
基于DSP的GNSS实时高频姿态测量技术研究
2016-01-20 08:53:58郝金明王兵浩
全球定位系统 2015年2期
关键词:实时
宋 超,郝金明,王兵浩
(解放军信息工程大学,河南 郑州 450001)
基于DSP的GNSS实时高频姿态测量技术研究
宋超,郝金明,王兵浩
(解放军信息工程大学,河南 郑州 450001)
摘要:本文研究了基于DSP的GNSS实时高频姿态测量技术。针对实时高频应用中遇到的计算时间无法满足高频需求的问题,仔细分析了时间消耗的主要特点。利用姿态测量中单历元固定双差模糊度成功率高的特点,提出一种继承模式的模糊度处理方案。该方案在没有发生周跳或者没有发生卫星升起降落的情况下,不计算模糊度参数,直接使用前一历元的模糊度,避开了模糊度的计算,大幅度的降低了计算时间。实验证明:在同一款DSP下,提出的方法能够有效的解算姿态参数,计算时间削减了33%,计算结果没有精度损失。
关键词:高频;姿态测量;实时;耗时;DSP
doi:10.13442/j.gnss.1008-9268.2015.02.012
中图分类号:P228.4
文献标志码:: A
文章编号:: 1008-9268(2015)02-0053-05
收稿日期:2015-02-10
作者简介
Abstract:The paper studies the real-time high-frequency GNSS attitude determination based on digital signal processing (DSP). In order to solve the demand for real-time computing in high-frequency applications, the features of time consuming are carefully analyzed. According to the high success rate of fixing double difference ambiguity in one epoch for attitude determination, a method based on ambiguity inheritance pattern is proposed. If the ambiguity parameter does not change, the ambiguity parameter will be not calculated. The filter will directly use the ambiguity of the previous epoch, which avoids the calculation of the ambiguity and significantly reduces the computation time. Experiments show that, in the same type of DSP, the proposed method can effectively solve the attitude parameter, the time consuming reduces by 33%, and there is no loss of precision.
0引言
无论是陆上、海上还是空中的用户,运动载体的姿态测量都是非常重要的。一般而言,姿态测量都采用高精度的惯性陀螺系统。惯性陀螺系统具有精度高、采样率高等诸多特点;但是其价格也比较昂贵,对于普通的民用用户而言代价偏高。而GNSS姿态测量系统具有成本低、误差不积累等优点[1-2]。
关于GNSS姿态测量的研究很多。MC-LAMBDA算法[3]基于姿态和模糊度参数的多基线观测模型,并同时解算载体姿态和模糊度参数[4];CLAMBDA算法基于基线长度约束加快模糊度快速搜索[5-7]。将两者进行比较,CLAMBDA算法没有充分利用基线之间先验信息,MC-LAMBDA算法将所有基线同时计算,增加了计算负担[8]。基于向量化姿态矩阵的方法顾及观测量之间相关性和姿态矩阵正交性的向量化[9]。在基线长度较短,比如小于一个波长的情况下,利用接收机的波程差来进行解算,并避免模糊度的求解[10]。利用运动状态模型来提高恶劣条件下的模糊度固定成功率。
对于小型无人机等高动态用户而言,由于运动状态变化较快,传统的1 Hz的数据采样率并不能满足要求,需要实时给出高频的姿态测量结果,比如给出20 Hz或者更高采样率。对于实时高频姿态测量而言,传统的方法并不一定能够满足。以偏低的20 Hz采样为例,其时间间隔为50 ms,三个(或三个以上)接收机数据传输会用掉相当多的时间,留给姿态解算的时间并不多。此外,对于50 ms的时间并不能完全使用,需要留出足够的冗余时间供系统调度使用。对于50 Hz的采样率而言,时间就更加紧张。
对于普通的后处理方式或者低频姿态测量而言,计算时间不是问题。但是对于实时高频姿态测量而言,DSP能否实时处理就非常重要,实时应用需要DSP能够在规定的时间周期内计算完毕。对于基于DSP的实时高频姿态测量,其基本要求是计算时间少,算法可靠简单
首先阐述GNSS姿态测量系统原理,分析GNSS实时高频测量中时间消耗的特点,并从中寻找降低时间消耗的途径。通过综合实验验证本文的设计。
1基本原理
以GPS为例,非差观测方程为[11]
(1)
联系人: 宋 超E-mail:songchao.china@foxmail.com

(2)

对于姿态测量,一般使用双差模型。对于两个接收机组成的基线,由于天线之间的距离较近,对流层延迟和电离层延迟可以忽略。假设接收机i和接收机j同时跟踪卫星k和l,双差模型可以简化为
(3)
(4)
假设有n+1个观测卫星,使用双频数据,对应的误差方程为
V4n×1=A4n×(3+2n)X(3+2n)×1-L4n×1,
(5)

A4n×(3+2n)表示设计矩阵; L4n×1表示双差载波观测量和伪距观测量。根据kalman原理,可获得未知参数的解[12]
(6)



(7)
式中,λ,ψ分别为大地经纬度。
进而可以计算航向角(heading)和俯仰角(pitch)[14]
heading=arctan(Δe/Δn),
(8)
pitch= arctan(Δu/sqrt(Δe×
Δe+Δn×Δn)),
(9)
需要说明的是,式(8)和式(9)需要根据用户的定义调整正负符号。横滚角roll利用另一条与之正交的基线求解,求解公式与公式(9)相同。
2处理策略
本节进行DSP下的耗时分析,从中寻找特点并降低时间消耗量。
2.1 时间耗费分析
利用某型号的DSP进行实验,在整个计算工程中耗时最多的三个模块是单点定位,浮点解求解和模糊度搜索,其他部分如组双差等耗时较少。
单点定位主要是获取初始坐标,浮点解求解和模糊度搜索是获取高精度基线向量的必要步骤,三部分都无法越过。三者之中尤以浮点解求解占用时间最大,即公式(6)。其中耗时最多的是矩阵的求逆,即(ATPA)-1,其维数为(3+2n)×(3+2n)。如果可以降低n的大小,就可以降低矩阵求逆的时间。如果可以不用计算模糊度参数,那么(ATPA)-1的求解时间将降为最低,此外模糊度搜索时间也将省去。因此,下面着重讨论卫星数目与时间的关系和模糊度参数求解的问题。
2.2 卫星数目影响
利用某型号的DSP进行实验获取不同卫星数与时耗的关系。实验证明,时耗与卫星数密切相关。随着卫星数的增加,耗时也在增加,而且增长的速度在变大。
实验同时证明,随着卫星数目的增加,基线向量精度在提高。但是卫星数增加到一定程度后,基线向量精度就会稳定下来,不会再提高,比如8颗卫星和9颗卫星的基线向量精度大致相同。
综上,随着卫星数目的增加,基线向量精度在提高,同时耗时也在增加。对于用户来讲,需要在两者之间寻找一个平衡。在满足精度的前提下,尽量选用较少的卫星数目。
2.3 模糊度处理
模糊度参数的处理在整个姿态解算中最为重要,同时也是最为耗时的部分。一般来讲,模糊度参数需要进行估计并固定成整数,其模式主要为连续模式,即每个历元估计模糊度参数时利用之前模糊度的先验信息。如果遇到周跳或者卫星发生升起降落,需要重新估计对应的模糊度参数。连续模式是最为经典的处理模糊度的方式,充分利用了多个历元的观测信息。
对于姿态测量来讲,由于基线属于超短基线,利用1个历元数据进行模糊度固定的成功率非常高,即仅仅利用当前历元的观测数据,这种模式称之为单历元模式。单历元模式的优点是不用处理周跳,相当于每个历元都是第一个历元。
无论是连续模式还是单历元模式,都需要解算模糊度,因而都需要耗费大量的时间。为了降低耗时,提出了继承模式。

(10)
进而误差式(5)为
V4n×1=A4n×3X3×1-L4n×1.
(11)
比较式(5)和式(11)可以看出,相应的法矩阵
N=ATPA.
(12)
其阶数大大降低。在式(5)中阶数为(3+2n)×(3+2n),而在方程(11)中为3×3.以n=8为例,相当于将19×19的矩阵求逆变成了3×3的矩阵求逆,计算量大大下降,耗时也大大下降。对于继承模式,模糊度不需要解算,占用大量时间的模糊度搜索模块也可以省去,因而可以进一步降低耗时。
2.4 综合处理策略
综合上面的分析,为降低耗时,采取控制卫星数和灵活处理模糊度参数的综合处理策略。根据精度需求,事先确定使用的卫星个数M(比如选择6~8个),然后选择高度角较高的M个卫星。当卫星发生周跳或者升起降落的时候采取单历元模式,否则采取继承模式。
具体步骤如下:
1) 将观测卫星按高度角从小到大排序。
2) 按照高度角从大到小的顺序选择M个卫星。
3) 判断是否发生周跳,或者M个卫星序列的卫星号发生变化。如果是转4),如果否转5);
4) 对模糊度采取单历元模式;
5) 对模糊度采取继承模式;
综合数据处理策略的流程图如图1所示。
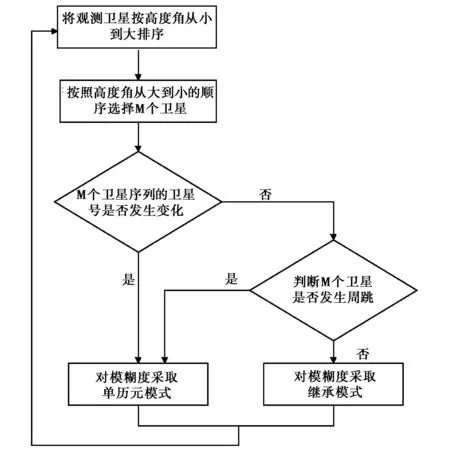
图1 综合数据处理策略的流程图
3综合实验分析
实验于2013年7月25日在某GNSS实验场进行,数据采用率为20 Hz.模糊度参数搜索采取LAMBDA算法,模糊度验证采用ratio法。ratio>2时认为模糊度成功固定。下面进行单历元模式和继承模式的耗时对比和精度对比。
3.1 耗费时间对比
两种模式的耗费时间对比如图2所示,整体上讲两种模式耗费时间都随着卫星数目增加而增加,但是继承模式明显要比单历元模式耗费时间少,这对于实时高频的姿态解算来讲是非常重要的。卫星数目越多,削减百分比越大。平均削减百分比为33%,这意味着用户可以从20 Hz的采样率提高到30 Hz.
总之,提出的继承模式明显降低了时间消耗,非常有益于实时高频的姿态解算。

图2 两种模式的耗费时间对比
3.2 精度对比
由于算法设计中采用单基线解算,即两条基线分开解算。从精度评价角度来讲,两条基线是等价的。下面的实验分析中以一条基线为例,基线长度约为8 m,评估姿态角时评估航向角和俯仰角(横滚角)。
下面比较继承模式和单历元模式的精度情况。将基线向量转换成姿态角,两种模式的计算误差如图3、图4所示,RMS对比如图5所示。航向角的RMS约为0.015°,俯仰角(横滚角)的RMS约为0.035°.
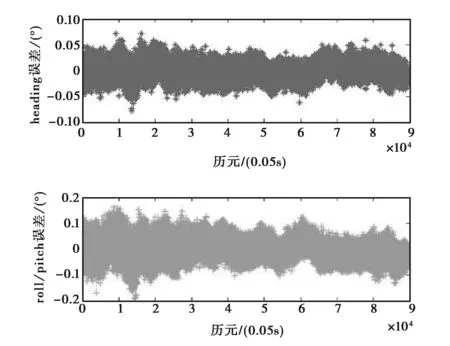
图3 单历元模式的姿态角误差
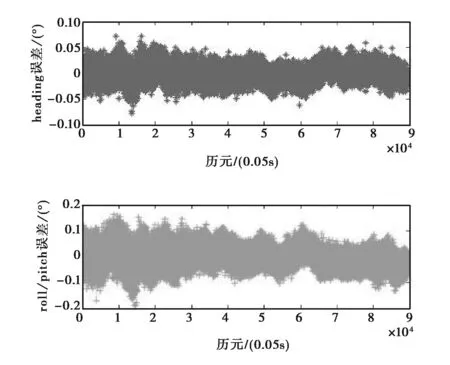
图4 继承模式的姿态角误差
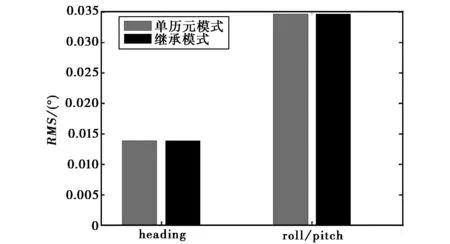
图5 两种模式的姿态角RMS对比
从上面的比较可以看出继承模式计算的误差与单历元模式是相当的,也就是说继承模式没有损失精度,与单历元模式精度相当。
4结束语
本文研究了基于DSP的GNSS实时高频姿态测量技术。对于普通的后处理方式或者低频姿态测量而言,计算时间不是问题,但是对于实时高频姿态测量而言,DSP的实时处理就非常重要,需要能够在时间周期内计算完毕。本文针对实时高频应用中遇到的计算时间无法满足高频需求的问题,仔细分析了时间消耗的主要特点。利用姿态测量中单历元数据固定双差模糊度成功率高的特点,提出一种继承模式的模糊度处理方案。该方案在没有发生周跳或者没有发生卫星升起降落的情况下,不计算模糊度参数,直接使用前一历元的模糊度,大幅度的降低了计算时间。实验表明:提出的方法能够有效的解算姿态参数,计算时间削减了33%,计算结果没有精度损失。
参考文献
[1] 郑坤, 董绪荣, 刘亚涛,等. GNSS载波相位多天线实时测姿系统的设计与实现[J]. 测绘科学技术学报, 2014(2):136-139.
[2] DA Costa J P C L, SCHWARZ S, DE A GADELHA L F,etal. Attitude determination for unmanned aerial vehicles via an antenna array[C]//Smart Antennas (WSA), 2012 International ITG Workshop on. IEEE, 2012: 264-268.
[3] TEUNISSEN P J G, GIORGI G, BUIST P J. Testing of a new single-frequency GNSS carrier phase attitude determination method: land, ship and aircraft experiments[J]. GPS solutions, 2011, 15(1): 15-28.
[4] TEUNISSEN P J G. A general multivariate formulation of the multi-antenna GNSS attitude determination problem[J]. Artificial Satellites, 2007, 42(2): 97-111.
[5] GIORGI G, TEUNISSEN P J G, BUIST P J. A search and shrink approach for the baseline constrained LAMBDA method: experimental results[C]//Proceedings International GPS/GNSS Symposium, Tokyo, Japan. 2008.
[6] TEUNISSEN P J G, GIORGI G, BUIST P J. Testing of a new single-frequency GNSS carrier phase attitude determination method: land, ship and aircraft experiments[J]. GPS solutions, 2011, 15(1): 15-28.
[7] WANG B, MIAO L, WANG S,etal. A constrained LAMBDA method for GPS attitude determination[J]. GPS solutions, 2009, 13(2): 97-107.
[8] 王冰, 隋立芬, 张清华,等. 利用 GPS 解算载体测姿的算法研究[J]. 武汉大学学报·信息科学版, 2013, 38(12): 1392-1395.
[9] 王冰, 隋立芬, 吴江飞,等. 一种利用GPS进行姿态估计的新算法[J]. 测绘科学技术学报, 2013 (1): 46-50.
[10]王磊, 翟国君, 赵俊生,等. 一种利用 GPS进行船只姿态测量的新方法[J]. 武汉大学学报信息科学版, 2006, 31(12): 1071-1074.
[11]GENG J. Rapid integer ambiguity resolution in GPS precise point positioning[D]. University of Nottingham, 2010.
[12]隋立芬,宋力杰,柴洪洲.误差理论与测量平差基础[M].测绘出版社,2010.
[13]TEUNISSEN P J G. The least-squares ambiguity decorrelation adjustment: a method for fast GPS integer ambiguity estimation[J]. Journal of Geodesy, 1995, 70(1-2): 65-82.
[14]TEUNISSEN P J G. Integer least-squares theory for the GNSS compass[J]. Journal of Geodesy, 2010, 84(7):433-447.
宋超(1986-),男,汉,河南新乡人,博士生,主要研究方向为实时精密定位与姿态测量。
郝金明(1962-),男,山东曹县人,教授,博导,主要研究方向为网络RTK技术和GNSS姿态测量技术。
王兵浩(1989-),男, 河北衡水人,硕士生,主要研究方向为中长距离相对定位和GNSS姿态测量技术。
Real-TimeHigh-FrequencyGNSSAttitudeDeterminationBasedonDSP
SONGChao,HAOJinming,WANGBinghao
(Information Engineering University, Zhengzhou 450001, China)
Keywords:High-frequency;attitudedetermination;real-time;timeconsuming;DSP
猜你喜欢
科学与财富(2016年28期)2016-10-14 00:29:27
人民周刊(2016年15期)2016-09-28 09:18:50
中国科技博览(2016年17期)2016-08-26 20:35:25
课程教育研究·学法教法研究(2016年8期)2016-06-14 18:31:36
电脑知识与技术(2016年4期)2016-04-11 14:20:41
科技视界(2016年7期)2016-04-01 11:30:10
电脑知识与技术(2015年36期)2016-03-04 11:48:07
物联网技术(2015年12期)2015-12-28 13:27:28
科技视界(2015年27期)2015-10-08 13:28:59
物联网技术(2015年7期)2015-07-21 09:37:13
