脉冲型半导体激光测距关键技术研究进展
2016-02-07 08:24赵鑫王丹张贺邹永刚马晓辉韩立海一娜
长春理工大学学报(自然科学版) 2016年6期
赵鑫,王丹,张贺,邹永刚,马晓辉,韩立,海一娜
(长春理工大学高功率半导体激光器国家重点实验室,长春 130022)
脉冲型半导体激光测距关键技术研究进展
赵鑫,王丹,张贺,邹永刚,马晓辉,韩立,海一娜
(长春理工大学高功率半导体激光器国家重点实验室,长春 130022)
根据激光测距仪小型化、低功耗、智能化、高精度的发展方向,详细阐述了脉冲型半导体激光测距系统的测距原理及其基本结构,针对国内外在测量距离和测量精度方面的最新进展与发展现状进行了总结和评述,并在此基础上对系统中的时间间隔测量方法、回波信号的处理及检测方法等关键技术进行了详细的分析。随着激光测距技术不断优化提升,其将不断满足科学研究及工业、军事等实际应用领域对高精度测量的需求,据此展望了该种类型测距系统的研究方向及发展前景。
半导体;激光测距;时间间隔测量;回波信号
激光测距技术的发展经历了三代,以测距系统的激光器与探测器为标志,第一代是红宝石激光器和光电倍增管探测器,第二代是波长为1.06μm的Nd:YAG激光器和硅光电二极管或者雪崩光电二极管,第三代是1.54μm的饵玻璃激光器和波长为10.6μm的CO2激光器。发展到第二代的半导体激光器是以半导体为工作物质的一类激光器件,它具有易于与各种光电子器件实现光集成;能调节输出光束的波长使其工作在典型硅基光纤的低损耗、低色散区等优点。脉冲式的半导体激光测距系统由于其驱动电路简单,便于携带,快速、无合作目标且测程远,被广泛应用于军事领域,尤其在侦察和火控系统中应用最为普遍[1-2]。
在国外,图雅得、博士能、纽康和奥尔法等测距仪品牌最为知名。图雅得2013年BP型望远测距仪结合了高清望远镜以及测距功能,这一系列包括BP1200、BP1500及BP1800三款双筒机型。图雅得SP长距离系列望远测距仪是图雅得最为经典的系列,含有较多机型,该系列采用了图雅得在业界知名的第二代TrueOptics多层镀膜光学镜头以及第一代PSDP并行同步差位处理器。纽康在2000m以上的望远镜测距仪领域一直排名第一,该品牌中的LRB25000双筒测距望远镜是一款超远距离测量、一级人眼安全的激光测距仪,它采用铒玻璃激光技术,使激光测距能力达到了极限。表1对几种典型测距仪进行了比较[3-4]。
国内,民用激光测距仪发展缓慢,无论是在测量距离还是测量精度上都无法与国际上的先进水平相提并论。1996年到2011年间,上海光机所、中国计量学院、天津工业大学以及西安光机所等单位对脉冲型半导体激光测距系统的关键技术进行了相关研究。其中,上海光机所研制的半导体激光测距仪在10m到100m的测量范围内的测量精度为0.5m;中国计量学院与西安光机所分别于2000年和2011年在发射光束质量方面得到了相应的研究成果,光束所达到的峰值功率分别为10W和67.5W,脉冲宽度分别为25ns、20ns,其中,中国计量学院研制的一款便携式激光测距机测量范围可达到14~l000m,精度为1m[5-9]。针对目前脉冲型半导体激光测距系统的发展现状,本文将对系统中时间间隔测量方法、回波信号的检测和处理方法的研究进展进行较详细地介绍。

表1 典型脉冲型半导体激光测距仪
1 脉冲型激光测距系统的测距原理
脉冲激光测距仪的工作原理如图所示。它由激光发射系统、接收系统、门控电路。时钟脉冲振荡器及计数器组成。图1是脉冲测距仪原理方块图:
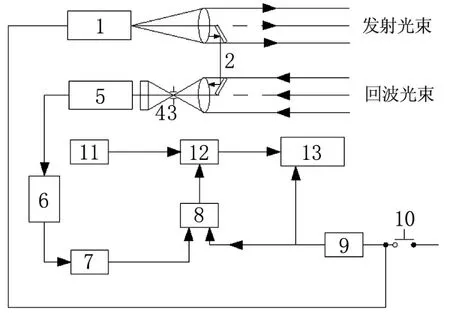
图1 脉冲激光测距系统原理方块图
其工作工程:当按动启动按钮10时,复原电路9给出复原信号使整机复原,准备进行测量;同时触发脉冲激光器1,产生激光脉冲,该激光脉冲除一小部分能量由取样器2直接送到接收器(把此信号称为参考信号)外,绝大部分激光能量反射回到接收系统得到回波信号(或测距信号)。参考信号及回波信号先后经过小孔光阑3和干涉滤光片4聚焦到光电检测器5上变换成电脉冲信号[10-11]。
2 脉冲型激光测距系统中的关键技术
测距系统的脉冲上升沿上叠加的噪声会使其穿越比较阈值的时间发生变化,会产生时间的抖动,并带来误差,因此信号上升沿会对测距性能产生较大影响,除此之外,影响测距系统精确度并对测量距离起决定性作用的关键因素主要包括三点,分别为:时间间隔测量方法、回波信号的去噪声处理方法以及回波信号检测方法。时间间隔的测量是指计时模块对起止信号之间的时间差的测量,将测得的时间差与激光在大气中的传播速度相乘可得被测距离。外部测量环境以及系统内部电路抖动的干扰造成回波信号弱且噪声大,因此,将回波信号输入算法滤波器进行去噪声处理可优化信号波形,有效提高信号利用率。时刻鉴别电路对去噪后的回波信号进行检测从而判别计时终止时间,检测方法的选择影响着终止时刻的准确与否,因而对回波信号处理、检测方法进行研究,是提高整个测距性能的关键技术。
2.1 时间间隔测量方法
现有的最基本的时间间隔测量方法主要有数字计数法、模拟法、插值法[12]。数字计数法根据其原理可使用时钟脉冲信号计数,该种方法原理简单,测量距离较远,但时钟脉冲信号频率较低,测量精度不能达到测距系统的需求;模拟法将时间间隔的测量转化为电压、电荷、频率和相位等物理变化量,通过测量上述对应物理量的变化值间接计算出时间间隔,该种方法较之数字计数法虽然在精度上有所提高,但是测量距离有限;插值法将数字计数法和模拟法有效结合,通过模拟法提高系统的测量精度,通过数字计数法增大测量范围[13-17]。为了进一步提高测量距离以及测距精度,在这三种最基本的时间间隔测量方法的基础上,多种新的测量方法被提出。
冯志辉等提出的FPGA延迟线插入法是在直接计数法的基础上,采用FPGA内部延时单元将时间间隔转化为数字量,经高速锁存器锁存后得到代表延时信息的温度计编码值来实现高分辨率的时间测量[18]。此种方法在2~7m范围内的误差为±10cm,并可将单次时间间隔测量误差提高到80ps,多次测量可达40ps。
岱钦等设计了一种基于FPGA和TDC-GP21的高速精密时间间隔测量方法[19],如图2所示。FPGA具有高频稳定的特点,TDC-GP21可以实现高精度测量。结合二者的优点完成了时间间隔测量之后对测量结果进行校准测量即补偿修正从而达到进一步提高系统的测量精度的目的。经过该测量方法后系统达到了1Hz重复频率,精度达±100ps。
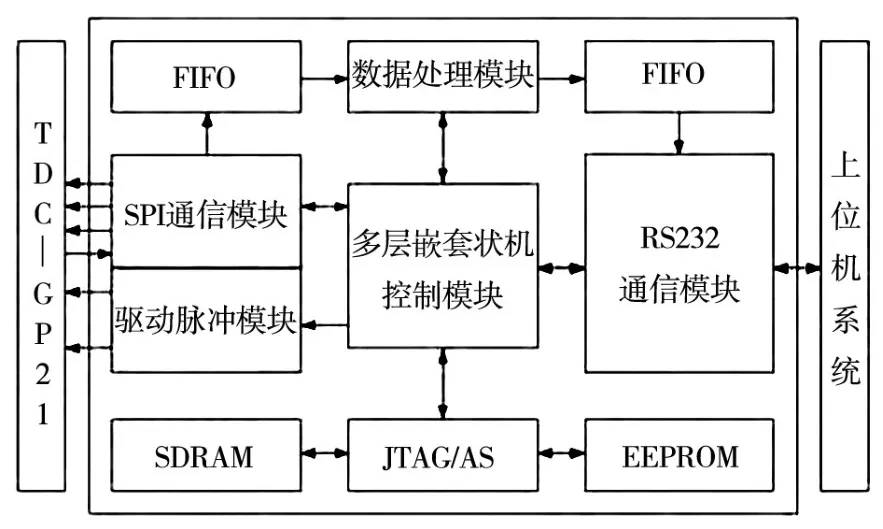
图2 时间间隔测量系统方框图
施智勇等提出了延时法,该方法采用了FPGA及安森美半导体公司生产的可编程延迟芯片MC100EP195[20]。如图3所示,其中,FPGA可产生10ns及整数倍的时延,MC100EP195可产生50ps~9.95ns的时延,即通过调整延时芯片和机械位移产生的电信号的延时时间。由实验结果可得,当被测距离在100m内,系统误差为0.03mm。
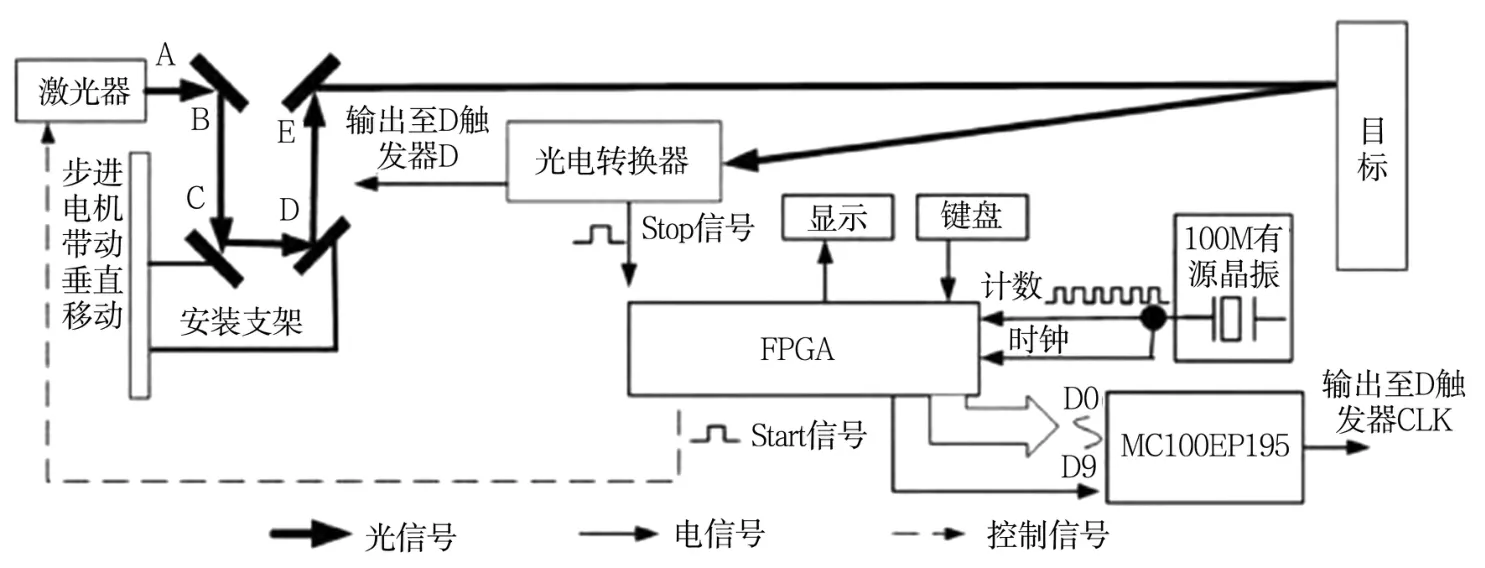
图3 延时法时间间隔测量法的测距系统原理图
宋建辉等提出了一种可在FPGA中实现的、由脉冲计数法、多相采样法和延迟链法相结合的混合时间间隔测量方法[21]。脉冲计数法可以使得系统达到较远的测量距离,多相采样较大测量范围的基础上提高测量分辨率,延迟链法对微小时间进行测量。该种测量方法在激光测距100m以内,时间间隔误差为0.07ns。
陈昭等提出了采用两次测距并将结果做差的测量方法来提高测距系统的测量精度[22]。将任一非目标物体放置在激光测距系统发射模块的端口处,测量结果为S1;对目标物体进行测量,此时的测量结果为S2,并将S1与S2的做差。该方法不仅可以提高系统的测量精度,还可以简化脉冲激光测距系统。使用该方法可以抵消全部系统误差包括固定延时误差以及距离行走误差,且抵消部分系统中的随机误差即时间间隔测量误差阈值芯片的输出抖动误差以及时刻鉴别抖动误差。此方法虽然很大程度上提高了测量精度,但是单次测距结果需要进行两次测量,需要进一步完善。
目前,多数时间间隔测量方法都是基于FPGA的,在一定程度上提高了时间间隔测量精度,最好可达到40ps~80ps,虽然远不及国际上的先进测距技术,但是对于100m左右的近中程距离的测量,系统误差最低为0.03mm。
2.2 回波信号降噪处理方法
由于在测距过程中受到半导体激光器的发射功率、大气传输、目标反射特性、探测器噪声和放大电路抖动噪声等因素影响使放大电路输出的信号不是一个稳定值,其幅度、上升时间、信噪比都带有一定的随机性,这些随机因素造成了系统的随机误差,其中回波信号的信噪比决定了系统的单次测距精度[23-28]。
李黎明等用递归平均的方法对半导体激光测距机距离测量数据进行处理,该方法在保证信号全局性的基础上,突出了“低通”的特性,使测试信号曲线趋于平滑。信号平滑的程度最大时,对局部高频信号的变化起到抑制作用[29]。因此当信号变化较缓慢时,可以采用该方法进行处理,且输出信号频率与采样频率相同,满足系统实时性的要求。
回波信号处理流程图如图4所示,用250MHz频率回波信号进行N(N为发射脉冲个数)次采集,每次釆集时间为8.192μs,数据量为2084个1bit的数据,将该数据存储于FPGA中构造的FIFO中,并在FPGA进行Haar小波变换域LMS自适应滤波和回波信号相关检测,将所得结果与门限值K做比较,如果结果大于K则认为是有用信号[30]。
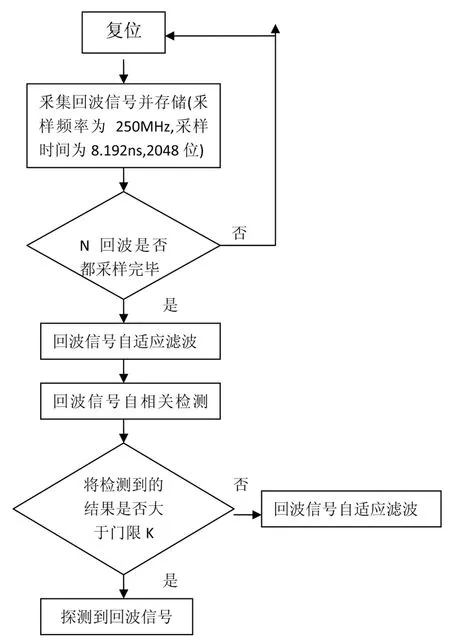
图4 回波信号处理流程图
张廷华等所做研究中的激光测距系统是多脉冲型,根据该类测距系统回波信号的特点,提出了一种平滑滤波与三阶累积量相结合的信号处理方法,首先采用平滑滤波算法对回波信号进行预处理,再经过三阶累积量运算,可有效地抑制噪声,提高探测概率,为多脉冲激光测距或脉冲激光器提高作用距离,降低虚警概率提供了有效的回波信号处理方法[31]。该算法简单有效,运算量小,适于硬件实时实现。
对回波信号进行处理意在提高信噪比从而实现测距精度,目前多数回波信号的处理方法都是根据测距系统的特点将回波信号输入设计的算法滤波器后,从系统内部实现降噪。
2.3 回波信号的检测方法
在脉冲激光测距系统中,飞行时间(TOF)的测量取决于半导体激光器发出脉冲的上升沿、下降沿及时间宽度等因素,飞行时间的测量对应于系统的作用距离,因而,脉冲质量也决定了测距系统的距离极限;回波信号的探测直接影响测距系统整体的测量精度。相较于相位法,干涉法以及三角法,脉冲法激光测距对回波信号的波形相对较低[32-34]。但是,当回波信号质量较差时即回波信号的信噪比较低时,简单的回波信号探测方法将无法满足脉冲激光测距系统的需要,因此,高精度回波信号探测方法就成为人们广泛关注的研究课题。
龙腾宇等从脉冲激光微弱回波信号的统计特性出发,基于单脉冲自相关法和脉冲串互相关法在远程激光测距中的局限性,提出了单脉冲互相关叠加的方法[35]。即先对回波信号进行互相关运算,然后对某一个时间段内已进行互相关运算的回波信号进行多次叠加运算,直到强度满足阈值要求。图5为该方法的工作流程图。
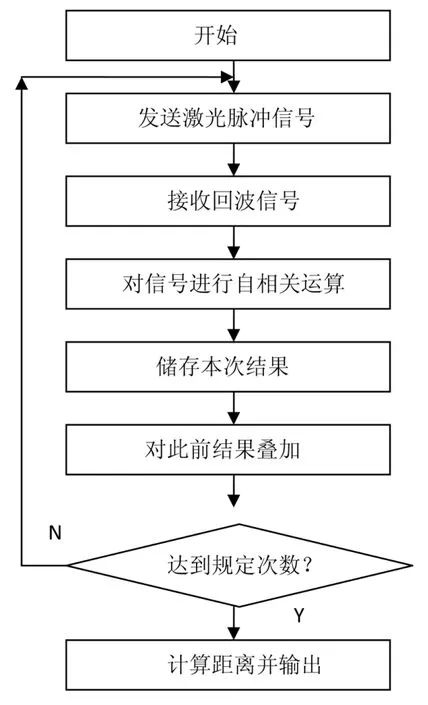
图5 脉冲串互相关法工作流程图
刘慧慧等针对远距离脉冲激光测距系统,提出了一种多脉冲互相关叠加的微弱信号的提取方法,即对某时间段内的脉冲回波信号进行互相关叠加,利用噪声的不相关性,达到增加信号的强度,以提高信噪比,降低误警率[36]。其相关运算图如图6所示。
图6中M为单个周期信号的采样点数,N为脉冲个数,则对N个信号进行互相关运算,得到的回波信号的信噪比提高了N倍[36-38]。龙腾宇等和刘慧慧等所提出的回波信号检测方法都可以使测距系统将原来不足300m的探测距离提高到1000m以上。
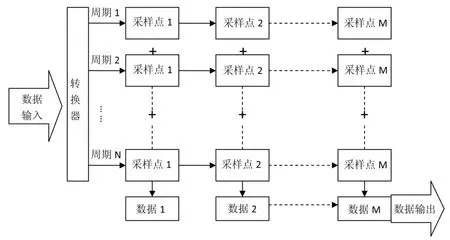
图6 脉冲互相关叠加运算图
倪旭翔等提出了一种基于发射脉冲串与回波脉冲串互相关的信号处理方法[39]。该方法同时将一组发射脉冲信号与回波脉冲信号同时转换成数字信号,并作为一次测距结果进行互相关处理。能够有效提高回波信号的信噪比。经过实验证实,这种处理方法能将回波信号的信噪比由0.11提升到5.92。
T.Saito等提出了利用半导体激光器的频率噪声来进行激光测距[40]。在光束传播过程中,作者将半导体激光器的振荡频率转化为Rb吸收线并且将频率噪声转化为强度噪声,通过频率鉴频器观察发现,沿着两个方向传播的光束有着共同的强度噪声,但是会有时间延迟。通过计算这两个信号的互相关性后发现,相关性最高的点对应于两条光路的光程差。文章通过实验证明了,当信号的采样率为0.2ns时,对50m的距离进行测量,其分辨率为0.03m。图7是实验装置图。
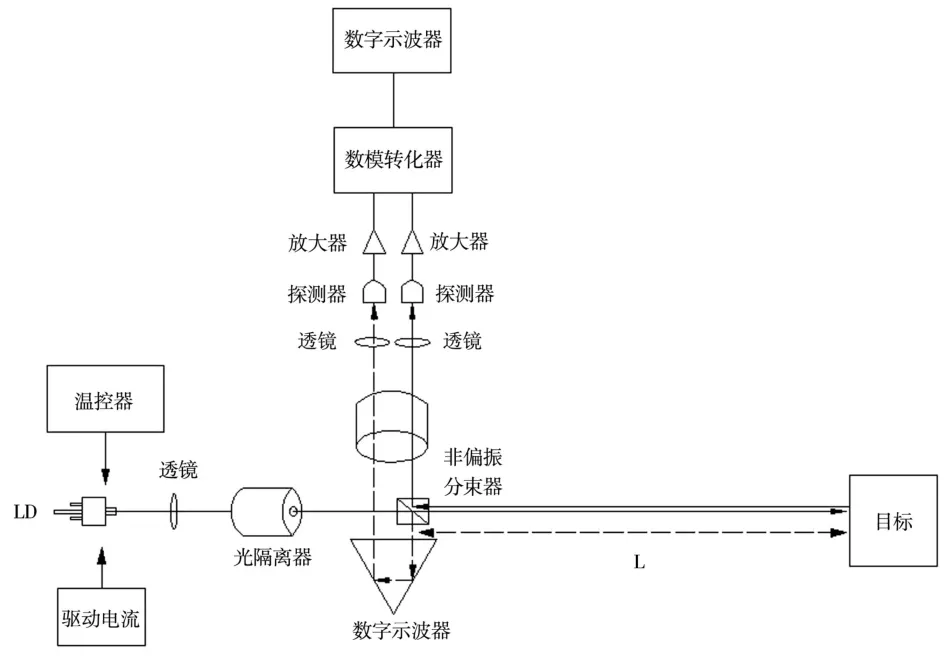
图7 利用半导体激光器的频率噪声进行测距的实验装置图
电流驱动器给半导体激光器提供一个恒定的注入电流,发出的激光经过准直透镜。为了避免回波散射,准直透镜后放置一个光隔离器。NPBS(非偏振分束器)将发射光束分成参考光束与测量光束,鉴频器将这两束光扩大后被准直到APD1及APD2上,通过APD的随机信号射频放大器后,从50MHz放大到8GHz。放大后的信号经过数模转化器(A-D convertor)显示在8-bit的数字示波器上。最高相干系数对应的时间差表明了两个信号的时间延迟,将延迟的时间与光速相乘就可以计算出目标距离[40-42]。
王誉鹏等提出了一种基于m序列的小型化半导体激光测距方案[43]。以单周期m序列作为激光发射波形,对微弱低信噪比回波信号采用相参积累及匹配滤波相结合的数字信号处理方法,采用单周期m序列代替单脉冲,即在每个脉冲重复周期内均发射呈单周期m序列波形的激光,可以在保证测距精度的同时获得更远的作用距离[43-44]。
随着测量距离的增加,回波信号的质量将会降低。通过提高探测器的探测灵敏度、光束准直以及回波信号数据处理来弥补回波信号差的缺点,通过完善探测方法提高回波信号的质量相对是一种简单易行的处理方法,目前,主要是将多个回波信号串互相关叠加,达到加强信号的目的。
3 发展趋势及工作展望
近年来的研究表明,国内的脉冲激光测距技术发展缓慢,无法与国外的发展水平相提并论,这样的现状导致了便携式民用半导体激光测距仪的价格昂贵而无法被广泛使用。国际上,测量距离远并且测量精度高的测距仪依然集中于图雅得、博士能、纽康和奥尔法等国外知名品牌;国内应用于空间测距的脉冲型激光测距仪虽然发展迅速,关键技术已经达到国内外尖端水平,但其成本高,体积大,制作周期长仍然是无法克服的难题。
关于脉冲型半导体激光测距的关键技术主要集中在接收模块的时间间隔测量方法、回波信号的探测以及处理方法,而发射系统的窄脉冲驱动电路以及接收准直光学系统的相关研究相对较少。其中,多样的回波信号探测方法以及时间间隔测量方法将会是提高激光测距系统性能的必经之路。
半导体激光器的诸多优点提高了激光测距仪多方面的性能,但是其相应的局限性导致测距系统的回波信号微弱,改变回波信号的检测方法不仅具有更高的可行性,而且性能提升效果好。通过借鉴现有的针对不同波长,不同周期的回波信号检测方法的基本原理,实现方法可以提高激光测距仪测量数据的可靠性。回波信号的检测方法决定了测量距离的远近,而时间间隔测量方法决定了整个测距系统的测量精度。目前,多数时间间隔测量方法是基于可编程逻辑芯片,例如FPGA、TDC-GP2和TDC-GP21等。
值得注意的是,半导体激光测距是一种系统性技术,系统中各个关键技术之间紧密相连,相互制约。例如,准直透镜不仅要控制发射光束的发散角,且不能影响发射激光的功率,以此保证测距系统的测量距离,而这两种性能指标相互矛盾;回波信号的检测要在性噪比很高的情况下提高回波信号的强度,同时还要保证测距效率,现有的回波信号检测方法虽然能提高测量距离,但多次回波信号叠加后进行检测无疑降低了测量效率。因此,未来脉冲激光测距的研究不仅要着眼于每项技术的发展,还要注意测距系统内各项技术之间的匹配性。
4 结论
目前,国际上脉冲型半导体激光测距系统无论是在关键技术还是在测量性能方面已取得了长足的发展并以其独特的优点在不同领域得到了广泛的肯定。国内,用于卫星观测的测距系统测量精度高测量距离远,而用于大地测量的测距系统均属于中远程,500m左右的测量距离可达到0.5m的测量精度;测量距离为500m~1000m时,测量精度为1m;被测距离大于1000m时就系统就失去了可靠性。随着各项技术的优化提升,脉冲型半导体激光测距仪会逐渐满足人们对于其便携,低成本和性能良好的一系列要求而被广泛应用于交通安全,工业建筑等。
[1]朱京平.光电子技术基础(第二版)[M].北京:科学出版社,2009:85-91
[2]张金胜.高功率半导体激光器结构研究[D].长春:长春光学精密机械与物理研究所,2014.
[3]吴应明.便携式脉冲激光测距仪的研制[D].西安:西安电子科技大学,2009.
[4]朱志忠.基于TDC-GP2的便携式脉冲激光测距仪研究[D].长春:长春理工大学,2012.
[5]张在宣,郭宁,余向东,等.小型低值LD激光测距仪的研制[J].应用光学,2000(SI):9-14.
[6]李志勇,王辅忠,张海明,等.利用TDC-GP2优化脉冲激光测距系统性能[J].兰州大学学报:自然科学版,2008(S1):4-7.
[7]阎得科,孙传东,冯莉,等.高功率窄脉宽半导体激光激励器设计[J].应用光学,2011,32(01):165-169.
[8]王古常,孙斌.军用脉冲激光测距技术与研究现状[J].中国测控网,2010,11(5):71-73.
[9]李军.基于FPGA的高精度脉冲激光测距系统研究[D].西安:西安工业大学,2014.
[10]郭培源,付扬.光电机侧技术与应用(第二版)[M].北京:北京航空航天大学出版社,2011:126-127
[11]刘相宏.脉冲式半导体激光测距系统的设计[D].呼和浩特:内蒙古大学,2014.
[12]王洪喆,辛德胜,张剑家,等.脉冲激光测距时间间隔测量技术[J].强激光与粒子束,2010(08):1751-1754.
[13]B.Al-Qudsi,A.A.H.Ameri,A.Bangert.Low cost highlyprecision time interval measurementunit for radar applications[C].Microwave Conference,2012,1-4.
[14]袁堂龙.小型脉冲式激光测距系统研究[D].西安:西安理工大学,2008:30-43.
[15]陈瑞强,江月松.脉冲激光测距的时间间隔测量方法[J].光学学报,2013(02):106-111.
[16]杨佩.基于TDC-GP2的高精度脉冲激光测距系统研究[D].西安:西安电子科技大学,2010:39-43.
[17]黄旭.基于TDC-GP2的远距离脉冲式激光测距的研究[D].北京:北京交通大学,2012:41-43.
[18]冯志辉,刘恩海,岳永坚.基于FPGA延迟线插入法的半导体激光测距[J].光电工程,2010(04):53-59.
[19]岱钦,毛有明,吴凯旋,等.脉冲激光测距中高速精密时间间隔测量研究[J].液晶与显示,2015,01:83-87.
[20]施智勇,潘晓声,张谦.利用延时法进行高精度脉冲激光测距[J].光学精密工程,2014(02):252-258.
[21]宋建辉,袁峰,丁振良.脉冲激光测距中高精度时间间隔的测量[J].光学精密工程,2009(05):1046-1050.
[22]陈昭,刘继勇.低测量误差脉冲激光测距系统设计[J].计算机与数字工程,2015(02):340-342.
[23]杨洋.脉冲激光测距雷达回波信号统计特性研究[D].南京:南京理工大学,2010:15-19.
[24]Zhong Kai,Wang Yuye,Xu Degang,et al.Efficient compound-cavity eye-safe KTP-OPO at 1.57μm pumped by an electro-optic Q-switched Nd:YAG Laser[J].ChinesePhysicsLetters,2009,26(6):064210.
[25]Ma M,Guo F,Cao Z,et al.Development of an artificial compound eye system for three-dimensional object detection[J].M Applied optics,2014,53(6):1166-1172.
[26]陈向成.脉冲激光雷达回波处理方法与系统研究[D].合肥:中国科学技术大学,2015:25-33.
[27]Chen X,Wang K,Mei T,et al.Novel multi-pulses technology for pulse Laser[J].Microwave and Optical Technology Letters,2015,57(7):1614-1620.
[28]赵晟娅.高精度激光并行测距系统信号检测与处理技术[D].大连:大连海事大学,2014:29-31.
[29]李黎明.半导体激光测距机中的信号处理方案[D].成都:电子科技大学,2008:25-30.
[30]蔡红霞.脉冲式激光测距系统研究[D].西安:西安工业大学,2014:34-46.
[31]张廷华,樊桂花,何永华.多脉冲激光回波信号处理方法研究[J].装备指挥技术学院学报,2011:01:93-96.
[32]程勇杰.半导体激光测距系统关键技术研究[D].长春:长春理工大学,2013:30-31
[33]李孝辉,杨旭海,刘娅,等.时间频率信号的精密测量[M].北京:科学出版社.2010:76-100.
[34]韩国荣,吴长瑞,张新胜.FPGA在高速实时采集系统中的应用[J].测量技术,2012,31(5):60-64.
[35]龙腾宇,黄民双,孙丽妍,等.单脉冲互相关累积法在激光脉冲远程测距中的应用[J].北京石油化工学院学报,2013(03):18-22.
[36]刘慧慧,张泽,梁天太.多脉冲互相关检测法在远距离脉冲激光测距中的应用[J].新技术新工艺,2015(07):140-142.
[37]Thiel K,Wehr A,Hug C.A new algorithm for processing full wave laser scanner data[M].Porto:EARSEL 3D-Remot Sensing Workshop,2005.
[38]Jutzi B,Stilla U,Percise range estimation on know surface by analysis of full-waveform laser[C].Istanbul:SymposiumofISPRScommission,2006: 24-239.
[39]倪旭翔,胡凯.脉冲串互相关方法在远程激光测距中的应用[J].光学学报,2012(11):128-133.
[40]Saito T,Kondo K,Tokutake Y,et al.Optical range finder using semiconductor laser frequency noise[J]. Spie Optical Engineering+Applications,2015,8725(42):7111-7116.
[41]Baetz W,Braasch J,Holzapfel W.Noise-Modulated OptomechatronicDistance-MeasuringSystem,Industrial Electronics,IEEE Transactions on,2005,52(4),944-952.
[42]Maehara S,Kawakami K,Arai H,et al.Frequency noise characteristics of a diode laser and its application to physical random number generation[J]. Optical Engineering,52(1)(2013).
[43]王誉鹏,赵梁博,余开国.基于m序列的半导体激光测距技术研究与仿真[J].激光与红外,2016(02):156-164.
[44]数字信号处理的FPGA实现[M].北京:清华大学出版社,2011.
Research Progress on Key Technologies of Pulsed Semiconductor Laser Ranging
ZHAO Xin,WANG Dan,ZOU Yonggang,MA Xiaohui,HAN Li,HAI Yina
(State Key Laboratory on High Power Semiconductor Lasers,Changchun University of Science and Technology,Changchun 130022)
According to the development direction of the laser rangefinder miniaturization,low power consumption,intelligent and high precision,this paper describes the basic structure and principle of ranging pulse type semiconductor laser ranging system,According to the latest progress and development of the status quo at home and abroad,measuring distance and measuring precision are summarized and discussed.On the basis of this,method of the time interval measurement of the system,the processing of the echo signal and the detection method are analyzed in detail.With the continuous improvement of laser ranging technology,it will continue to meet the demand for high precision measurement of the application fields of scientific research and industrial,military and so on,this paper discusses the research direction of this kind of measurement system and development prospect.
semiconductor;laser ranging;time-interval measurement;echo signal
TNTN209
A
1672-9870(2016)06-0009-07
2016-06-27
赵鑫(1988-),男,硕士,实习研究员,E-mail:zhaoxin@cust.edu.cn
张贺(1985-),男,博士,助理研究员,E-mail:zhhe920@sina.com
猜你喜欢
河北省科学院学报(2020年4期)2020-03-19
科学(2020年6期)2020-02-06
科学(2020年3期)2020-01-06
测控技术(2018年6期)2018-11-25
通信电源技术(2018年5期)2018-08-23
制导与引信(2017年3期)2017-11-02
电子制作(2017年7期)2017-06-05
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年2期)2016-11-07
工业设计(2016年4期)2016-05-04