
基于机器视觉的路基沉降监测方法研究
2016-01-25 06:24肖和华金鼎沸
铁道科学与工程学报 2015年6期
肖和华,金鼎沸
(1.长沙市规划设计院有限责任公司,湖南 长沙 410007;
2.中南大学 交通运输工程学院,湖南 长沙 410075)
基于机器视觉的路基沉降监测方法研究
肖和华1,金鼎沸2
(1.长沙市规划设计院有限责任公司,湖南 长沙 410007;
2.中南大学 交通运输工程学院,湖南 长沙 410075)
摘要:对路基沉降进行实时且有效的监测,对于维护工程质量,保障通车安全具有重要意义。为提高监测效率,降低监测成本,提出一种基于光笔式机器视觉测量系统的非接触式沉降监测方法,将光笔置于监测靶面之上,通过一个CCD单相机对光笔进行实时监测,通过图像处理的方法,计算出光笔垂直向下方向的位移,从而达到沉降监测的目的。试验结果表明:监测断面处的计算沉降值与实际沉降值基本吻合,相对误差达到了1.75%和1.62%。
关键词:沉降监测;机器视觉;光笔;图像处理

路基沉降监测是道路施工以及工后运营维护的一项重要内容。但是,当前的沉降监测方法大多通过地下埋设沉降管,并通过硅微压传感或陶瓷微压传感来监测沉降管中压力差的办法实现沉降测量[1],此方法虽然精度高,但是由于是将沉降管与传感器埋设于路基断面,导致其更换困难,若传感器失效,则会影响监测效率,增大监测成本。针对这种缺陷,有学者考虑使用机器视觉的方法,对路基沉降进行监测,即通过工业相机对沉降点进行连续拍摄,计算出沉降点的垂直向下位移,从而得出沉降值。这种方法避免了频繁更换传感器,提高了监测效率;也避免了更换沉降管时对路基路面的开挖,从而节约了监测成本。刑敬宏等[2]以激光光源代替沉降监测点,通过光斑位移来计算出路基沉降量,但是由于激光投影会造成光斑扩大,从而难以确定光学中心,造成较大的测量误差。宋小齐[3]将激光技术与电子控制技术结合,开发了一套沉降监测系统,虽然预测精度得以提高,但仍无法适用于大范围监测的情况。史磊[4]采用光学传感器捕捉沉降监测特征点位移,但难以解决图像处理中的噪声问题,有时会引起较大的测量误差。对此,本文以光笔代替沉降监测识别点,通过对光笔的垂直向下位移计算来实现路基沉降的监测,既能避免光斑扩散的情况,又能有效规避光学噪点,还能实现较大范围的沉降监测。
1基本理论分析
1.1 视觉测量基本原理

图1 机器视觉模型Fig.1 Model of machine vision
如图1所示,A为一被测点,O为相机坐标系,a为点A在相机成像平面上坐标系上的坐标点。视觉测量的基本模型是通过小孔成像原理得出的。小孔成像原理主要研究空间绝对坐标系中一点A(X,Y,Z)反映到图像坐标系中的过程,而视觉测量是指由图像坐标系中已知坐标的点来反推空间A点的某一坐标,具体过程如下:
设空间一点A的坐标为(X,Y,Z),其在相机坐标系中的像点坐标为(x,y,z)。那么从空间坐标系到相机坐标系有:


(1)
这其中R是3×3三阶旋转矩阵,T是三阶的平移向量(R和T为相机参数,下文求解),这两个矩阵也就决定了由空间绝对坐标系到相机坐标系的坐标变换关系,并且具有唯一性。
通过小孔成像模型易知,若不计误差,则有:
(2)

(3)
f为相机焦距。
而成像平面坐标系和相机坐标系具有如下关系:
u=XNx+u0
(4)
v=YNy+v0
(5)
其中,u0和v0代表像点(点a)中心坐标;Nx与Ny代表单位距离内像素点的数量。那么,图像坐标与空间绝对坐标的关系式可以总结如下:

(6)
其中,Z为物象距离,在本文测量系中是已知的,故以通过以上方程求解X与Y即可得到测量计算目的。
1.2 光笔辅助测量原理
1.1节阐述了机器视觉的基本理论,可以使视觉测量理论上变得可行,但是要实现对被测点的识别,还需要一个光笔(镶嵌高亮度LED灯的光学测棒)作为辅助工具,这个光笔使得相机能够将监测点与监测背景区别开来。本测量系统采用中南大学CAD/CAM研究所自主研发制造的7点式光笔(如图2所示)。

(a)7点式光笔;(b)光笔尺寸结构图2 7点式光笔实物及尺寸Fig.2 Seven point light-pen and its size
如图2(b)所示,A为沉降监测目标点,其余7点为相机识别控制点,根据前人理论,仅当控制点的数目大于等于3个时,A点坐标才是唯一的(三点透视原理参见文献[5])。本文采用7点式对称冗余结构,目的是通过直线BCD、直线ECH、直线FCG分别计算出A点的坐标,继而求其平均,可以减小计算误差。
1.3 相机标定
在机器视觉的模型中存在很多参数,有些参数为相机固有属性,可通过说明书查阅,而对于相机平移和旋转矩阵这些参数,只有通过标定来获得。本文采用正方形黑白棋盘格标定板,通过Zhang标定算法[6]对相机进行标定,每小格尺寸为30 mm×30 mm,如图3所示。

图3 黑白棋盘格标定板Fig.3 Reversing checkerboard calibration board
2路基沉降监测系统组成
本文组建的路基沉降监测系统主要结构模块如图4所示。
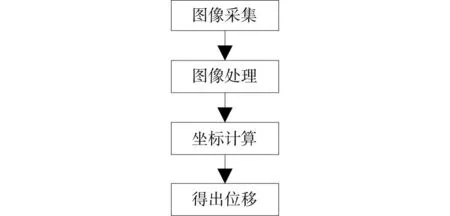
图4 系统结构与流程Fig.4 Structure and process of the system
2.1 图像采集模块
本文采用DALSA Spyder Color CL彩色线阵CCD工业摄像机,摄像机提供了多种颜色输出格式来满足不同的颜色要求,包括RGB,RG/BG或者G。该款摄像机也集成了一些高级特性,比如平场校正、自动平衡,并且可对光源进行预校准,具有2048*4096的高分辨率,能通过无线实时传输数据,可满足施工现场的沉降测量要求。
2.2 图像处理模块
由于采用光笔作为识别点,则无需采用复杂的图像处理技术,仅需对采集到的图像进行二值化处理[7-8](将全彩图转化为黑白图)并提取光源中心点(计算出亮斑中心坐标)即可,大大简化了图像处理过程。本文采用OpenCV6.0进行图像处理[9-10],其中一幅光源点二值化之后效果如图5所示。
2.3 坐标计算模块
经过标定之后,得出测量系统的内外参数,则根据1.1和1.2中的理论则可计算出监测点的横纵坐标。
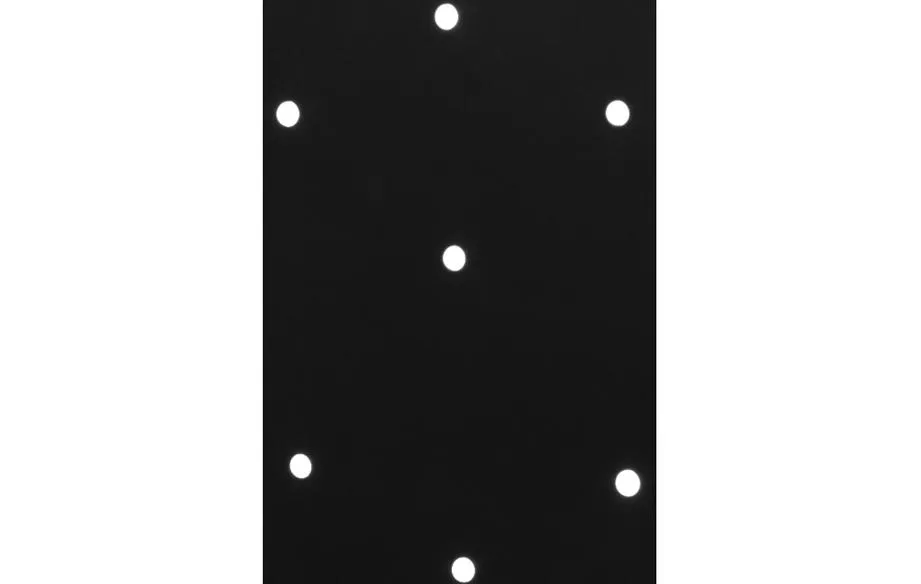
图5 二值化效果图Fig.5 Binarization renderings
2.4 沉降计算模块
通过连续对目标点监测,得出其纵坐标随时间变化的曲线,则可测出该点沉降。
3路基沉降监测实例
3.1 工程实现
湘北某高速公路在施工期间由于处于汛期,地基基础易发生变化,故需要对路基进行实时监测来反映路基沉降状况,以便实时维修管理。
在K280+10~K280+90这80 m范围内均匀设置多个光笔靶点(跨度为6 m以内),在距施工距离15 m以上地区(路基以外区域)设置相机,对距离相机左右各40 m以内(太远则相机无法采集图像)的靶点进行连续90 d的监测(每天对每个监测点自动进行分析),通过监测点的垂直向下位移计算路基沉降。该系统布局如图6所示。

图6 测量系统布局Fig.6 Measurement system layout
3.2 测量结果与分析
以K280+30和K280+70两处监测断面为例,将本系统部分沉降点的沉降监测值与实际沉降值(沉降管法所得沉降值)对比,计算相对误差(式7),如表1所示。

表1 监测效果对比

(7)
式中:δ为相对误差;L为实际路基沉降值;L′为视觉的量系统的监测值。
由表1可见对于两处监测试验,本文光笔式机器视觉测量系统的监测精度与实际沉降较为吻合,相对误差分别为1.75%和1.62%。表明本文方法具有良好的监测精度。
4结论
1)分析了机器视觉的基本理论,建立了完整的路基沉降监测模型。
2)将七点式光笔引入路基沉降测量系统,解决了特征点识别问题,极大方便了图像处理的过程,提高了监测精度。
3)设计了一套光笔式机器视觉非接触式测量系统,实现了较大范围的路基沉降实时监测,可推广应用于其他工程领域。
参考文献:
[1] 邢敬宏,李向伟,赵良涛.一种改进的激光光斑中心检测算法在路基沉降测量中的实现[J].自动化与仪器仪表,2014(6):205-207.
XING Jinghong,LI Xiangwei,ZHAO Liangtao.An improved laser spot detection algorithm in subgrade settlement measurement[J].Automation and Instrumentation, 2014(6): 205-207.
[2] 刑敬宏,张明新,赵良涛,等.基于嵌入式机器视觉的路基沉降监测系统研究[J].自动化与仪器仪表,2014(5):28-30.
XING Jinghong,LI Xiangwei,ZHAO Liangtao.Settlement monitoring system based on embedded machine vision roadbed[J].Automation and Instrumentation, 2014(6): 205-207.
[3] 宋小齐.激光联合电子控制技术的路基沉降监测系统应用研究[J].中国铁路,2014(1):62-65.
SONG Xiaoqi.Monitoring application of laser combined with electronic control systems technology for roadbed settlement[J].China Railway, 2014(1):62-65.
[4] 史磊.基于CCD图像分析的路基沉降测量系统的开发[J].山西电子技术,2013(3):23-25.
SHI Lei.Development based of subgrade settlement CCD image measurement system based on analysis[J].Shanxi Electronic Technology, 2013(3):23-25.
[5] 刘一宇.光笔双目视觉测量系统的研究[D].长沙:中南大学,2010.
LIU Yiyu.Study on light-pen binocular vision measurement system[D].Changsha:Central South University,2010.
[6] Zhang Z.A flexible new technique for camera calibration[J].Microsoft Corporation: Technical Report MSR-TR-98-71,2002.
[7] Adrian K, Grayb.Learning openCV[M].2nd edition.Sebastopol: O’Reilly Media,2008:78-80.
[8] Takashi G, Kozo S.History matching with iterative latin hypercube samplings and parameterization of reservoir heterogeneity[J].Journal of Petroleum Science and Engineering, 2014(114): 61-73.
[9] Heipke C.Overview of image matching techniques[C]// Proceeding of 16th OEEPE workshop on application of digital photogrammetric workstation.Lausanne[s.n.].1996: 173-189.
[10] Richard H, Andrew Z.Multiple view geometry in computer vision[M].2nd edtion.Cambridge: Cambridge University Press,2004: 239-262.
(编辑蒋学东)
A subgrade settlement monitoring method based on machine vision
XIAO Hehua1, JIN Dingfei2
(1.Changsha Planning & Design Institute Co., Ltd.Changsha 410007, China;
2.School of Traffic & Transportation, Central South University, Changsha 410075, China)
Abstract:The real-time and effectively monitor of subgrade settlement is of great significance to the quality of maintenance engineering and the ensurance of traffic safety.In order to improve the monitoring efficiency and reduce the cost of the monitoring, this paper presents a non-contact measurement system,waich is based on a light-pen machine vision measuring system.By putting the light-pen to the top of the monitoring target and using a CCD camera to monitor the light-pen, the vertical displacement of the light-pen, is then calculated,which achieves the purpose of settlement monitoring.The engineering practice shows that the calculated settlement value at monitoring sections are consistent with the actual settlement value,the relative error is 1.75% and 1.62%.
Key words:settlement monitoring; machine vision; light-pen; image processing
通讯作者:肖和华(1971-),男,湖南衡阳人,高级工程师,从事路桥设计研究;E-mail:xhhua1971@163.com
收稿日期:2015-05-03
中图分类号:U416
文献标志码:A
文章编号:1672-7029(2015)06-1365-04
猜你喜欢
网络安全与数据管理(2022年2期)2022-05-23
现代临床医学(2022年2期)2022-04-19
电子制作(2019年15期)2019-08-27
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年18期)2018-11-14
电脑知识与技术(2016年28期)2016-12-21
科技视界(2016年26期)2016-12-17
科教导刊(2016年25期)2016-11-15
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29
