
基于D-S理论和模糊神经网络的疲劳驾驶监测
2016-01-19 01:43:56王仲民李佳玉邓三鹏
自动化与仪表 2016年3期
王仲民,李佳玉,邓三鹏
(天津职业技术师范大学 机械工程学院,天津 300222)
疲劳驾驶监测主要是通过对各疲劳特征参数值进行综合分析来判断驾驶员是否疲劳驾驶,为驾驶员疲劳驾驶预警提供决策依据[1]。国内外关于监测疲劳驾驶的方法主要包括检测驾驶员操作行为、检测车辆状态、检测驾驶者生理反应等。然而,疲劳监测方法现仍处于探索阶段,还未形成统一的疲劳监测系统模型及制定出疲劳监测标准。由于疲劳是一种复杂的生理现象,生理信息能较准确地反映出疲劳状态[2],本文通过实验采集驾驶员的生理特征信息,融合分析心率、脉搏和呼吸信号,决策识别出驾驶员所处的驾驶状态。
D-S证据理论在决策级的信息融合中具有较好的识别作用[3],是由Dempster和Shafer提出的一种识别、融合不确定信息的推理方法。然而,D-S理论中基本可信度的分配需要综合有关领域专家的知识和经验,在实际应用中很难实现。本文首先通过运用与训练模糊神经网络,将相关专家的经验判断和采集的模糊信息一并融入疲劳决策过程,然后利用模糊神经网络的学习速度快、识别精度高等优点,将其输出的结果归一化后设置为基本可信度。最后采用D-S理论与模糊神经网络相融合来决策判定驾驶员驾驶状态。决策判定过程如图1所示。
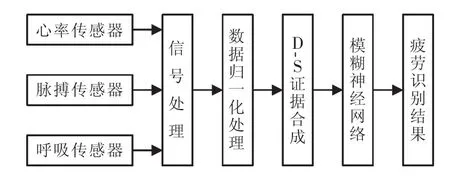
图1 疲劳识别流程Fig.1 Process of fatigue recognition
1 疲劳驾驶特征参数的提取
疲劳状态下驾驶属非法驾驶且较危险,开展实际道路环境下疲劳驾驶实验具有很大的危险性。研究表明,模拟驾驶与实车驾驶之间存在良好的一致性[4],因此可采用模拟驾驶实验进行相关研究。
室内模拟驾驶实验中使用Pulse Sensor光电反射式脉搏传感器、Polar RS800CX运动心率表、HXB-2型压电式呼吸传感器来采集驾驶员的呼吸、脉搏和心率信号。在每天相同时间段内进行实验,整个实验过程时间为3 h,持续一周。安装心率、脉搏、呼吸仪器设备后,实验员先驾驶5 min熟悉操作环境,根据研究,单调路况下,驾驶员将在30 min后出现疲劳特征,即使在实验前没有睡眠或疲劳现象[5],所以选择120 min作为实验时间,其他时间作为参考。实验中实时动态监测并记录模拟驾驶者的各种数据。
2 D-S理论与模糊神经网络融合
2.1 D-S证据理论基本思想
以Ω作为有限个变量A全部取值的集合,且集合中所有元素均互不相容,集合Ω是变量A的识别框架。由Ω的全部子集构成的一个集合记作Ω的幂集,表示为 2Ω。
设识别框架Ω内任意变量A、函数m、Bel均是从集合 2Ω到[0,1]的映射。
疲劳识别中,把驾驶员可能出现的状态作为假设,各种可能状态的集合为辨识框架,疲劳引起的各个生理特征信息为证据,则驾驶员各种状态之下各个生理特征的概率分布为该状态的基本可信度分配。
设E1、E2…En为同一识别框架Ω中的n个独立证据,m1、m2…mn是相应的基本概率分配函数,相应焦元是 Ai(i=1,2,…,n),若存在,则D-S合成规则为

2.2 模糊神经网络的可信度分配
疲劳识别过程中,基本可信度可看作是驾驶员各生理特征信息从属于其驾驶状态的隶属度,因此采用模糊神经网络,利用学习建立的模糊推理规则,模糊推理输入的驾驶员生理特征参数,推出驾驶员生理特征参数隶属于各驾驶状态的程度,从而得到D-S理论的基本可信度。
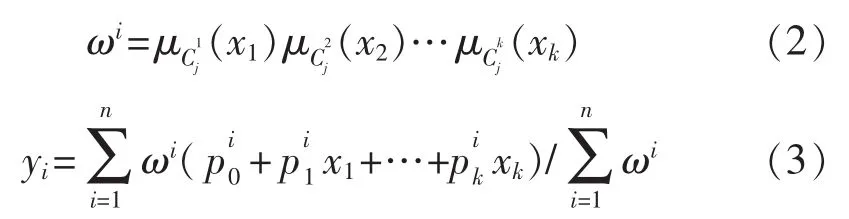
模糊神经网络包括输入层、模糊化层、模糊规则计算层和输出层,结构如图2所示。输入层为输入变量xi;模糊化层是用曲线较为平滑的高斯型隶属度函数模糊化输入值,以求出模糊隶属度值μ;模糊规则计算层以模糊连乘式(2)求出模糊算子ω;输出层以式(3)求出计算结果y。

图2 模糊神经网络结构Fig.2 Structure of FNN
2.3 模糊神经网络疲劳决策
驾驶员状态分为清醒和疲劳2类,因此需构造2个子模糊神经网络,每个子模糊神经网络的输入对应着生理特征,即人体呼吸、脉搏和心率信号特征参数,输出分别对应一种状态。选用提取的清醒和疲劳状态下的心率、脉搏、呼吸样本数据各80个,归一化处理后如表1所示,其中60个(分为3组)进行训练,剩余20个进行测试。
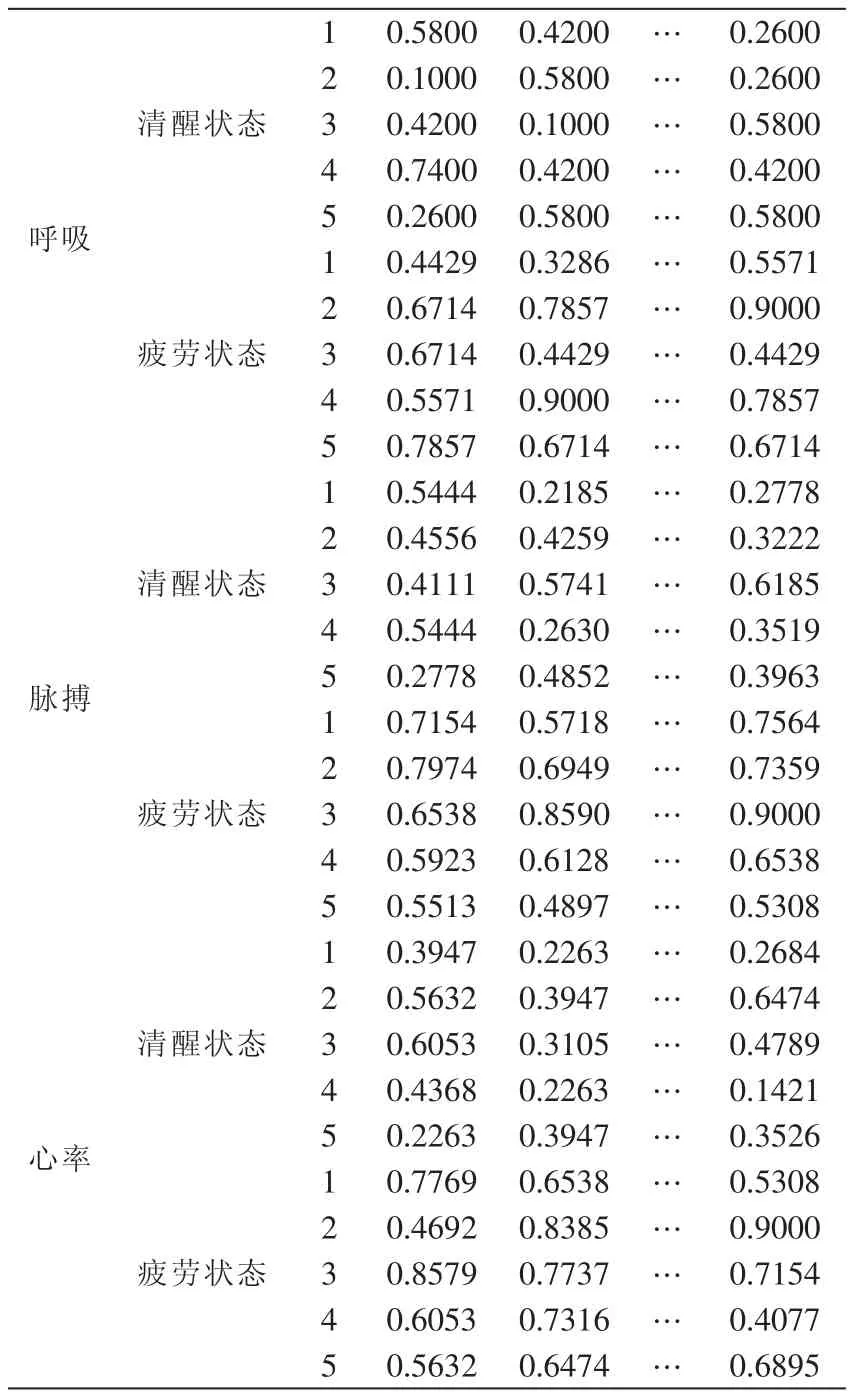
表1 归一化后生理特征参数Tab.1 Physiological characteristic parameters after normalization
将每种信号的3组数据作为输入特征变量,输入节点数为20,输出节点数为2,以减法聚类算法聚类分析样本,并训练2个子模糊神经网络,得到误差变化曲线如图3所示,337次达到最佳训练误差值0.00099226。
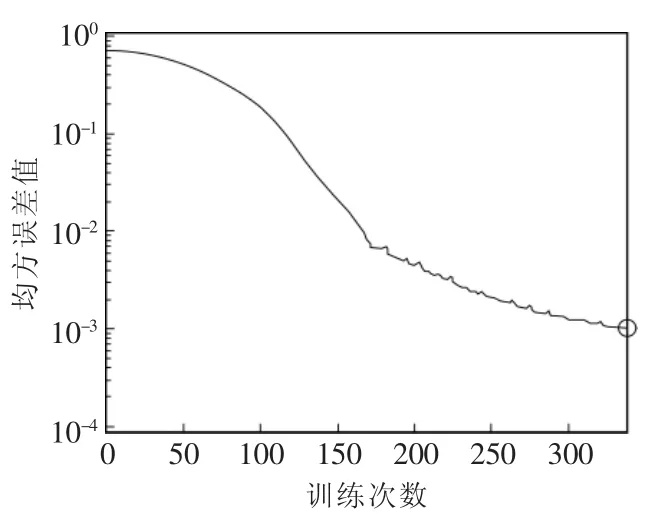
图3 模糊神经网络训练误差曲线Fig.3 Curve of FNN training error
又设计一个3层BP网络进行疲劳驾驶识别,输入层节点数取20,根据网络训练效果调整隐含层节点数,先设置为9,输出层神经元个数为2,以自适应学习率与附加动量项结合的方法训练BP网络。用训练后的样本和测试样本分别训练与测试网络,误差变化曲线如图4所示,3000次达到最佳训练误差值0.033991。
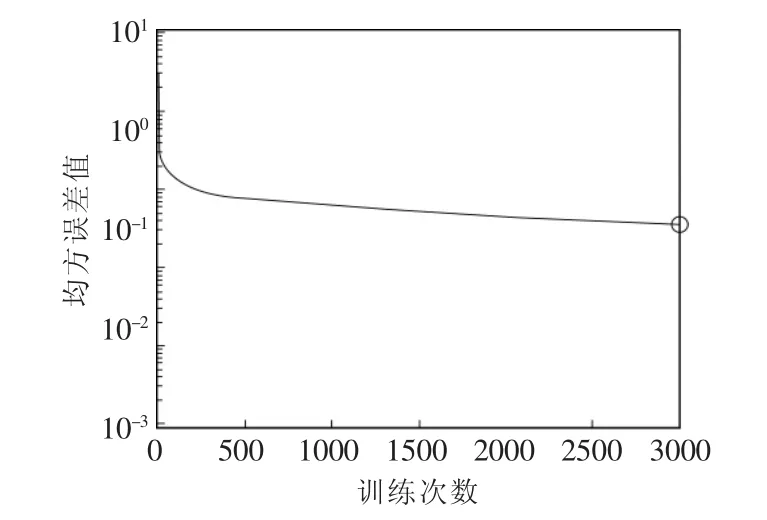
图4 BP神经网络训练误差曲线Fig.4 Curve of BP network training error
从图3与图4可知,模糊神经网络训练速度与性能优于BP网络,误差也较小,基本无震荡现象,因此模糊神经网络的疲劳决策精度优于BP网络。
2.4 D-S理论疲劳决策
对于每个焦元的基本可信度的获取问题,利用模糊神经网络进行解决。用实测数据在训练好的神经网络中进行测试,以经过归一化处理的模糊神经网络测试输出作为每个焦元的基本可信度分配,输出误差e作为不确定度θ,输出归一化计算公式为
式中:i=1,2为驾驶员的2种状态,1代表清醒,2代表疲劳;ei为网络误差;yi为模糊神经网络的输出;mi为3种生理信号状态下的基本可信度分配。D-S融合结果如表2所示。
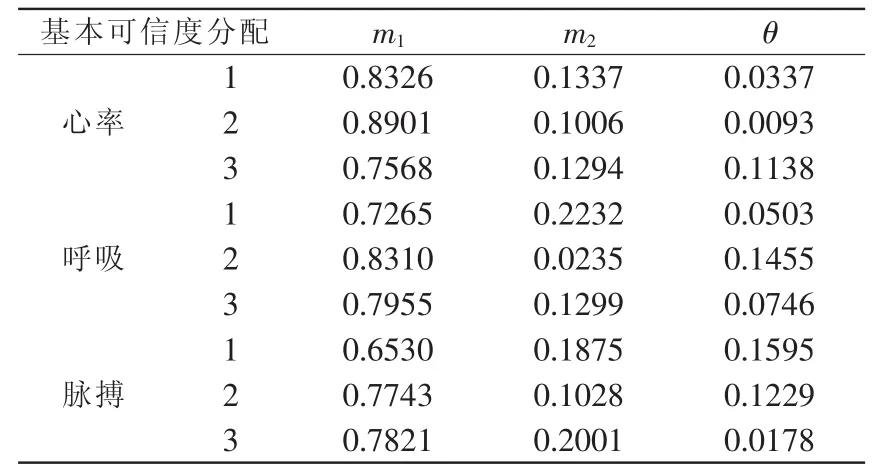
表2 模糊神经网络输出归一化结果Tab.2 Normalized output of fuzzy neural network
由于m1,m2相互独立,将表2中的数据按式(1)进行融合,结果如表3所示。与表2对比可知,决策精度有了很大提高。
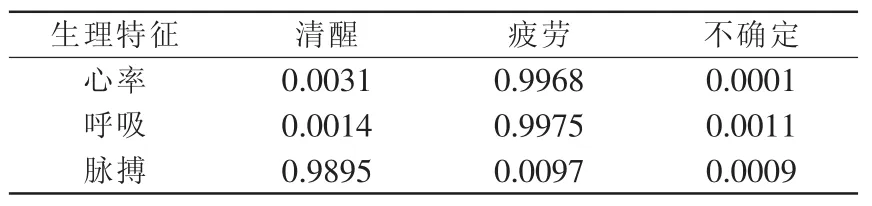
表3 证据融合结果Tab.3 Results of evidence fusion
对表3中数据进行融合,可得到清醒状态下m=0,疲劳状态下m=1,不确定度为 0,所以此时驾驶员处于疲劳状态。由于对模糊神经网络进行测试的数据就是驾驶员处于疲劳状态时的数据,融和结果与实际相符。与表3对比,可知单个传感器对疲劳状态的识别精度没有多传感器的精度高,且多个信息融合的结果优于单一信号判定结果。
3 结语
根据模糊神经网络兼有模糊理论与神经网络的特性,构建了模糊神经网络结构,提出了疲劳驾驶监测方法,并与BP网络进行对比,证明该方法具有较高的识别精度,在疲劳决策过程中有较好的应用。同时,验证了D-S证据理论在实现疲劳驾驶监测中的可行性和有效性,为驾驶员疲劳驾驶预警研究提供一种决策依据,这对降低因疲劳驾驶引发的事故具有重要的参考价值。
[1]孙伟,张小瑞,唐慧强,等.基于自适应遗传粒子群优化模糊神经网络的疲劳驾驶预测模型[J].汽车工程,2013,35(3):219-223.
[2]Shen K Q,Li X P,Shao S Y,et al.EEG-based mental fatigue measurement using multiclasssupport vector machines with confidence estimate[J].Clinical Neurophysiology,2008,119(7):1524-1533.
[3]屈肖蕾,成波,林庆峰,等.基于驾驶员转向操作特性的疲劳驾驶检测[J].汽车工程,2013,35(9):803-807.
[4]Godley S T,Triggs T J,Fildes B N.Driving simulator validation for speed research[J].Accident Analysis and Prevention,2002(34):589-600.
[5]Gillberg M,Kecklund G,Akerstedt T.Sleepiness and performance of professional drivers in a truck simulator comparisons between day and night driving[J].Journal of Sleep Research,1996,5(1):12-15.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:13:42
汽车实用技术(2022年4期)2022-03-07 06:07:20
中国特种设备安全(2021年5期)2021-11-06 05:09:00
装备制造技术(2021年4期)2021-08-05 07:39:54
世界科学(2020年1期)2020-02-11 07:39:34
中国生物医学工程学报(2019年5期)2019-07-16 07:56:56
制造技术与机床(2017年11期)2017-12-18 06:46:39
Coco薇(2017年5期)2017-06-05 13:03:24
公民与法治(2016年4期)2016-05-17 04:09:26
现代电生理学杂志(2015年4期)2015-07-18 11:00:44
