
自适应前照灯弯道照明模式数学模型的研究
2016-01-19 01:40:28,
机械与电子 2015年10期
关键词:数学模型
,
(哈尔滨工业大学机电工程学院,哈尔滨 150001)
Research on the Mathematical Model of Bending Mode of Adaptive Front-lighting System
WANG Weijie,LIU Qiulin
(School of Mechatronics Engineering, Harbin Institute of Technology, Harbin 150001,China)
自适应前照灯弯道照明模式数学模型的研究
王伟杰,刘秋林
(哈尔滨工业大学机电工程学院,哈尔滨 150001)
Research on the Mathematical Model of Bending Mode of Adaptive Front-lighting System
WANG Weijie,LIU Qiulin
(School of Mechatronics Engineering, Harbin Institute of Technology, Harbin 150001,China)
摘要:根据国内外相关法规、标准以及中国的道路交通情况,对自适应前照灯的弯道照明模式进行了系统研究,建立相应的数学模型。通过对停车视距和汽车转弯半径的几何分析,推导出了水平调整角度和转弯半径及车速间的函数关系。根据道路圆曲线最小半径一般值得到前照灯最大调整角度,分析了左右前照灯的配合调整方式,并通过仿真验证了整个数学模型的可行性。
关键词:自适应前照灯;弯道照明模式;数学模型
中图分类号:U463.65
文献标识码:A
文章编号:1001-2257(2015)10-0007-05
收稿日期:2015-05-11
Abstract:According to domestic and international regulations, standards and road conditions in China, the mathematical model of the bending mode was built. A functional relationship among the headlight adjusting angle, turning circle and speed was established through the geometrical analysis of stopping sight distance and turning radius. Based on the general value of minimum radius of circular curve, the maximum adjusting angle of the headlight and the cooperation of the left and right headlights were determined. The feasibility of this mathematical model was validated by simulations.
作者简介:王伟杰,男,辽宁岫岩人,副教授,研究方向为机电一体化;刘秋林(1992-),男,江西全南人,硕士生,研究方向为机电一体化。

Key words:adaptive headlights;bending mode;mathematical model
0引言
传统前照灯是固定的,其照射角度和照射范围不能够随着车速和道路状况进行调节,传统前照灯已经不能满足安全驾驶的照明要求。自适应前照灯系统AFS(adaptive front lighting system)是一种主动安全系统,该系统能够根据道路条件、环境情况和汽车自身行驶状态,调整前照灯光束的照射方向,最大限度地满足汽车驾驶员对夜间行车照明的要求,能够有效地避免夜间行车时因照明不足引发的交通事故,从而提高汽车的主动安全性能。AFS系统由多种照明模式组成,其中弯道照明模式,就是指在车辆夜间弯道行驶过程中,AFS系统的照明方向随着汽车行驶速度和行驶道路弯道几何形状变化以改善车辆在弯道的照明效果的动态工作模式。
弯道照明模式工作原理是,汽车在夜间行车转弯时,AFS主控制模块根据采集到的汽车行驶速度和汽车横摆角速度信息计算出前照灯所需的水平调整角度,然后通过控制算法计算出旋转步进电机的运行频率、方向和脉冲数,输出到旋转步进电机控制器,驱动旋转步进电机转动,来加强弯道内侧的照明,增强夜间行车的照明效果。
1前照灯水平角度调整模型
根据AFS系统弯道照明模式工作的基本原理,当车辆在夜间弯道行驶时,AFS系统的光束与车辆重心轨迹相割。
停车视距是指驾驶员发现前方有障碍物,使汽车在障碍物前安全地停住所需要的最短距离。根据调查研究结果,在紧急情况时,驾驶员倾向于采用制动操作,而停车视距大于制动距离。因此,选择停车视距作为AFS弯道几何照明距离更加安全。
由表1可以看出,随着车速的增加,停车视距增加且车速越高,停车视距增加幅度越大。对表中的数据采用最常用的最小二乘法进行曲线拟合,即通过最小化误差平方和寻找数据的最佳函数匹配。在Matlab环境下,利用polyfit函数得到各阶次拟合曲线方程。停车视距与车速关系拟合曲线如图1所示。
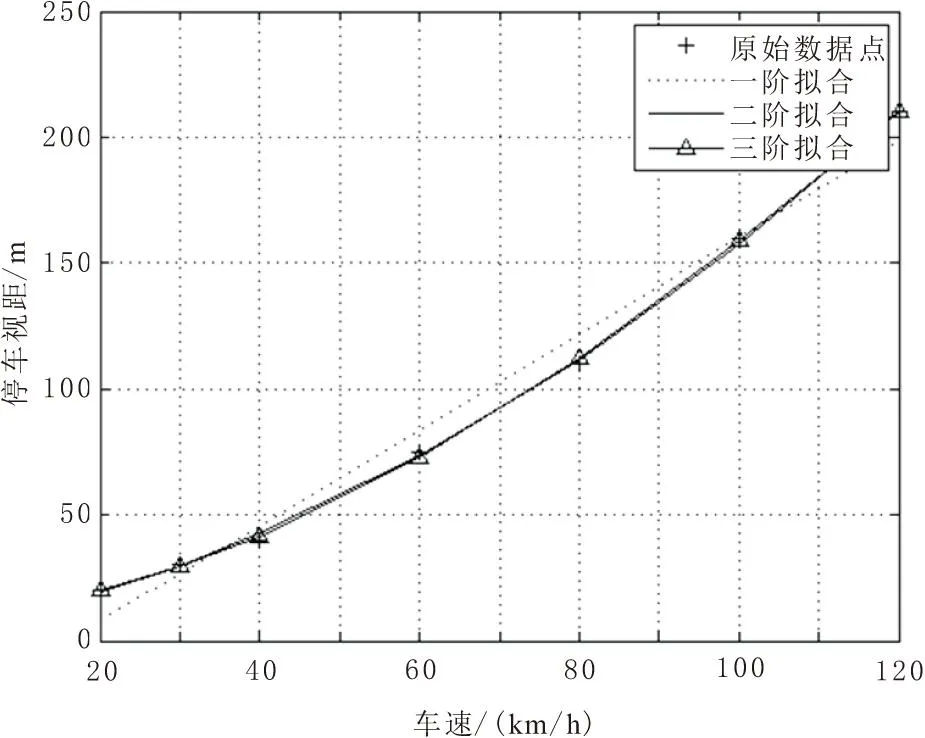
图1 停车视距与车速关系拟合曲线
表1车速与停车视距对应关系

设计速度/(km/h)1201008060403020停车视距/m21016011075403020
二阶拟合曲线和三阶拟合曲线基本重合,所以,为了简化模型方便运算,采用二阶拟合,因此车辆停车视距为:
S=0.0094v2+0.6057v+3.1730
(1)
S为停车视距;v为车速。
车辆在弯道行驶时,以停车视距作为前照灯有效照明距离的判定标准,前照灯水平调整φ角后,照明范围需覆盖停车视距S。前照灯水平调整角度、停车视距和转弯半径之间的几何关系如图2所示。

图2 弯道几何照明距离与转弯半径几何关系
由图2中弯道几何照明距离与汽车转弯半径几何关系为:
(2)
整理可得前照灯水平转角φ,转弯半径R和车速v之间的计算为:

(3)
φ为前照灯水平调整角度;R为转弯半径;v为车速。
为了直观地观察车速、转弯半径和前照灯水平调整角度的关系,分别做出不同车速,不同转弯半径所对应的前照灯水平调整角度,如图 3所示。

图3 不同车速下前照灯水平调整角度与
由图3可以看出,AFS系统水平调整角度变化范围很大,但是,前照灯水平调整角度过大,虽然增加了弯道内侧照明,但是会使弯道外侧照明变差从而可能导致整体照明效果变差,而导致车辆安全性降低。因此,前照灯水平调整角度在一定转弯半径下存在最大值,在保证弯道外侧照明效果的同时,最大限度地增强弯道内侧的照明。
2前照灯水平角度调整限值
GB4785-2007关于水平方向角度调整的规定:“为了形成弯道照明,可以改变一只或两只近光灯的水平方向,但是当移动整个光束或明暗截止弯曲肘部时,明暗截止线弯曲肘部不得与离车辆前面的距离为相应近光灯安装高度100倍的车辆重心轨迹相交,且车辆重心轨迹曲率半径应不大于500 m”。即有最大水平调整角度为:
(4)
φmax为国家标准规定的前照灯最大水平调整角度;H为前照灯基准中心高度,和前文一样,取为75 cm,代入式(4)整理可得:
(5)
根据表2中的数据分别使用一阶、二阶和三阶最小二乘拟合对设计速度和圆曲线最小半径“一般值”进行拟合,如图4所示。
表2圆曲线最小半径“一般值”与车速对应关系

设计速度/(km/h)1201008060403020圆曲线最小半径“一般值”/m10007004002001006530

图4圆曲线最小半径“一般值”与设计速度
关系拟合曲线
由图4中曲线可以看出,二阶和三阶的最小二乘拟合能够比较好的拟合设计速度和圆曲线最小半径“一般值”的关系,为了减少运算量,选取二阶最小二乘拟合,可得式(6)。并且从图中可以看出圆曲线最小半径“一般值”500 m对应的设计速度介于80 km/h和90 km/h之间。所以,根据国家标准,水平方向调整时车辆的重心轨迹曲率半径应不大于500 m,还有正常行驶时,车辆在弯道行驶的车速不超过80 km/h,前照灯水平调整模型对于车速在80 km/h以内进行设计。
Rmin=0.087 8v2-2.554 2v+53.045 5
(6)
考虑圆曲线最小半径“一般值”,不同车速下前照灯水平调整角度与转弯半径关系如图5所示。

图5 考虑圆曲线最小半径“一般值”的情况时,不同
从图5中可以看出前照灯水平调整角度在圆曲线最小半径“一般值”的情况下大多小于15°,所以,将前照灯水平调整角度的限值φmax规定为15°,曲线可以调整如图6所示。

图6 调整后的不同车速下前照灯水平调整角度与转弯半径关系
并且,前照灯水平调整角度的计算公式可以修正为:

(7)
3左右前照灯配合调整方式
前照灯水平调整角度的建模分析是将左右前照灯看成一个整体,建模分析整体光轴的水平调整角度。实际情况下,整体光轴由左右前照灯光线合成,汽车左右前照灯的整体水平调整角度模式有3种,单侧水平角度调整、双侧等角度水平调整和双侧非等角度水平调整。其中,单侧水平调整和双侧非等角水平调整会存在左右两侧前照灯光型分岔使得照明区域中央可视性降低的安全隐患。因此,左右前照灯的分岔的角度不能过大,即水平调整角度差需要控制在一定范围。
汽车左右前照灯投射出的光型属于不对称型,依据我国车辆右行交通原则,前照灯近光的光型为左低右高型。目前前照灯水平角度调整的范围通常也不对称,弯道行驶时,处于弯道内侧的前照灯水平角度调整范围为0°~15°,弯道外侧的前照灯水平角度调整范围为0°~8°。所以,如果规定以汽车前进方向为参照,前照灯向左调整角度为负,向右调整角度为正,则左前照灯角度调整范围为-15°~8°,右前照灯的角度调整范围为-8°~15°。
从国家标准GB 21259-2007《汽车用气体放电光源前照灯》以及欧洲经济委员会制定的关于AFS系统的法规ECE R123中对于配光点的要求50 V处,即车辆正前方50 m处的照明点光照度不小于5 lx。通过Lucid Shape光学仿真软件进行仿真实验,测量不同左右前照灯水平调整角度差时,汽车前方50 m处路面的光照度曲线,发现当左右两侧前照灯水平调整角度差为8°时,满足照明区域中央照度值不低于5 lx的要求。根据左右前照灯水平调整角度差值,绘制出AFS系统在3种可能的水平角度调整模式下,弯道内外侧前照灯调整角度的关系。汽车左右两侧前照灯分别以双侧等角度水平调整和单侧水平角度调整,弯道内外侧前照灯调整角度的关系如图7所示。
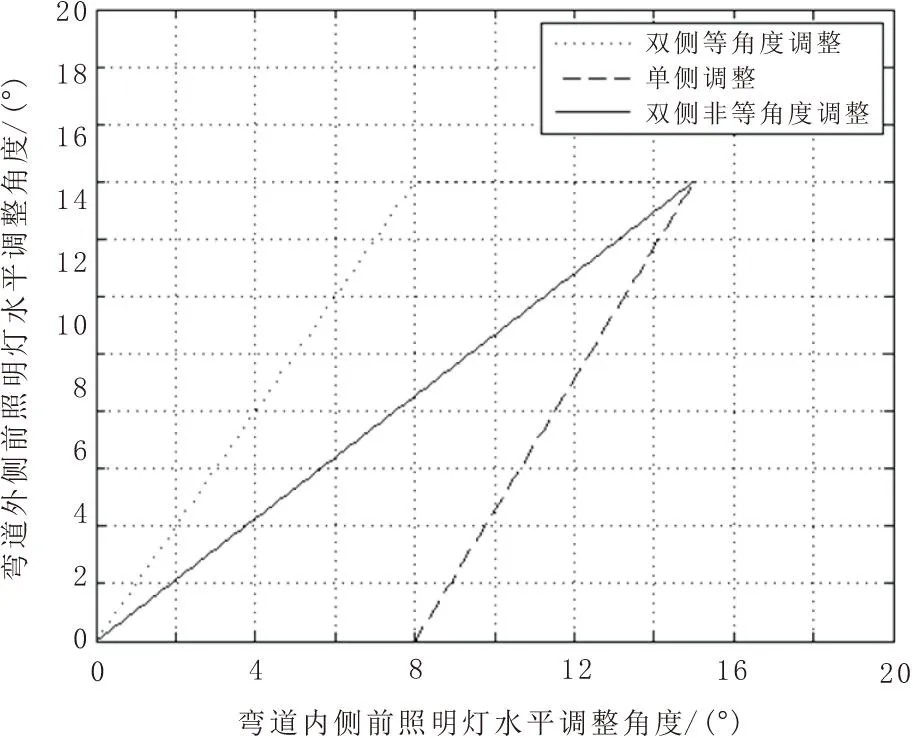
图7 不同配合方式下左右前照灯调整角度关系曲线
以双侧等角度的方式进行水平角度调整时,内侧前照灯最大调整角度为15°,外侧前照灯的最大调整角度为8°,两灯在0°~8°的角度范围内等角度调整。所以在两灯的水平调整角度差的范围内,只有弯道内侧前照灯进行水平角度调整,调整角度为0°~8°,而外侧前照灯静止不动,调整角度始终为零。两条曲线围成的区域内,均为汽车AFS系统左右两侧前照灯以双侧非等角度的方式进行水平调整,左右前照灯水平调整角度的关系。
经过对3种水平角度调整方式的比较,得出,双侧非等角度水平调整方式的照明效果会更优,不仅能够达到加强弯道内侧照明的效果,还能够在汽车前方区域照明和弯道外侧照明上取得一个平衡的效果。以双侧非等角度的方式进行水平调整时,汽车左侧和右侧前照灯的水平调整角度关系有着比较大的不确定性。因此,必须要确定一种合适的左右前照灯水平调整角度的关系。根据弯道内外侧前照灯水平调整角度的范围,确定采用实线作为左右前照灯水平调整角度的配合方式,有式(8),且如图7所示。
(8)
采用如图7所示的双侧非等角度方式进行水平调整,在前照灯需要的调整角度较小时,通常在高速和大转弯半径的弯道出现,此时侧重于汽车前方区域照明。所以,较小的调整角度差能使左右两侧前照灯的照射方向尽量平行,可以减少由于前侧前照灯分岔导致照明区域中央可视性降低的安全问题;而当前照灯需要调整角度较大时,通常在低速和小转弯半径的弯道出现,此时侧重于弯道内侧照明。所以,较大的调整角度差能满足驾驶员对弯道内侧照明的需求。这里采用双侧非等角度水平调整的工作方式,更有利于汽车AFS系统在夜间弯道行驶时发挥其提高驾乘安全性的作用。
4模型验证
AFS水平调整角度最大限值的情况进行验证,取左右两侧前照灯的安装距离为1.2 m,通过LucidShape光学仿真软件按照双侧非等角度调整配合方式对最大水平调整角度值进行仿真。观察前照灯照明效果如图8所示。
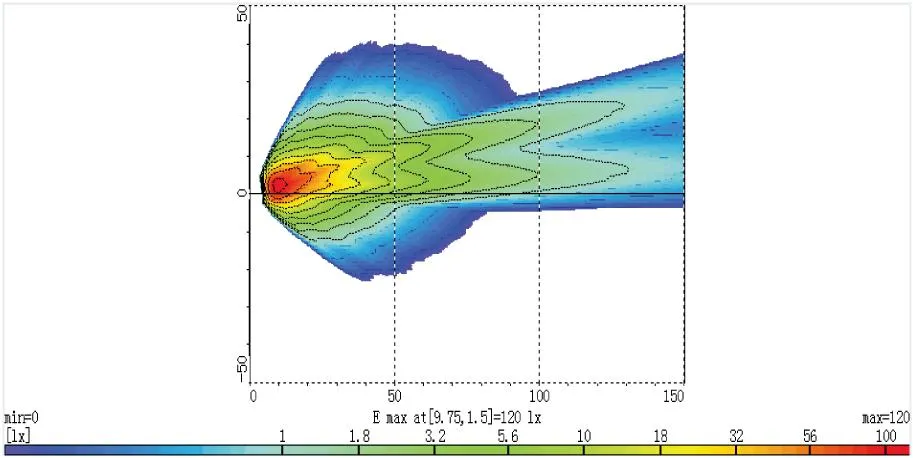
图8 最大水平调整角度照明效果
任意选取其他10个不同的工况,根据上述的公式计算作于前照灯水平调整角度,结果都能有效地提高弯道照明效果,验证了所建立的数学模型的正确性。
通过上述AFS系统弯道照明模式的建模和仿真,验证了所建立的弯道照明模式数学模型的正确性,进一步在实验室搭建一个简单的自适应前照灯样机实验平台进行实物验证。
主控制部分采用飞思卡尔的MC9XS128微控制芯片,车速信号采用电位器进行模拟,横摆角速度使用ENC-03陀螺仪测量,车灯水平调整角度通过车灯上的位置传感器测得,经测试,水平调整角度范围为-15°~8°,达到设计的要求。
5结束语
以汽车停车视距为依据,结合中国的道路设计情况,建立了自适应前照灯系统中弯道照明模式的数学模型,推导得出了前照灯水平调整角度与车速和转弯半径的函数关系,并且进一步确定了前照灯水平调整角度的范围和左右前照灯的配合调整方式,最后仿真验证了数学模型的合理性。
参考文献:
ECE R123,Uniform provisions concerning the approval of adaptive front-lighting systems(AFS) for motor vehicles.
ECE R48,Uniform provisions concerning the approval of vehicles with regard to the installation of lighting and light-signalling devices.
JTG B01-2003,国家公路工程技术标准.
陈雪梅,魏中华,高利. 紧急情况下驾驶员行为研究. 北京工业大学学报, 2007, 33(5):449-454.
GB 4785-2007,汽车及挂车外部照明和光信号装置的安装规定.
GB 21259-2007,汽车用气体放电光源前照灯.
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23 13:46:54
新高考·高二数学(2022年3期)2022-04-29 05:08:09
电子制作(2019年23期)2019-02-23 13:21:34
测控技术(2018年8期)2018-11-25 07:41:56
中学数学杂志(初中版)(2016年5期)2016-11-01 11:22:43
电测与仪表(2015年2期)2015-04-09 11:29:00
石油工程建设(2014年5期)2014-03-20 15:24:45
河南科技(2014年15期)2014-02-27 14:12:51
河南科技(2014年5期)2014-02-27 14:08:47
电源技术(2014年9期)2014-02-27 09:03:25
