基于数字摄影测量的靶场高速摄影测速方法
2016-01-26 06:50刘泽庆张玉荣赵建新杜博军
弹道学报 2015年4期
关键词:图像处理
刘泽庆,张玉荣,赵建新,杜博军
(1.军械工程学院 火炮工程系,石家庄 050003;2.白城兵器试验中心,吉林 白城 137001)
基于数字摄影测量的靶场高速摄影测速方法
刘泽庆1,张玉荣1,赵建新1,杜博军2
(1.军械工程学院 火炮工程系,石家庄 050003;2.白城兵器试验中心,吉林 白城 137001)
摘要:针对靶场静爆试验中破片测速难题,提出了基于摄影测量技术的破片测速方法。以某枪弹为例,开展了测速试验,建立了测试系统,解决了测试现场高速相机布置及参数设定问题;研究了关键技术,通过解析高速相机捕捉的弹丸运动图像序列,还原了弹丸的运动轨迹方程,求解得到弹丸的飞行速度;并将试验结果与铝箔靶测得速度进行对比,相对速度误差小于1%。实例表明,该方法能够准确测量破片的运动速度,测试结果可靠,测量精度能够满足靶场试验要求。
关键词:静爆试验;摄影测量技术;高速摄影;速度测量;图像处理
破片测速是靶场静爆试验中的重要项目。目前,在静爆试验中常采用区截法对破片测速,如接触式靶网法。该方法测试操作简单、测试布站要求较低,但测得数据量小、测量误差大、数据可靠性低,且每次试验都要制作大量的测速靶,试验后进行目标散布统计时经验性很强,误差较大,需要大量的人力和物力。高速摄影测速方法在靶场测速试验中有一定的应用[2-3],但采用的多为胶片相机,测试方法复杂、数据处理效率低。近年来,数字高速相机的发展为高速运动目标的测试提供了重要的技术支持。目前,数字高速摄影在静爆试验中主要用于对静爆过程的记录和定性分析,在运动参数的定量计算方面应用较少。
数字摄影测量采用多个相机对目标的运动影像进行同步采集,通过解析多相机同步拍摄的像,就可以得到目标在三维世界中的位置变化情况,这种数字摄影测量技术在地图测绘、工业过程检测、建筑、考古等中有着广泛的应用。在对高速运动的破片进行测速时,用高速相机代替普通相机,分别布置在2个不同的位置对破片的飞行过程进行拍摄,通过图像处理和坐标解析,还原出破片在三维世界中的位置,实现对破片位置变化的跟踪,并根据高速相机的拍摄帧频计算出破片的速度。
1摄影测量原理
采用相机拍摄得到的二维图片可以认为是对三维空间的一个透视转换,通过2个不同角度拍摄的图像,就可以还原三维空间的分布情况。
如图1所示,设物空间坐标系为OXYZ,点P(X,Y,Z)为空间内一点,S1、S2分别为2个相机,o1x1y1、o2x2y2为相机S1、S2成像的像平面坐标系。
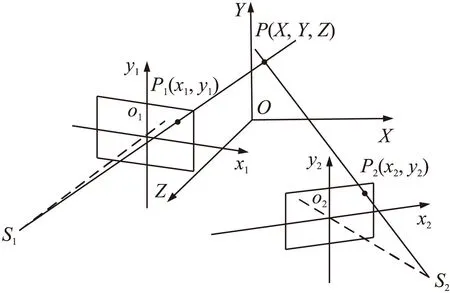
图1 摄影测量原理
现以S1为例进行说明,设P在S1的像平面o1x1y1上的坐标为P1(x1,y1),S1在物空间坐标系中的坐标为(XS1,YS1,ZS1),在不考虑镜头畸变的情况下,P1和P的变换关系为
(1)
式中:f1为相机S1的焦距;a11,a12,…,c13是与相机姿态相关的参数。
同理,P在S2中有:
(2)
在目标的2个像坐标(x1,y1)、(x2,y2)已知的情况下,就可以很方便地求解出X、Y、Z,即点P的坐标。
2系统组成与试验
2.1系统组成
高速相机测试系统主要由高速相机及配件、辅助设备等组成。
2.1.1高速相机及配件
高速相机主要包括相机、镜头和光源,相应的配件有三脚架、云台、高速存储卡、线缆、GPS授时设备等。其中,相机安装在三脚架上,由云台连接,相机在三脚架上可以以一定的俯仰角、方向角放置,位置高低可根据需要调节。在试验中,高速相机采集的数据存储在高速存储卡中,试验结束后可以将数据导出。GPS授时设备分别与2个相机相连,使2个相机时间同步。
2.1.2辅助设备
辅助设备主要有标定杆9根、固定装置、挡板、防弹玻璃。其中,9根标定杆设置在相机的拍摄视场中,对标定杆进行处理,使其与背景相区分且容易辨认。标定杆由固定装置固定在地面上,保证标定杆在拍摄中不晃动。挡板和防弹玻璃布置在高速相机周围,在拍摄弹丸时,只需简单防护,但是在拍摄静爆过程中,破片飞散时要着重布置,其厚度及数量视相机与距爆心的距离、破片威力等而定。
2.2关键技术实现
2.2.1双相机的同步和触发
2个相机分别对飞行的弹丸进行拍摄时,只有实现2个相机精确同步才能保证所拍摄的像对是弹丸在同一位置的影像,才可以准确还原出弹丸物空间坐标。为2台高速相机分别连接GPS授时设备,通过IRIG-B码将2个设备同步为GPS时间。同时,将相机设定B码同步模式。采集完成后,只需将2个图像序列第1张图像的时间对齐,即可保证时间的同步。
双相机的触发可以选择手动触发或声音/振动触发。手动触发需要通过网线将高速相机与控制计算机连接,建立局域网,通过计算机手动控制触发。声音/振动触发通过声音/振动触器自动触发,不需要进行人为干预,但是可靠性略低。
2.2.2高速相机参数的标定
高速相机的参数包括内方位元素和外方位元素,内方位元素与相机属性相关,外参数反应相机拍摄时的位置和姿态。只有知道了高速相机的内外参数,才能够将弹丸在图像上的坐标转换为物空间坐标,因而进行相机参数标定是摄影测量的重要组成部分。
以相机1为例,在进行相机参数标定时,像点坐标和物空间坐标已知,即(x1,y1)、(XS1,YS1,ZS1)为已知量,f1、a1i、b1i、c1i(i=1,2,3)均为未知,共10个参数。由方程(3)可知,每个已知点可以建立2个线性方程,因而为了确定出2个相机的内外参数,需要5个已知点才能完成标定。在试验中,采用设置标定杆的方法,标定杆的位置参数均为已知。
2.3现场布置
相机布置时,尤其是在火炮弹丸速度测量试验中,为了防止炮口火焰强光干扰,2个高速相机布置时采用不正对炮口拍摄,如图2所示。在进行标杆布置时,布置了9根标杆L1,L2,…,L9,如图3所示。
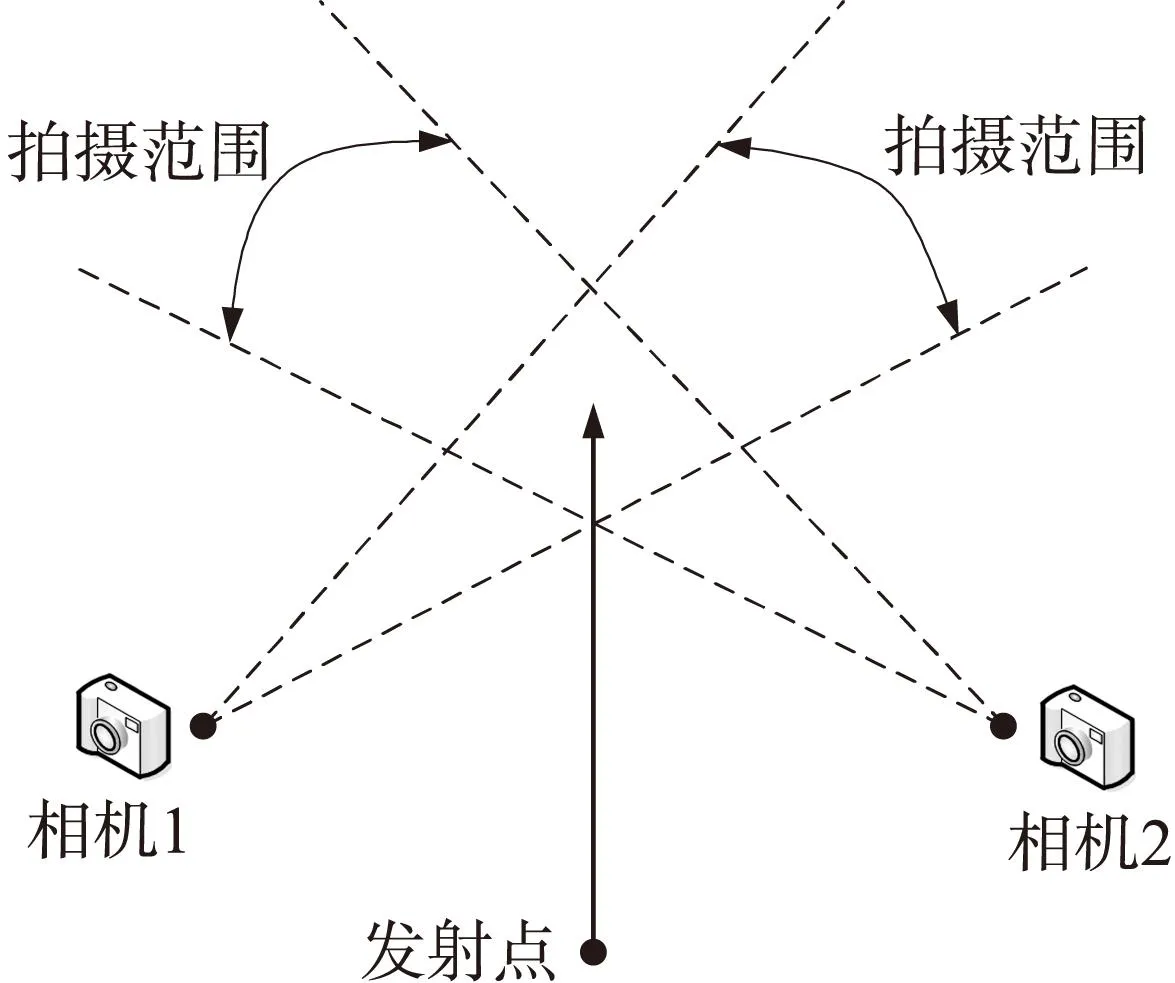
图2 高速相机布置
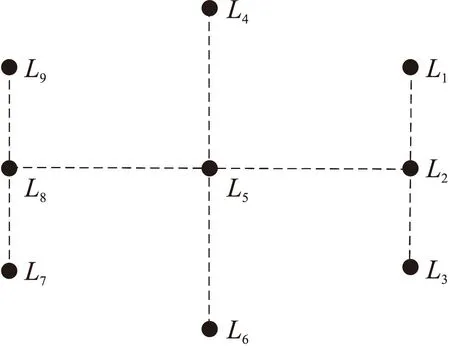
图3 标杆布置
现场布置完成后,需要对2个相机、9根标定杆的实际位置进行精确测量,以便进行相机的内外参数标定。
2.4高速相机调节
2.4.1高速相机曝光时间调节
曝光时间是高速相机进行图像采集的重要参数,对采集到图像的质量有重要影响。曝光时间过长,目标拖影情况较严重,图像质量较差;曝光时间过短,图像亮度过低,使得图像难以辨识。拖影的长度与曝光时间和目标飞行速度成正比,因而在满足亮度需求的情况下,尽量减小曝光时间。
2.4.2高速相机帧频与分辨率调节
帧频的设置决定了在有限视场中采集到有效图像的数目。由于图像存储速度的原因,高速相机的帧频受到图像分辨率的影响。为了在有限的视场中获取更多的目标点,在进行高速相机参数设置时,可选择优先保证图像分辨率,再调节帧频。帧频的设置不宜过大,帧频过大容易导致目标在邻帧图像中相同位置上影像的重叠。
3图像序列解析与速度解算
3.1弹丸运动轨迹提取
为验证该方法的可行性,进行了某枪弹测速试验,选择拍摄帧频为1 000 s-1。以相机S1拍摄到的弹丸飞行图像为例进行分析,拍摄弹丸飞行的图像经放大后如图4所示,从图中可以看出,弹丸目标较小,很难采用边缘提取的方法对弹丸进行提取。但是在拍摄过程中,相机基本保持不动,可以认为背景是恒定不变的,因而可以采用帧间相减的方法进行弹丸的提取。
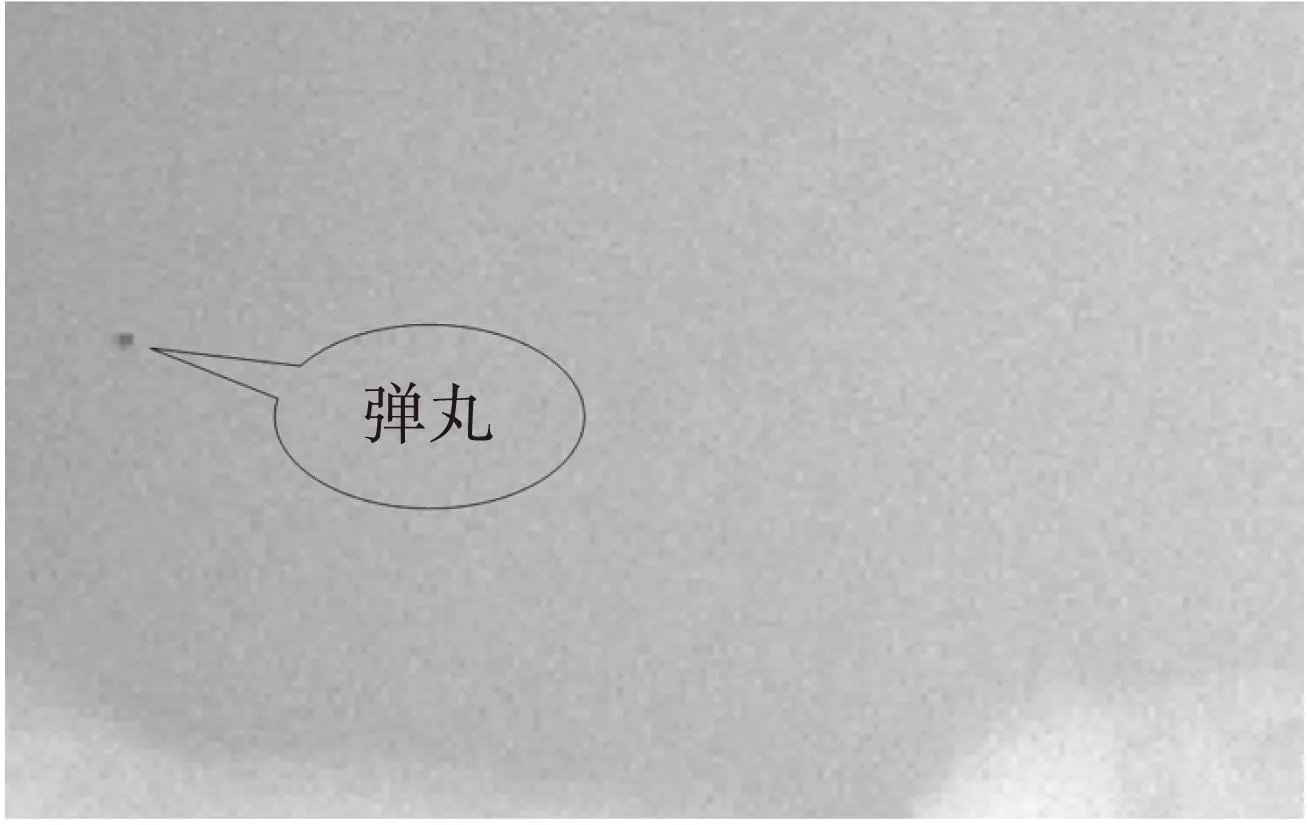
图4 弹丸飞行图像
根据采集到的图像顺序,分别将其记为p1,p2,p3,…,相应图像上任意一点(u,v)点的灰度值记为gp1(u,v),gp2(u,v),gp3(u,v),…,对于相邻的2张图像pn-1和pn,在点(u,v)处,有:
相邻两帧图像相减以后,就可得到消除了背景的弹丸前景图像,为了方便观察,对原图像进行反色处理(为观察方便为图像添加边框,下同),如图5所示。
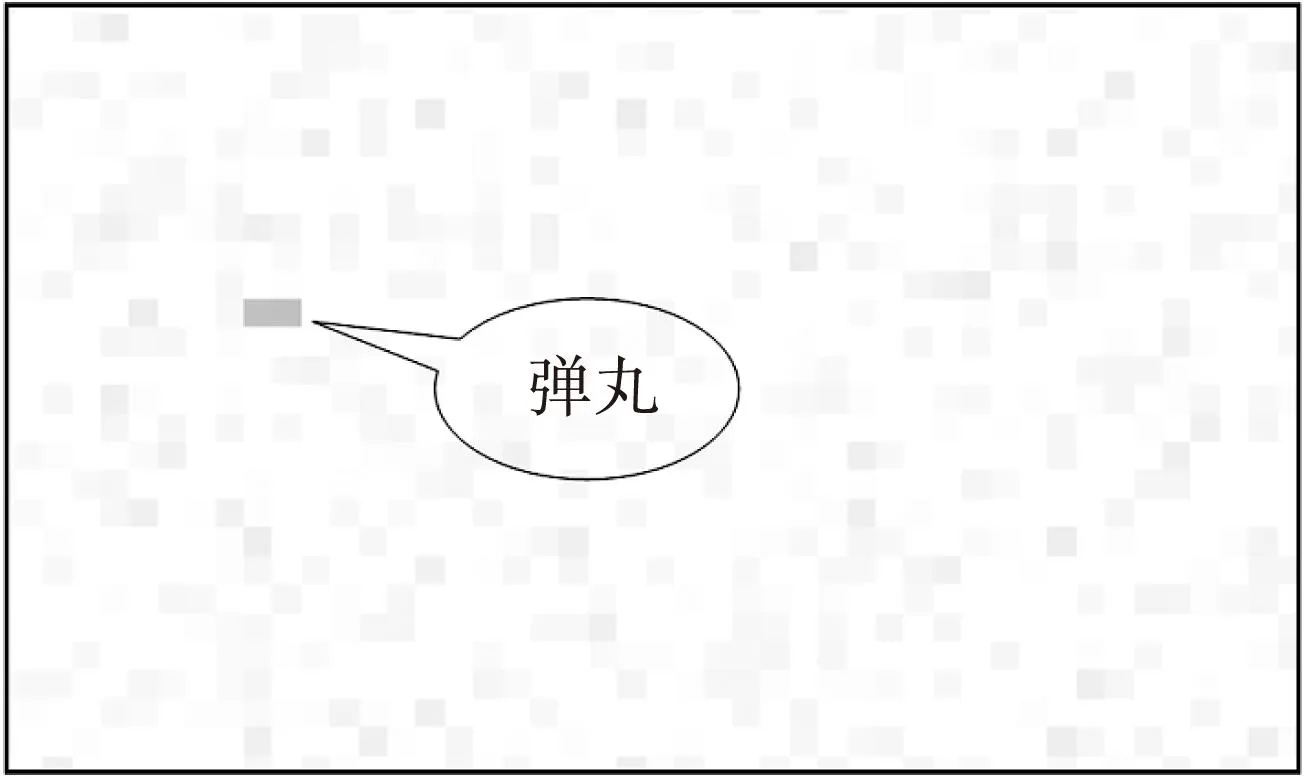
图5 邻帧相减得到的前景图像
3.2阈值分割
采用高速相机对弹丸飞行过程进行拍摄时,由于环境影响和相机曝光不恒定等因素,得到的图像的背景有一定的微小差别,图5中的噪声说明了这一点。但是由于弹丸目标较小,只有几个像素,很难采用中值滤波等方法进行噪声去除。因而,对得到的前景图像的各个灰度值(g)像素点的个数(N)进行统计,得到灰度直方图如图6所示。

图6 前景图像灰度直方图
图6中,由于灰度值0附近点的个数较多,因而像素点个数只截取到20。从图中可以看出,只有少数几个点的灰度值明显大于大多数像素点,通过与目标前景图像进行比较可知,灰度值较大的像素点为目标点。因而,可以通过对直方图的统计获取阈值门限,采用阈值门限对图像阈值分割,将小于阈值的像点像素置0,其它点像素置为1,这样就可以将目标从背景中分割出来,得到目标点所在的位置。处理效果如图7所示。

图7 处理后弹丸前景
3.3图像解析
3.3.1坐标系的建立
建立图像坐标系,以图像中心为原点o1,水平向右为x1轴,竖直向上为y1轴,如图8所示。

图8 图像坐标系
建立物空间坐标系,以标定杆L5顶点为原点O,指向L4方向为X轴,指向天空方向为Y轴,指向L2方向为Z轴,如图9所示。
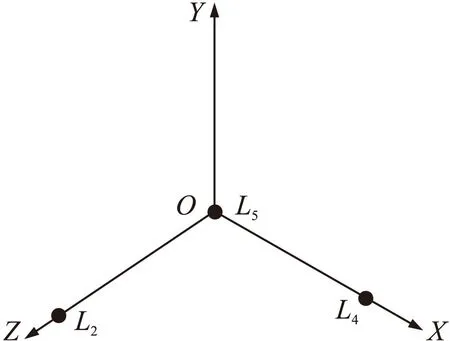
图9 物空间坐标系
3.3.2弹丸轨迹拟合求解
对一个图像序列进行处理,将得到的弹丸前景图像进行叠加,得到弹丸的运动轨迹,如图10所示。
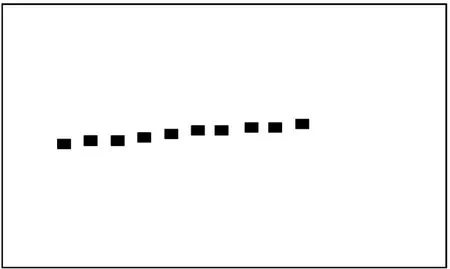
图10 弹丸轨迹
根据图像坐标,计算目标点的坐标,并进行线性拟合,得到弹丸在图像上的运动轨迹,如图11所示。对应的轨迹方程为
y1=0.084x1+2.021
(3)
取第1张图像拍摄时间t=0,根据弹丸在图像上的x1和时间t进行一次插值,可以得到x1-t为
x1=157.113t-12.381
(4)
同理,对相机2同步拍摄的11张图像进行处理,可得:
y2=-0.065x2+2.542
(5)
x2=144.461t+9.859
(6)
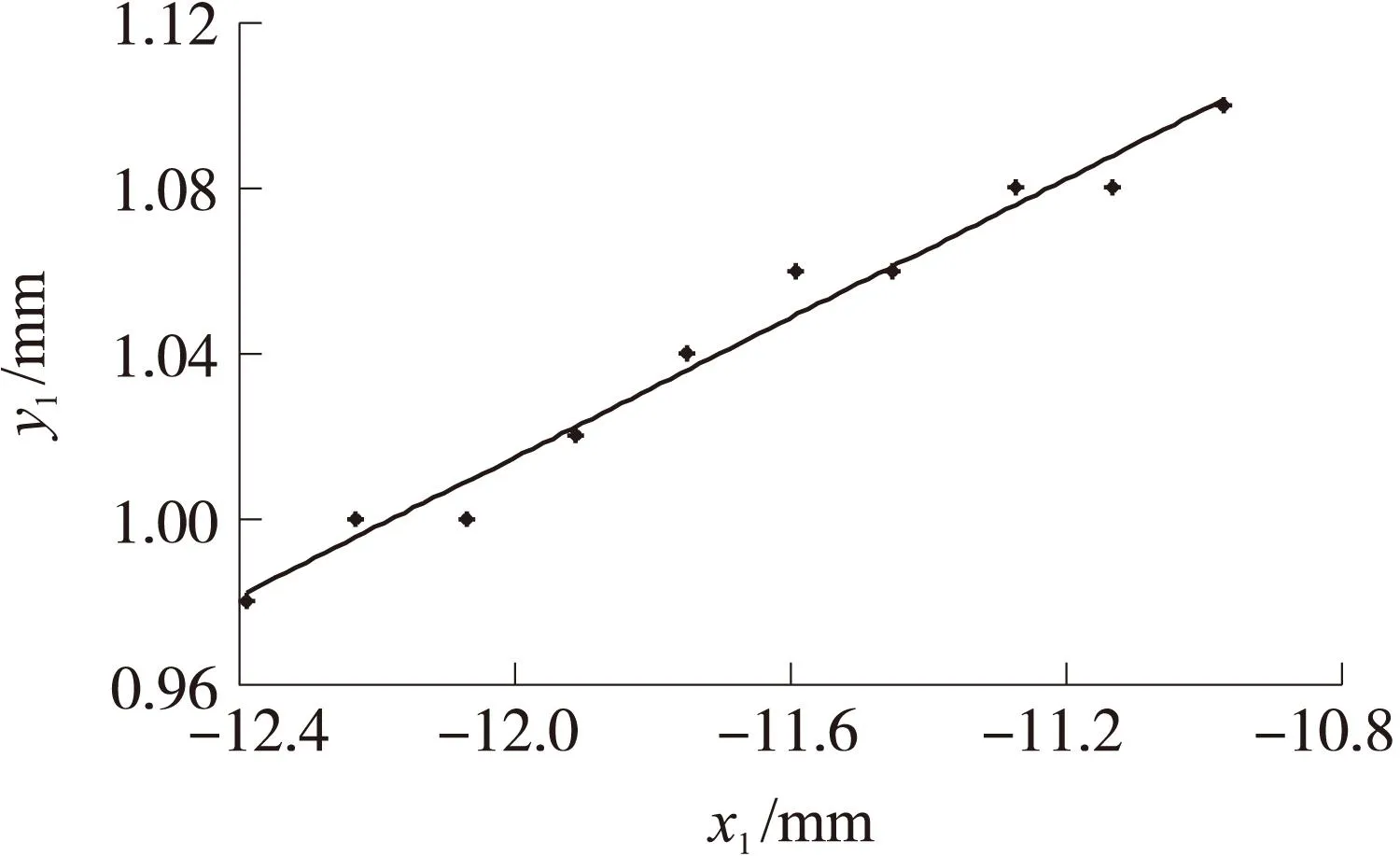
图11 拟合得到的弹丸轨迹
3.4速度解算
在弹丸的飞行轨迹上,任意取2点A、B,设2点的位置坐标分别为(XA,YA,ZA)、(XB,YB,ZB),弹丸经过A、B的时刻分别为tA、tB。那么,
ΔtAB=tA-tB
(7)
(8)
则A、B两点间的平均速度为

(9)

在采用高速摄影测量的同时,设置铝箔靶对弹丸的速度进行测量。经数据处理后,铝箔靶法测得弹丸飞行速度为965.2 m/s。2种方法的测量差为7.1 m/s,误差为0.74%。该方法测试得到的速度同铝箔法测得的速度大小有一定误差,主要来自于弹丸位置提取时采用的帧间相减方法,在邻帧图像差分过程中,弹丸的部分信息被弱化,在进行阈值分割时该部分信息被分割掉,因而得到的位置可能不是弹丸质心所在位置,经过坐标转换这部分误差被进一步放大。
4结束语
本文试验结果表明,数字图像测速技术可以用于靶场试验中弹丸、破片等的测速,结果可靠,误差较小。
如果对目标提取跟踪算法适当进行改进,并加入目标识别、运动位置预测等算法,就能够实现对多目标运动轨迹的提取和跟踪,不仅能够对破片群的速度进行测试,还能够对破片群的空间分布进行分析,这对靶场静爆试验中战斗部毁伤能力的评估有着重要的意义。
参考文献
李丽萍,孔德仁,易春林,等.战斗部破片速度测量方法综述.测控技术,2014,33(11):5-7.
LI Li-ping,KONG De-ren,YI Chun-lin,et al.A review on velocity measurement methods of warhead fragment.Journal of Test and Measurement Technology,2014,33(11):5-7.(in Chinese)
李良威,娄国伟.高速摄像法测量弹丸的破片速度.高速摄影与光子学,1991,20(4):438-442.
LI Liang-wei,LOU Guo-wei.Measurement of projectile fragments’ velocity by high speed photograph.High Speed Photography and Photonics,1991,20(4):438-442.(in Chinese)
刘世平.弹丸速度测量与数据处理.北京:兵器工业出版社,1994.
LIU Shi-ping.Measurement of projectile velocity and data proce-ssing.Beijing:Ordnance Industry Press,1994.(in Chinese)
邓文怡,吕乃光,董明利,等.数字摄影测量技术在三维测量中的应用.光电子·激光,2001,12(7):697-700.
DENG Wen-yi,LV Nai-guang,DONG Ming-li,et al.Application of digital photography technology in 3D measurement.Journal of Optoelectronics Laser,2001,12(7):697-700.(in Chinese)
张剑清,潘励,王树根.摄影测量学.武汉:武汉大学出版社,2003.
ZHANG Jian-qing,PAN Li,WANG Shu-gen.Photographic survey.Wuhan:Wuhan University Press,2003.(in Chinese)
林辉,石波,赵倩,等.多相机同步曝光及GPS时间校正的处理与实现.测绘工程,2013,22(2):79-81.
LIN Hui,SHI Bo,ZHAO Qian,et al.Processing and implementation of multi cameras synchronous exposure and GPS time correction.Journal of Surveying and Mapping Engineering,2013,22(2):79-81.(in Chinese)
刘华宁,郑宇,李文彬,等.基于高速摄影技术的速度测量方法.兵工自动化,2014,33(11):71-74.
LIU Hua-ning,ZHENG Yu,LI Wen-bin,et al.Velocity measurement method of projectiles based on high-speed photography technology.Ordnance Industry Automation,2014,33(11):71-74.(in Chinese)
盛德兵,周志卫,张建.高速摄影运动分析系统测量误差研究.机械与电子,2013,1:57-91.
SHENG De-bing,ZHOU Zhi-wei,ZHANG Jian.Study on measurement error of high speed photography motion analysis system.Machinery & Electronics,2013,1:57-91.(in Chinese)
张小虎.靶场图像运动目标检测与跟踪定位技术研究.长沙:国防科学技术大学,2006.
ZHANG Xiao-hu.Researches on moving target detection and tracking for images of shooting ranges.Changsha:National Defense Science and Technology University,2006.(in Chinese)
High-speed Photography Velocity Measurement in Range
Based on Digital Photogrammetry
LIU Ze-qing1,ZHANG Yu-rong1,ZHAO Jian-xin1,DU Bo-jun2
(1.Department of Artillery Engineering,Ordnance Engineering College,Shijiazhuang 050003,China;
2.Baicheng Ordnance Test Center,Baicheng 137001,China)
Abstract:It is difficult to measure the velocity of fragments in range static explosion test.Aiming at this problem,a novel method based on digital photogrammetry technology was put forward.Take some gun for instance,the speed test was carried out,and the test system was established.The problem of the layout and parameter settings of the high-speed camera was solved in the test field.By analyzing the image sequences of the bullet motion captured by high-speed cameras,the trajectory equation of the bullet was reduced,and the velocity of the projectile was obtained.The test result was compared to the aluminum foil target test result,and the relative velocity error is less than 1%.The instance shows that the fragment velocity can be accurately measured by the method,and the test result is reliable,which can meet the requirement of the range test.
Key words:static explosive experiment;photogrammetry technology;high-speed photography;velocity measurement;image processing
中图分类号:TJ06
文献标识码:A
文章编号:1004-499X(2015)04-0047-05
作者简介:刘泽庆(1991- ),男,硕士研究生,研究方向为弹道学理论与技术。E-mail:liuzeqing320123@sina.com。
收稿日期:2015-09-07
猜你喜欢
农业工程学报(2022年7期)2022-07-09
网络安全与数据管理(2022年2期)2022-05-23
电脑知识与技术(2022年9期)2022-05-10
现代临床医学(2022年2期)2022-04-19
计算技术与自动化(2022年1期)2022-04-15
科技传播(2019年22期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2018年18期)2018-11-14