
带式夹送淡水鱼剖鱼机的研制
2016-02-18 07:06黄鹏飞谭鹤群张春吉
食品与机械 2016年12期
黄鹏飞 谭鹤群 张春吉 万 鹏 聂 杰
(华中农业大学工学院,湖北 武汉 430070)
带式夹送淡水鱼剖鱼机的研制
黄鹏飞 谭鹤群 张春吉 万 鹏 聂 杰
(华中农业大学工学院,湖北 武汉 430070)
依据鲢鱼的结构特征和对产品品质的要求,研制了一款带式夹送淡水鱼剖鱼机,并以鲢鱼为试验对象进行了剖鱼试验。该剖鱼机由机架、夹送系统、剖切系统组成。夹送系统皮带间距、皮带转速、剖切系统刀盘高度等关键部件工艺参数均可调节,配套功率共为3.7 kW,其中剖切系统电机1.5 kW,夹送系统电机2.2 kW。以(1.50±0.25) kg鲢鱼为剖切对象所进行的试验结果表明:皮带间距对进料、剖切、出料均有显著影响,皮带间距40 mm时,可以实现100%顺利进料、平稳剖切和顺利出料;刀盘高度则对剖切质量影响显著,从鱼头到鱼尾完整剖开鱼体要求刀盘高度不高于190 mm,完整保留鱼鳔要求刀盘高度不低于210 mm,不破坏鱼胆要求刀盘高度不低于180 mm。皮带间距取40 mm,刀盘高度取180~190 mm时,剖鱼机运行稳定且剖切效果最优,处理速度可达1 200 尾/h。
淡水鱼;剖切;剖鱼机;带式夹送
淡水鱼是中国主要的鱼类食材,产量占水产品总产量的50%以上,加工比例仅占20%[1],且大多为冷冻保鲜等低附加值加工而高附加值加工是淡水鱼产业的发展方向[2]。
日本及欧美在水产品加工领域方面已经形成了适合本国或本地区特点的水产加工机械设备[3],如日本东洋水产机械株式会社生产的TOYO-167NM小型鱼类处理机、德国BADDER公司生产的鱼片加工机组、瑞典Vmp公司生产的鲑鱼处理设备[4]。但其大多针对海水鱼类,对淡水鱼的适应性较差[5]。中国相关研究机构及高校近年对水产品加工展开了积极研究,如胡小亮等[6]对竹夹鱼去脏用剖切刀具的优化,陈庆余等[7]对典型海产小杂鱼去脏进行了研究。剖切效果良好,但主要针对小型海产鱼,对大宗淡水鱼的适用性较差。彭三河等[8]针对淡水鱼等设计了一种链式剖鱼机,可实现剖腹去脏的功能,但无法完成背部剖切,且采用鱼盒夹持,对不同鱼种及不同规格适用性较差。本课题组于2006年开始研制的链式剖鱼机[9],已制作出第二代剖鱼机样机并申请专利一项[10],样机已投入到生产实践中,效果良好[11],但因针对不同鱼种需定制并更换夹具故而影响生产效率。现针对大宗淡水鱼加工剖切工序设计了一种带式夹送淡水鱼剖切装置,以提高对不同鱼种不同规格的适用性,实现连续加工的目的,并针对常见规格白鲢与对该装置的夹送机构及剖切机构进行了试验,以确定该装置最优工艺参数。
1 带式夹送淡水鱼剖切机的设计方案
1.1 设计要求
本装置针对常见淡水鱼如1.25~2.25 kg鲢鱼、0.35~0.75 kg鳊鱼、1.7~2.3 kg草鱼、1.2~1.8 kg鲤鱼进行加工,在夹送过程中,针对不同鱼种体型规格差异大,夹持输送机构需要具有适应性,并需要有足够大的夹持压力保证鱼体稳定输送,剖切工序需要将鱼背完全剖开,以便后续风干食品的调味及干燥。剖切时要避开鱼胆,避免鱼胆破裂影响鱼肉风味。依据以上要求剖鱼机需要夹持机构适应性强、稳定牢靠,刀具剖切力足够剖开鱼背[12]。另外,剖鱼机还需要满足结构简单体积小巧、操作安全、环保节能等要求。
1.2 剖鱼机总体结构设计
带式夹送剖鱼机主要由机架、夹持输送机构、剖切机构组成。其结构示意图见图1。

1. 机架 2. 夹送皮带 3. 刀盘 4. 刀盘轴 5. V带轮 6. 电机皮带 7. 张紧轮 8. 剖切系统电机 9. 夹送系统电机 10. T6换向减速器 11. 同步带轮 12. 同步带 13. 托鱼槽 14. 从动辊 15. 主动辊
图1 带式夹送剖鱼机结构示意图
Figure 1 Sketch of the belt-camp fish slitter
机架总体由支撑不同零部件的结构所组成,夹送系统由类弹簧柱塞阵列、夹板、辊轮、夹送皮带、动力部件等主要部分组成,夹送皮带2由主动辊15以及从动辊14驱动,通过导向轮保证流畅运转。夹板支撑类弹簧柱塞阵列,通过弹簧柱塞阵列对夹送带的张紧力达到夹紧鱼的效果。
剖鱼机剖切系统主要由剖切刀盘3、刀盘轴4、刀盘轴支架、电机8以及传动部件组成。刀盘安装在刀盘轴上,刀盘轴通过带座轴承安装在刀架支板上。电机通过带传动带动刀盘轴旋转以达到剖切效果。刀盘轴支架安装在机架的刀架上,可在刀架上沿竖直方向滑动,以调节刀盘的剖切深度。夹送系统传动装置包括电动机、联轴器、减速器锥齿轮组、辊和同步带轮组,传动比为1∶5。剖切系统传动装置由电动机、皮带轮和V带,传动比为1∶1。
1.3 剖鱼机加工流程和工作原理
1.3.1 加工流程
装置启动→人工进料→夹持输送机构输送鱼体→剖切机构剖开鱼背→出料
1.3.2 工作原理 工作时,人工将鱼按头朝前背朝上的方式送入夹持皮带,鱼体在弹簧柱塞压力下,被皮带夹送至高速旋转的剖切刀盘下方并被继续向前夹送至剖开背部。被剖开的鱼体被皮带继续夹送至出料口。出料口设计为斜面,鱼体借助自身重力滑出完成整个剖鱼过程。剖鱼机剖切过程示意图见图2。

1. 鱼体 2. 皮带 3. 刀盘轴 4. 类弹簧柱塞阵列 5. 主动辊 6. 导向轮 7. 刀盘 8. 从动辊
2 剖鱼机主要工作部件的结构设计
2.1 夹板的设计
根据鱼的尺寸范围、弹簧柱塞及导向轮的安装、夹板间距及夹角的可调节等要求,设计如图3夹板,单侧弹簧柱塞数量为42个。

1. 夹板1 2. 夹板2 3. 夹板3 4. 夹板4 5. 夹板支轴 6. 支撑螺栓
图3 夹板结构图
Figure 3 Structure diagram of splint
依照夹板设计要求,夹板的间距、张角要可以调节。夹板1和夹板2的底座部分为轴对称关系,利用底座上的孔和圆弧槽可以在机架上进行调节,使夹板能同步调节间距和张角。
2.2 弹簧柱塞的结构设计
类弹簧柱塞结构主要原理是使柱塞结构在弹簧载荷的作用下仅沿着轴向一个自由度的方向滑动。万向滚珠1通过端盖内的定位螺母3的预紧力定位于尼龙端盖2上,预紧力的拉伸作用同时可以拉紧万向滚珠的螺纹段,使滚珠流畅滚动。尼龙柱5和尼龙端盖2、限位螺母6通过螺纹连接。夹板位于弹簧4和限位螺母6中间段,尼龙柱穿于夹板孔中。其结构见图4。
2.3 皮带的选型
因鱼身表面有黏液,不利于夹持牢固。因此剖鱼机夹送系统皮带选用表面粗糙,与鱼体表面摩擦较大的PVC防滑草坪纹爬坡带,其结构见图5。
2.4 夹送系统传动方式的设计
夹送系统整体传动方案为:电机经过减速器的锥齿轮组,再通过联轴器与辊连接,主动辊经过夹送皮带将动力传给从动辊。而主动辊则通过同步带轮组将动力传递给另一条夹送皮带,完成电机带动两条夹送皮带等速反向转动。同步带轮组传动示意图见图6。

1. 万向滚珠 2. 尼龙端盖 3. 定位螺母 4. 弹簧 5. 尼龙柱 6. 限位螺母
Figure 4 Structure diagram ofthe fish clamping structure similar to spring-loaded plunger

图5 草坪纹PVC输送带

1. 张紧同步带轮 2. 辅助同步带轮轮 3、4. 主传动同步带轮
3 主要设计参数确定
3.1 皮带的速度设计
剖鱼完整工作行程为鱼头进夹送皮带间隙到鱼尾离开夹送皮带间隙。其值取夹送系统导向轮中心距与鱼身长平均值之和,剖鱼机夹送系统导向轮中心距为850 mm,鱼身长平均值取400 mm,理论剖鱼单位时间取3 s。夹送皮带的运行速度按式(1)计算:
(1)
式中:
v——夹送皮带的运行速度,mm/s;
Lb——剖鱼机夹送系统导向轮中心距,mm;
L0——鱼体总长,mm;
t——理论剖鱼单位时间,s。
经过计算v=416.7 mm/s。
3.2 弹簧参数选择
弹簧指数C取值范围为4~16,为保证弹簧在夹持鱼体的过程中弹簧灵活形变,C值可在范围内适当取大。依据弹簧柱塞的设计尺寸,取弹簧外径Ds=26 mm,线径d=2.2 mm。则C=(Ds-d)÷d=10.82,曲度系数K=1.11。由此确定弹簧柱塞结构中弹簧的设计技术要求为旋向:右旋;外径:Ds=26 mm;线径:d=2.2 mm;有效圈数:n1=7;总圈数:n=9;弹簧节距:p=5.27 mm;弹簧自由高度:H0=40 mm。
3.3 剖切刀具选择
依据白鲢的鱼体结构研究,将鱼背完全剖开所需的剖切深度Ld至少为50 mm,如图7所示,考虑安装和强度的因素,刀盘轴直径M设计为30 mm,为了不使鱼体与刀盘轴发生干涉,刀盘直径应不小于D=2×Ld+M=130 mm。针对不同鱼种不同规格可依据体型进行更换。

图7 刀盘结构尺寸示意图
4 剖鱼机试验
4.1 试验材料与仪器
鲜活白鲢鱼:(1.50±0.25) kg,采购于华中农业大学生鲜超市;
电子秤:kf-00051型,浙江凯丰集团有限公司;
卷尺:GW-366-5型,宁波长城精工有限公司;
变频器:G5M-5.5T4-1A型,杭州安川电气有限公司;
带式夹送剖鱼机:自制。
4.2 夹送系统皮带间距试验
4.2.1 试验方法与指标 试验过程中,皮带速度设定为150 mm/s,剖切深度以剖开上唇不剖开下唇为基准。通过调节夹送系统夹板以皮带间距L为试验因素,以剖切过程中进料成功率a、平稳剖切率b、出料成功率c作为试验指标。L的取值范围在鱼体刚好能顺利夹送到鱼体将要无法顺利喂入之间取5个水平。共采用25尾鲢鱼进行试验,每个水平3次重复试验。
对于试验中定性指标的准确定义为:
(1) 顺利进料:将鱼体鱼头向出料方向自然放入喂料端的皮带间,皮带能自动将鱼体卷入则为能顺利进料。
(2) 平稳剖切:在鱼体克服刀盘剪切力经过刀盘位置的运动过程中,若没有出现鱼头或鱼尾大幅度翻转使得鱼体无法继续在夹送皮带带动下前进为平稳剖切。
(3) 顺利出料:鱼体在切剖完成后,鱼头通过夹送系统弹簧柱塞整列能自动从托鱼槽的卸料斜槽滑落为顺利出料。
4.2.2 试验结果与分析 由表1可知:皮带间距为L=40 mm时剖切效果最佳。

表1 不同皮带间距剖切效果试验结果
4.3 剖切系统刀盘高度试验
4.3.1 试验方法与指标 以刀盘高度S(见图8)为试验因素。以鱼体剖开率(剖切长度/鱼体体长)和剖切质量(感官评价)为试验指标。S取值介于未切开鱼腹部腔体的刀盘高度剖切过程使内脏大部分严重受损的刀盘高度之间(220,210,200,190,180 mm)。每个水平取3尾鱼进行重复试验。

1. 托鱼槽 2. 刀盘
4.3.2 试验结果与分析 由表2可知:① 刀盘高度对白鲢剖开率的影响极显著(P<0.01);② 刀盘高度逐渐下降的过程中,剖开率逐渐增大,在220,210,200 mm水平下鱼体头骨不能完全剖开,鱼体背部也不能完全向两侧平铺开。在190,180 mm水平下鱼体头部、背部均完全剖开,鱼背可轻易向两侧平铺;③ 只有220 mm水平下鱼鳔可确保保留,而在180 mm水平下鱼胆开始破损,将严重影响剖切后鱼的风味。故180 mm水平不适用于剖切白鲢。
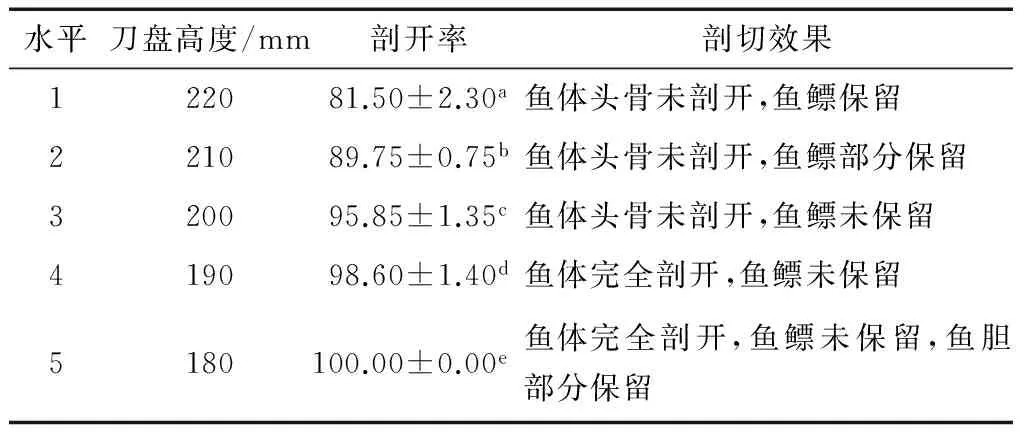
表2 剖鱼机剖切系统刀盘高度试验结果†
† 同列不同的上标字母表示经多重比较(新复极差法)具有显著差异(P<0.05)。
综合以上分析可得:过高的刀盘高度不能完全剖开鱼体,过低的刀盘高度会使鱼体鱼胆破裂,影响鱼肉风味。而鱼鳔也是一种比较受欢迎的食材,保留鱼鳔和完全剖开鱼体难以同时实现,因此需要根据不同的需求来选择完全剖开鱼体且不损伤鱼胆的刀盘高度和能保留住鱼鳔的刀盘高度。若要保留鱼鳔,刀盘高度水平取值范围为210 mm (1) 弹簧柱塞阵列提供夹持力的皮带夹送机构,能够保证鱼体在传送过程中的紧固和对中,确保剖切和出料过程顺利可靠,并对不同鱼种具有很强适应性,可针对0.5~3.0 kg常见淡水鱼进行加工。 (2) 夹送系统整体传动结构简单、效率高、两边皮带速度精确同步,且系统整体传动结构紧凑。 (3) 刀架可根据不同鱼种及剖切要求进行微调节,能更好地达到预期的剖切效果。 (4) 通过试验确定了针对(1.50±0.25) kg白鲢鱼的最优皮带间距及刀盘高度取值范围。 (5) 本装置实际加工效率较高,通过实验,加工效率可达1 200 尾/h,剖切效果达到预期。后续将继续优化主要部件并对不同鱼种及不同规格进行试验确定相应工艺参数,使该装置得以适应实际加工生产需要。 [1] 陈奇, 袁木平. 淡水鱼工业化生产的探讨[J]. 食品与机械, 2005, 21(1): 40-42. [2] 万鹏, 潘海兵, 龙长江, 等. 基于机器视觉技术淡水鱼品种在线识别装置设计[J]. 食品与机械, 2012, 28(6): 164-167. [3] 柏芸, 熊善柏. 我国淡水鱼加工业现状、问题与对策[J]. 湖北农业科学, 2010, 49(12): 3 159-3 161, 3 167. [4] 李楷模, 文跃兵. 视觉引导淡水鱼自动去头尾系统关键技术[J]. 食品与机械, 2014, 30(5): 141-143. [5] 励建荣, 马永钧. 中国水产品加工业的现状及发展[J]. 食品科技, 2008, 33(1): 1-4. [6] 胡晓亮, 陈庆余, 沈建. 竹筴鱼去脏加工用剖切刀具的优化试验[J]. 农业工程学报, 2014, 30(12): 270-277. [7] 陈庆余, 沈建, 欧阳杰, 等. 典型海产小杂鱼机械去脏试验[J]. 农业工程学报, 2013, 29(20): 278-285. [8] 彭三河, 徐武. 链式淡水鱼加工前处理装置的研制[J]. 食品与机械, 2013, 29(2): 139-142. [9] 朱国, 谭鹤群. 鱼体在剖鱼机夹片中受力有限元分析[J]. 农业工程学报, 2008, 24(4): 44-48. [10] 谭鹤群, 熊善柏, 张涛, 等. 一种链式淡水鱼剖鱼机: 中国, CN201123357[P]. 2008-10-01. [11] 谭鹤群, 高星星. 链式剖鱼机工艺参数优化试验[J]. 农业工程学报, 2011, 27(6): 332-336. [12] 黄兴元, 熊伟明, 京玉海, 等. 滚切式莲子剥壳机及其试验研究[J]. 食品与机械, 2012, 28(4): 139-142. Design of freshwater fish slitter by belt-clamp HUANG Peng-feiTANHe-qunZHANGChun-jiWANPengNIEJie (CollegeofMechanicalEngineeringHuazhongAgriculturalUniversity,Wuhan,Hubei430070,China) This study is about the design and manufacture of a new belt-clamp freshwater fish slitter which is based on the research of characteristic parameters ofhypophthalmichthysmolitrix.. The fish slitter consists of machine frame, nip-deliver system, cutting system. The key processing parameters of fish slitter can be adjusted, such as belt spacing of nip-deliver system, belt speed, circular saw height of cutting system. The rated power is 3.7 kW, consist of 1.5 kW cutting system motor and 2.2 kW nip-deliver system motor. The final results of experiments with (1.5±0.25) kghypophthalmichthysmolitrix: The level of belt spacing has significant impact on charging, cutting and discharging; it can be 100% success rate when the level of belt spacing isL=40 mm. The level of circular saw height has significant impact on cutting quality, for the fish fully cut open from the head to the tail requires circular saw height not more than 190 mm, for complete preservation of the swim bladder requires circular saw height not less than 210 mm, for not to destroy the fish bile requires circular saw height not less than 180 mm. The fish slitter running stable and has the best cutting quality when the level of belt spacing of nip-deliver system isL=40 mm, the level range of circular saw height of cutting system are from 180 mm to 190 mm. freshwater fish; slit; fish slitter; belt-clamp 10.13652/j.issn.1003-5788.2016.12.018 湖北省农业科技创新岗位课题(编号:4006-3671600304) 黄鹏飞,男,华中农业大学在读硕士研究生。 谭鹤群(1968—),男,华中农业大学副教授,博士。 E-mail:thq@mail.hzau.edu.cn 2016—11—155 结论
猜你喜欢
机械工程与自动化(2022年3期)2022-06-24
当代水产(2022年5期)2022-06-05
当代水产(2021年5期)2021-07-21
水电与抽水蓄能(2021年2期)2021-05-14
农业工程学报(2021年4期)2021-05-09
当代水产(2021年1期)2021-03-19
装备制造技术(2020年11期)2021-01-26
钻采工艺(2020年1期)2020-07-21
农业工程学报(2020年6期)2020-05-19
食品工业科技(2014年9期)2014-03-11
