一对多激光通信技术在编队飞行星座中的应用
2016-02-07 08:24江伦李娜付强王超刘壮李英超张立中姜会林
长春理工大学学报(自然科学版) 2016年6期
江伦,李娜,付强,王超,刘壮,李英超,张立中,姜会林
(1.长春理工大学空地激光通信技术国防重点学科实验室,长春 130022;2.长春狮凯科技产业有限责任公司,长春 130022)
一对多激光通信技术在编队飞行星座中的应用
江伦1,李娜2,付强1,王超1,刘壮1,李英超1,张立中1,姜会林1
(1.长春理工大学空地激光通信技术国防重点学科实验室,长春 130022;2.长春狮凯科技产业有限责任公司,长春 130022)
基于旋转抛物面基底的多反射镜拼接光学天线,提出一种一对二激光通信组网方案,并对系统工作过程进行了分析,对星间激光通信链路进行了功率裕量计算。分析结果表明:一对二激光通信距离达200km,通信速率为2.5Gbps。该方案可为编队飞行星座内通信组网提供了一种新的技术途径。
编队飞行;一对多激光通信;通信网络
编队飞行星座是指以某一主星为基准,旁边有多颗卫星围绕主星飞行的星群,它们飞行时组成特定的编队,以分布方式构成一个“虚拟大卫星”[1],每颗卫星之间通过星间通信相互联系、协同工作来实现信息采集、处理和有效载荷任务,其实质上构成一个满足任务需要的规模较大的虚拟传感器或探测器。与传统的大卫星相比,编队飞行星座内卫星具有体积小、研制灵活、发射成本低和抗干扰与抗摧毁能力强等优点[2]。
自上世纪九十年代以来,美国等航天大国非常重视编队飞行技术,开展了多项编队飞行卫星计划。NASA和美国国防部1998年启动大学纳卫星计划,由10所大学提出5项纳卫星编队飞行计划,其首颗对地观测卫星(Earth Observing-1)于2001年11月21日发射,与已在轨的对地观测卫星进行编队飞行。此外,美国的“天基雷达监视计划”基本配置由24颗低轨卫星和三颗备份星组成星座,24颗卫星组网形成8个轨道平面,每一轨道平面上有3颗卫星。我国也在编队飞行卫星上开展了相关工作,如“实践五号”,“清华一号”都已成功发射[3]。编队飞行星座内卫星之间需进行通信以实现星间的信息传输与交换。如飞行主星将系统定时、频标和控制指令、交换信息传送给编队飞行子星,编队飞行子星把子星传感器采集的信息传给编队飞行主卫星。目前编队飞行星座内卫星之间通信多采用微波通信,如“铱”卫星系统中每颗星均可以和前后2颗以及左右2个轨道面上的4颗卫星进行通信,通信速率为200Mbps,使用的即是微波通信技术。但未来的星间高速数据传输需求会越来越高,微波通信由于频带受限导致通信速率低、易受电磁干扰等缺点很难满足要求,激光通信具有高带宽、高传输速率等优点,可有效克服微波传输存在的上述问题[3-7],是编队飞行星座内通信的最佳技术途径。
但传统的激光通信是点对点单一通信模式,星座内卫星之间进行激光通信需要实现一点对多点激光通信,以便在星座内构建空间激光通信网络。美国2001年提出了“TSAT(transformational satellite communication system)”计划[8],其中的激光通信即是一对多,预计通信速率10-40Gbps,日本提出激光与微波通信相结合的双层低轨道(700和2000公里)全球通信组网方案[9],其上层采用激光通信,下层微波网方案,但均没有见到一对多激光通信技术的具体报道。美国Ernest Clarke等人提出一种高轨卫通信卫星与多个低轨用户星同时进行空间激光通信的方案[10,11],高轨激光通信载荷采用透射式镜头作为激光通信光学天线,视场可实现对低轨用户星全覆盖,通过在天线焦平面上移动探测器实现与对应低轨用户星的通信,未见后续试验报道。国内姜会林团队提出以旋转抛物面为基底的多反射镜拼接结构作为光学天线的方案[12,13],并实现了室内“一对二”同时激光通信,通信速率达到2.5Gbps,通信范围方位为360°,俯仰为38°。
本文针对某编队飞行星座内高速率通信的需求,分析该编队飞行卫星链路特点,对其进行了链路设计,采用新的思路解决该编队飞行星座内的通信组网难题。
1 编队飞行星座轨道特性分析
编队飞行星座为三星星座,分布在两个同高度、交角很小的轨道上,轨道高度为1000km,卫星A、B在同一轨道上,相对位置固定,卫星C在另一条轨道上,该编队飞行星座的轨道示意图如图1所示,其运动轨迹如图2所示。卫星A、B与卫星C的运动轨迹有交叉,不同时刻(T1时刻与T2时刻)的运动轨迹平面简图如图3所示,卫星A、B相对卫星C的方位角度最大为±65°,俯仰角度最大为±15°(考虑卫星高度漂移、姿态变化等因素)。
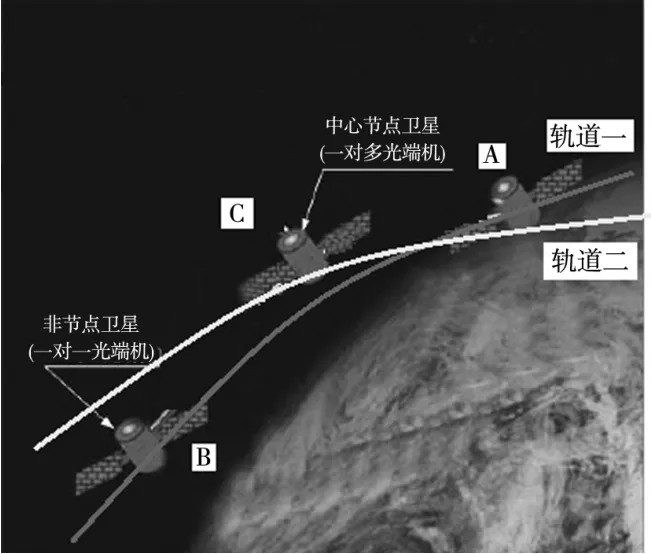
图1 编队飞行星座的轨道示意图

图2 编队飞行星座的运动轨道示意图
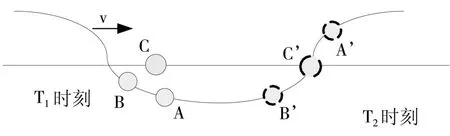
图3 编队飞行星座的运动平面轨迹简图
2 编队飞行星座星间链路组成
多点间激光通信系统主要应用于卫星群间保密、实时通信,其特点是星群整体运动轨迹固定,群内卫星相对位置变化、且间距较近,卫星借助一定的动力条件维持自身编队位置。卫星群内有三颗卫星,一个中心节点卫星搭载“一对多”主光端机,称为“主星”。另外两个卫星搭载从光端机,称为“辅星”,则可实现三颗卫星的“一对多”激光通信,通信链路如图4所示。

图4 多卫星间激光通信链路示意图
针对编队飞行星座,以C为主星,则同轨道卫星A、卫星B为辅星。由于卫星在不停的运动,不同时刻(T1时刻与T2时刻)主星C与辅星A、辅星B的相对位置发生变化,从而需要在动态拓扑结构下建立链路。建立的多点激光通信链路示意图如图5所示。主星C与辅星A、辅星B可同时进行激光通信,且均为双工通信。
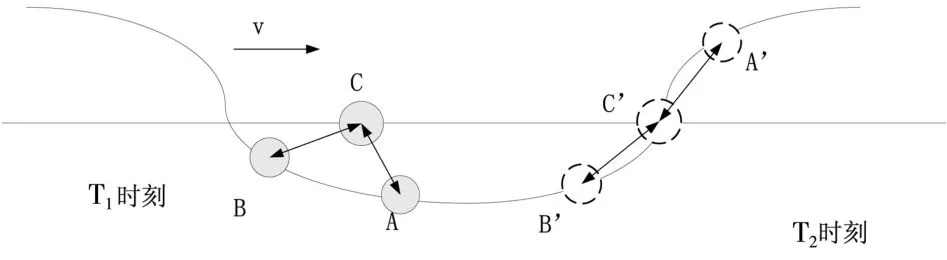
图5 编队飞行星座内激光通信链路示意图
3 编队飞行星座星间通信链路设计
3.1 主星激光通信系统方案
根据编队飞行星座的链路特性分析与链路通信要求可知,主星激光通信系统需具备“一对二”激光通信的能力,其光学天线采用本文提出的以旋转抛物面为基底的多反射镜拼接结构,其总体方案如图6所示。整个光端机光学系统包含三个分系统,一是光学天线分系统,二是中继光学分系统,三是后续子光路分系统。根据任务需求,任务确定为1对2通信,所以反射镜的数量设为两片,主光端机拟采用“一对二”同时发射一个信标光和通信光的体制,还采用单探测器粗精复合探测技术,尽量减小体积、重量和功耗。
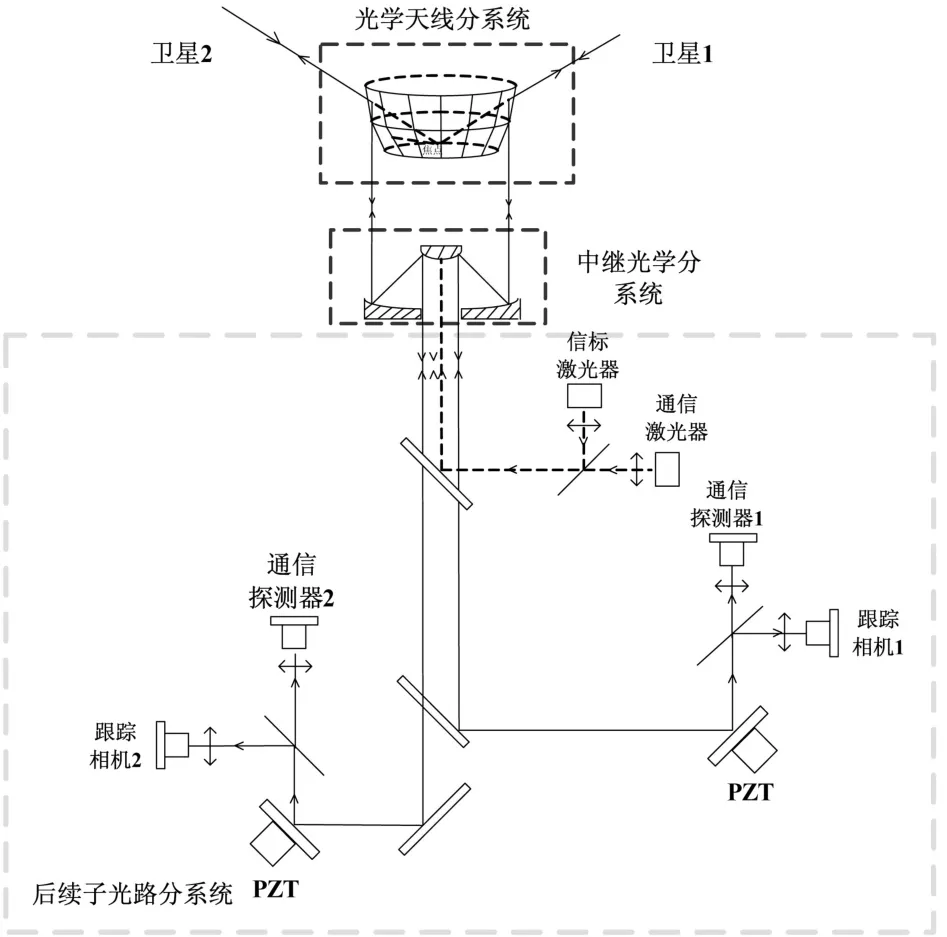
图6 主星激光通信系统总体方案图
主光学天线为保证能量接收效率,设计为以抛物面为基底的多反射镜拼接结构。每一块反射镜都由一个APT执行机构所控制,完成目标的稳定跟踪和通信。不同轨道的信号光束,以不同入射角照射到多反射镜拼接光学天线上,只有与入射光角度匹配的反射镜能将光束在后续光学系统视场范围内以平行光反射到中继光学系统上,然后经过中继光学系统缩小了口径,进入到后续子光路分系统。后续子光路分系统中采用高陡度带通滤光片,将进入系统中的光进行分离,使得进入各子支路的光既包含800nm波段,又包含1550nm波段,其中800nm波段作为信标光(信标发射、接收),1550nm波段作为高速通信光(通信发射、接收)。主光端机采用广播式信标光与通信光发射;各支路采用大视场粗跟踪,配合从光端机大束散角信标光进行双向捕获,待捕获完成,稳定粗跟踪后,系统发射信标光,从光端机再进行捕获、粗跟踪、精跟踪。最后实现双向通信。
3.2 系统工作工程
系统工作过程如图7所示。

图7 一对多激光通信系统工作流程图
(1)多点引导指向:借助GPS/INS确定各目标的位置、姿态与运动轨道,调整主光端机的空间坐标。激光通信终端根据通信指令,从休眠状态进入工作状态。初步制定通信开始时间、通信持续时间;终端生成与扫描捕获相关的各种控制参数;完成对各部分初始化工作,如粗跟踪CCD相机需要设置控制命令参数、GPS测姿定位单元需要提前预热准备,信标激光器需要提前开启等。所有分系统和单元需要自检工作,自检工作完成后,方可正式进行链路通信。
(2)多点捕获对准:根据多目标的位置、姿态和运动轨道,确定和粗调对应的工作反射镜,实现捕获并对准。从光端机启动粗信标光,此信标光的束散角取决于开环捕获不确定区域;然后向主光端机发送【捕获】命令;主光端机收到【捕获】命令后以当前的惯性空间为中心进行3×3螺旋光栅扫描(从高概率向低概率扫描,减小捕获时间),直到搜索到对方信标光斑。
(3)粗跟踪:使工作反射镜的旋转能跟上通信目标的运动及振动与姿态变化,跟踪精度达50μrad左右。如果捕获成功,主光端机立即停止扫描状态,进入粗跟踪状态,并且保证可靠粗跟踪,这就实现了主光端机的视轴对准;向从光端机返回捕获成功标志位,然后主光端机启动信标光,也实现了从光端机视轴的对准,进而实现双端光闭环跟踪。
(4)精跟踪:利用快速振镜对跟踪残余误差进一步抑制,精跟踪精度可达到5μrad。两个光通信终端在动态条件下实现可靠精跟踪,并且可靠进入精跟踪视场,可任意时间启动精跟踪。双端可同时启动精跟踪伺服单元,通过精跟踪单元对粗跟踪误差进一步抑制,直到跟踪精度满足通信要求为止。
(5)双向通信:在稳定跟踪的前提下,实现双向动态通信。
3.3 通信链路功率计算
激光通信链路的功率分析是总体方案设计的重要环节。空间激光通信系统的实质也是能量/功率传输系统。
链路的传输方程皆可以用以下的通用表达式描述:

式中:Pr为探测器接收功率;Pt为发射光源的发射功率;Gt为发射光学天线增益;ηot为发射光学单元的效率;Lr为自由空间损耗;ηs为信道引起的功率损失;LAPT为APT对准失配引起的功率损耗;Gr为接收光学天线增益;ηor为接收光学系统效率;ηα为实际束散角与衍射极限角的额外功率损耗。
根据系统通信要求及设计结果,系统链路距离为200km,主光端机光学天线口径为200mm,由两块反射镜组成,反射镜等效面积为口径80mm的反射镜;从光端机口径为150mm,系统通信速率为2.5Gbps,采用半导体外调制技术和EDFA高功率放大(5W),设计时留有3dB以上的裕量。
由此可见,该系统所确定的参数,在100~200Km可实现速率2.5Gbps、BER=10-7的通信,能够满足系统需求。

表1 主光端机发射-从光端机接收功率计算表
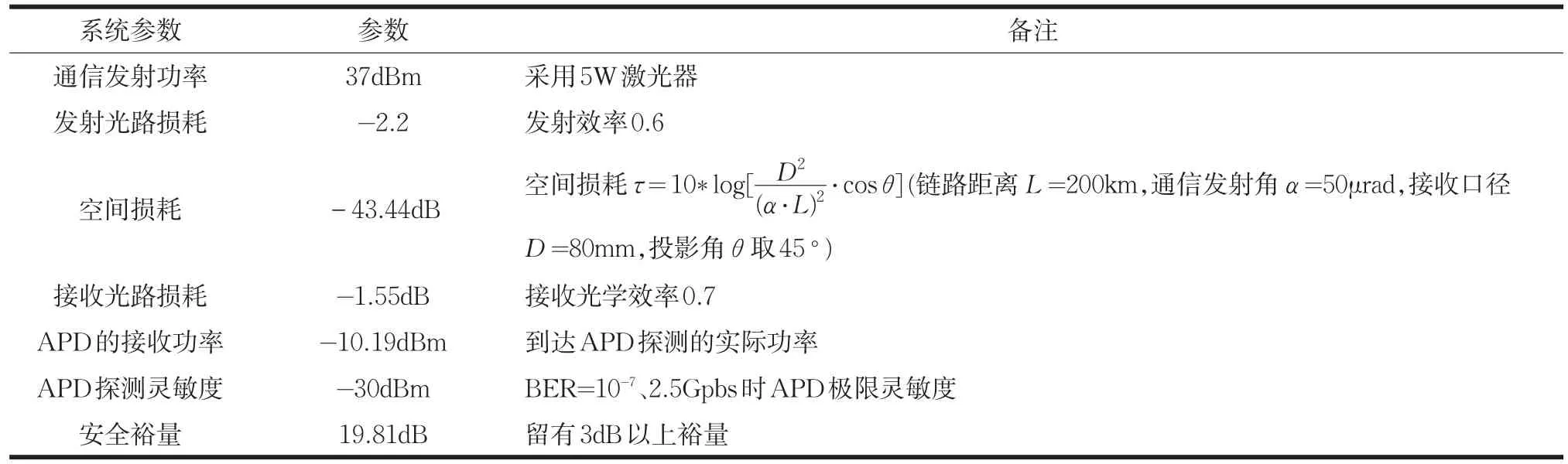
表2 从光端机发射-主光端机接收功率计算表
4 结论
未来编队飞行星座内通信亟需高数据传输能力、抗干扰性强的通信,同时要求在星座内实现通信组网。激光通信具有高速数据传输与强抗干扰能力,但传统的激光通信不能实现多点通信组网。本文在分析某编队飞行星座的轨道特性和通信需求后,基于以旋转抛物面为基础的多反射镜拼接光学天线,提出一种针对该编队飞行星座的“一对二”激光通信组网方案,对系统工作过程进行了分析,并对星间激光通信链路进行了激光功率裕量计算。分析结果表明:该方案可实现编队飞行星座内“一对二”激光通信,通信距离达200km,通信速率2.5Gbps的技术指标。
[1]林来兴.小卫星编队飞行及其应用前景[C].卫星应用研讨论文集(九),2000.
[2]陈晶,艾勇,谭莹.小卫星编队光通信系统设计[J].无线光通信,2007(6):41-43.
[3]李勇军,赵尚弘,张冬梅.空间编队卫星平台激光通信链路组网技术[J].无线光通信,2006(10):47-49.
[4]胡源,付跃刚,姜会林..临近空间激光通信光学系统气动光学仿真分析[J].长春理工大学学报:自然科学版,2013,36(1-2):1-9.
[5]王玲,陈曦,董峰.空间激光通信光端机发展水平与发展趋势[J].长春理工大学学报:自然科学版,2016,39(4):39-45.
[6]吕春雷,佟首峰,姜会林,等.深空激光通信的研究现状及关键技术[J].长春理工大学学报:自然科学版,2012,35(1):1-5.
[7]王硕,张立中,孟立新.火星探测器对地激光通信相对运动研究与仿真[J].长春理工大学学报:自然科学版,2014,37(3):48-51.
[8]尹志忠,陈静毅,周贤伟.美军卫星通信系统的发展及其技术研究[J].通信技术,2009,42(11):55-58.
[9]中国激光网.自由光通信技简介[OL].http://info.laser.hc360.con/2005/09/16095820763.shtmal,2005.
[10]Clarke E S,Prenger R,Ross M.Experimental results with a prototype three-channel multi-access transceiver lasercom terminal[J].SPIE,1993(1866):128-137.
[11]Neil Fox,Will Maynard,Clarke E S.GSFC conceptual design study for an inter-satellite optical multiple access communication system[J].SPIE,1991,1417:452-463.
[12]姜会林,江伦,宋延嵩.一点对多点同时空间激光通信光学跟瞄技术研究[J].中国激光,2015,42(4):04050001-04050008.
[13]姜会林,胡源,宋延嵩.空间激光通信组网光端机技术研究[J].航天遥感与返回,2011,32(5):52-59.
Application of One-point to Multi-point Free Space Laser Communication Technology in Formation Flying Constellation
JIANG Lun1,LI Na2,FU Qiang1,WANG Chao1,LIU Zhuang1,LI Yingchao1,ZHANG Lizhong1,JIANG Huilin1
(1.Fundamental Science on Space-Ground Laser Communication Technolog Laboratory,Changchun University of Science and Technology,Changchun 130022;2.Changchun Shikai Technology Industry Co.LTD,Changchun 130022)
A one point to multi point laser communication network scheme was put forward based on the optical antenna consisted of multi mirrors.And the working processe of the system is analyzed,then the laser communication link between the stars in constellation are analyzed.The analysis results show that the communication rate can reach up to 2.5Gbps,and the communication distance is 200km,which will provide a new technical way for communication network in formation flying constellation.
formation flight;one-point to multi-point laser communication;communication network
TN929.1
A
1672-9870(2016)06-0005-04
2016-09-05
国家自然科学基金(91338116)
江伦(1984-),男,博士,讲师,E-mail:jlciomp@163.com
猜你喜欢
新能源科技(2022年9期)2022-11-20
环境技术(2020年1期)2020-03-06
新生代(2018年20期)2018-11-13
铁道通信信号(2018年3期)2018-04-19
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年1期)2016-11-07
中国新技术新产品(2015年17期)2015-12-23
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
全球定位系统(2015年4期)2015-02-28
中国交通信息化(2014年8期)2014-06-05