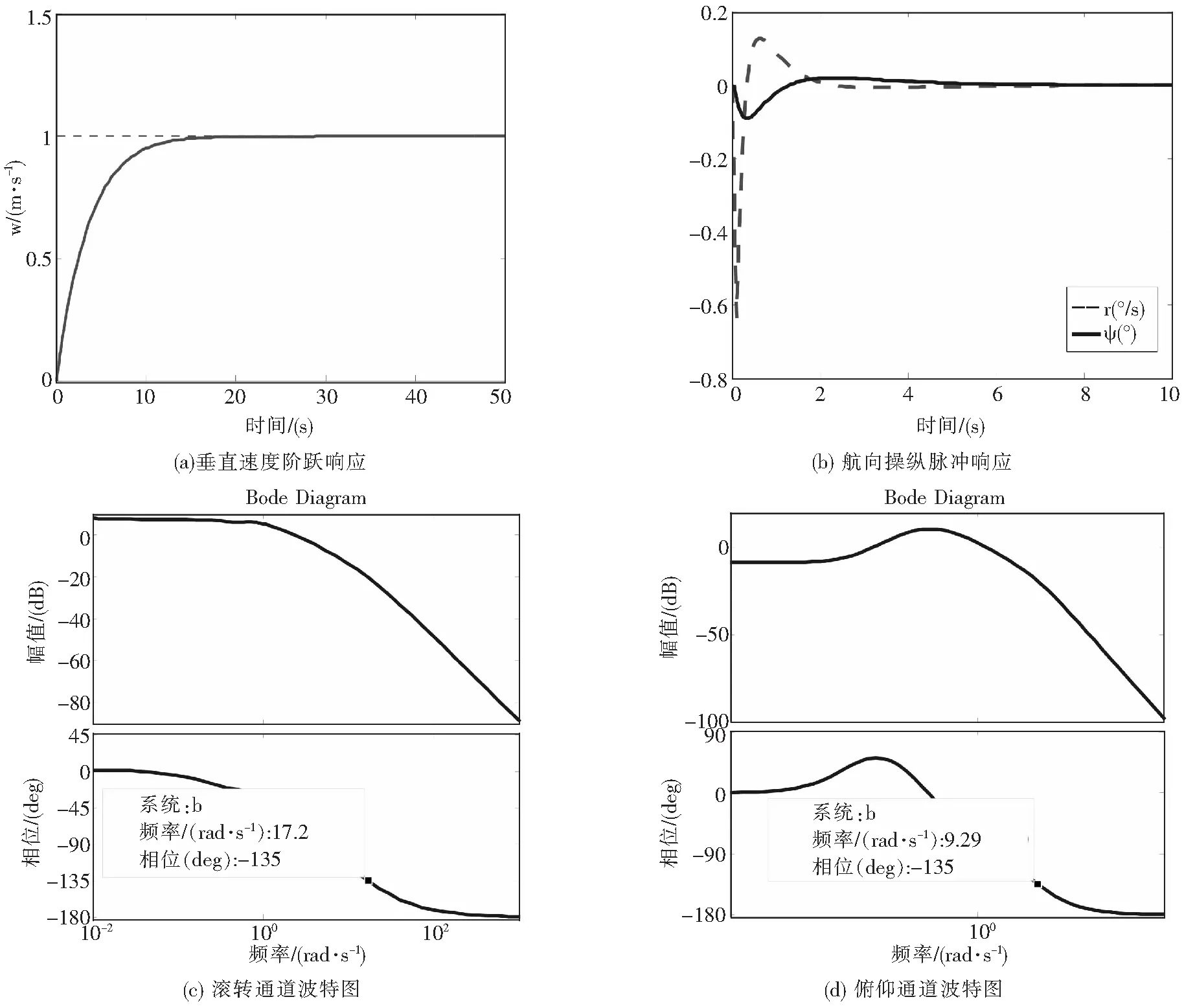
图7 加入控制律前后的操纵响应
[1] 高 正,陈仁良.直升机飞行动力学[M].北京:科学出版社,2003.
[2] 杨一栋. 直升机飞行控制[M]. 北京: 国防工业出版社, 2007:64-65.
[3] 黄一敏.直升机飞行控制技术研究[D].南京:南京航空航天大学博士学位论文,1999.
[4] 黄 海.无人直升机悬停/小速度段的飞行控制律设计技术研究[D].南京:南京航空航天大学.
The Plant Characteristics Analysis and Control Strategies Design of Hover and Low-Speed Flight for Unmanned Helicopter
YUAN Tao
(Wuhan Military Representative Bureau of Navy Equipment Department, Wuhan 430064, China)
This paper detailed analyzed the plant characteristics of hover and low-speed flight for unmanned helicopter, Firstly, analyzed the flight in time domain from the physical mechanism of movement qualitatively. Secondly, analyzed the stability and the controllabitity from the mathematical model of unmanned helicopter quantitatively. Thirdly, presented the control strategies for the four channels with the analysis of the plant characteristics. Lastly, compared the plant with the controlled plant on the stability and the controllabitity. From the simulation, we could reach a conclusion that, the strategies presented in this paper could solve the shortage of the stability and the controllabitity of unmanned helicopter.
unmanned helicopter; hover and low-speed; plant characteristics; flight control
2015-11-04 作者简介:袁 涛(1972-),男,湖北武汉人,硕士,高工,主要研究方向:直升机研制质量监督。
1673-1220(2016)01-018-06
V249.1;V279
A
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
航空学报(2022年2期)2022-03-29
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年9期)2021-11-02
南京航空航天大学学报(2021年2期)2021-05-06
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
直升机技术(2018年3期)2018-10-09
北京航空航天大学学报(2016年8期)2016-11-16
汽车文摘(2015年11期)2015-12-02
