
多关节灵巧手混合遥操作控制系统
2016-01-19 01:43宋小瑛肖金凤傅舰艇
自动化与仪表 2016年3期
宋小瑛 ,肖金凤 ,傅舰艇 ,李 耀
(1.南华大学 电气工程学院,衡阳 421001;2.中国科学院重庆绿色智能技术研究院,重庆 400714)
多关节灵巧手主从遥操作控制的控制策略是决定灵巧手抓持精度的关键因素。要实现高精度遥操作控制,需解决2个关键问题:一是主操作端运动检测,如何获得精确人手运动信息 (关节角度等),这是灵巧手主从遥操作控制的核心问题[1];二是高精度映射方法的选取。对问题一,数据手套因具有佩戴方便、安全、灵活性强、受环境干扰小、识别率高、实时性强等优势,成为人手运动信息检测的最佳和最常用设备[2]。对问题二,大量学者开展了相关研究,提出了关节空间映射方法、指尖位置映射方法、基于特征点集的灵巧手主从映射、基于虚拟手指的直角空间指尖运动映射方法等[3-5]。但研究表明,现有的主从遥操作控制方式,控制精度并不理想[6-9]。
本文采用Cyber Glove II无线数据手套和压敏电阻器作为主操作端信息检测的硬件平台,以自主设计的多关节灵巧手为研究对象进行主从遥操作控制系统研究,实验发现:1)灵巧手和物体间的作用力小于或等于0.28 N时,采用数据手套控制,精度较高;2)当灵巧手和物体间的作用力大于0.28 N时,仍采用数据手套控制,精度很低,而利用压力控制灵巧手的角度运动,精度提高。
本设计提出一种基于关节角度映射和指尖压力控制相结合的混合控制方式,成功实现多关节灵巧手遥操作控制,实验表明该混合控制方法具有控制精度高、响应快等优点。
1 系统设计
1.1 系统整体结构
系统整体结构如图1所示,包括运动信息获取模块、控制系统模块及执行端灵巧手3个部分。

图1 系统结构Fig.1 System assumption diagram
本设计采用的主操作端信息检测的硬件平台具有18个抗弯曲传感器,每个传感器测量为8位模数转化,采样率为90 Hz。其中,手指配备2个曲度传感器,此外还有4个外展传感器以及测量拇指交叉截面、手掌拱度、腕关节弯曲和外展的传感器。控制对象为项目组自主设计的机器人灵巧手。该手指设计为双自由度,第一自由度关节采用蜗轮蜗杆机构驱动;第二自由度关节采用蜗轮蜗杆机构结合钢丝绳传动。
系统通过无线数据手套采集操作端关节角度信息,运用FSR400采集压力信息;采用串口通信方式将处理后的控制信号发送至灵巧手电机驱动模块,产生相应的 PWM(pulse-width modulation)控制信号,驱动各关节处的直流无刷电机,实现人手对灵巧手的主从遥操作控制。
1.2 压力检测与控制
本设计中压力检测采用具有瞬态电压抑制功能的压敏电阻器FSR400。当压力感测电阻器感应面的压力增加时,其阻抗就会减少,从而取得压力数据。
压力检测与控制模块主要包括压力检测电路、模数转换及数据处理3个部分。压力检测与控制电路如图2所示。

图2 压力检测与控制电路Fig.2 Pressure detection and control circuit
图中,直流电桥电路将压敏电阻器R4的电阻变化率ΔR4/R4转换成电压输出。其中R1=R2=R3=R5=R6=10 k,R4为压敏电阻器FSR400,用于获取压力数据。通过精密运算放大器OP27将电桥输出的电压信号放大,16位AD转换器AD7606将输入的模拟量转换成与之对应的数字量,数据处理模块采用32位微控制器STM32F103。人手指尖与灵巧手指尖都安装压敏电阻器,利用主从控制端的电压差ΔU控制灵巧手的运动,直到ΔU=0时电机停止转动。
2 控制策略
2.1 混合控制
本系统中,人手部佩戴数据手套和压力传感器,食指在垂直平面内做弯曲运动,实现灵巧手的遥操作控制。当食指指尖与物体接触产生的作用力小于或等于0.28 N时,系统遥操作主要由基于数据手套的关节角度控制来完成;当食指指尖与物体接触产生的作用力大于0.28 N时,系统遥操作主要由基于压敏电阻器FSR400的压力跟随控制来完成。混合控制原理如图3所示。
2.2 混合控制系统软件设计
2.2.1 软件流程
本系统设计中选用一种简化的ActiveX控件MSComm(microsoft communications control)实现串口通信,采用2.4 GHz蓝牙无线技术,通信协议为RS-232,系统编程环境为Visual C++2010。控制系统流程如图4所示。

图3 混合控制原理Fig.3 Hybrid control theory

图4 控制系统流程Fig.4 Control flow chart
图4中,F1为人手指尖的压力值,F2为灵巧手端的压力值,d为数据手套传感器输出值。采用关节角度控制和压力跟随控制相结合的控制方式,当灵巧手手指末端处于自由空间或与环境接触的作用力F1≤0.28 N时,系统工作于基于数据手套的关节角度控制模式。当灵巧手指与环境接触的作用力大于0.28 N时,系统工作于基于压敏电阻器FSR400的压力跟随控制模式。
2.2.2 关节运动映射
建立 di(i=1,2,…18)和 θi(i=1,2,…18)之间的机械耦合映射关系为

式中:θ为手指每个关节角度数;k为矫正增益参数;d为数据手套对应关节传感器读数(0~255);b为偏差量,是通过标定程序计算得出的矫正参数。将映射得出的对应关节角度数据θ作为控制参数,发送给灵巧手端的处理模块,实现人手到灵巧手间精确的关节运动映射。
3 实验与结果分析
3.1 食指运动信息检测
实验中,测试对象佩戴数据手套,手掌朝下,食指在垂直平面内做周期性的弯曲、伸展运动,其他手指和手掌关节保持不动。将食指运动的起点和终点分别标记为C、D(OC=OD=6 cm),指掌关节和中指节关节分别标记为A、B,在此不考虑关节A在水平面的转动,3关节作平面铰链运动,θ1、θ2分别为指掌关节和中指节关节的弯曲角度。垂直平面内食指屈伸往返运动记为一个完整运动周期,食指运动示意如图5所示。
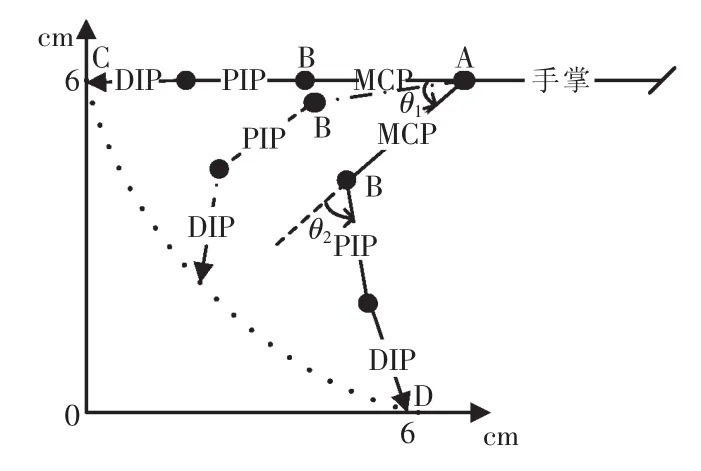
图5 垂直平面内食指运动示意Fig.5 Forefinger’s movements in vertical plane
试验中测试对象分别完成3个运动周期T=1.5 s,5 s,7.6 s,每个周期运动重复10次得到均值及方差,图6~图8为归一化结果。图6~图8依次为T=1.5 s,5 s,7.6 s 3个不同运动时间长度下的关节轨迹曲线均值及方差。其中,实线1为指掌关节A的运动曲线均值,记为A:a;虚线2为指掌关节A运动的方差,记为A:s;虚线3为中指节关节B的运动曲线均值,记为B:a;虚线4为中指节关节B运动的方差,记为 B:s。 食指从 C(0,0)点开始做弯曲运动到达 D(x1,1)点,继续从 D(x2,1)点做伸展运动回到C(1,0)点,完成一个周期的屈伸运动。图 6~图 8中,当 T=1.5 s时,x1=0.36,x2=0.7;当 T=5 s时,x1=0.43,x2=0.55;当 T=7.6 s时,x1=x2=0.5。其中,x2-x1表示食指从弯曲状态变为伸展状态的过度时间。
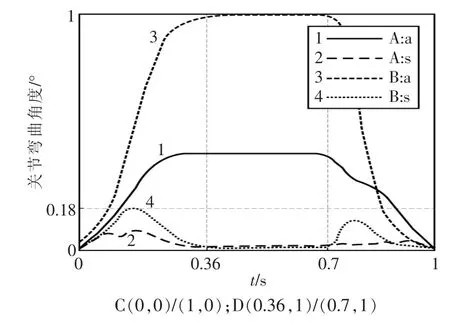
图6 1.5 s关节运动轨迹曲线Fig.6 Joint’s movement curve of 1.5 s
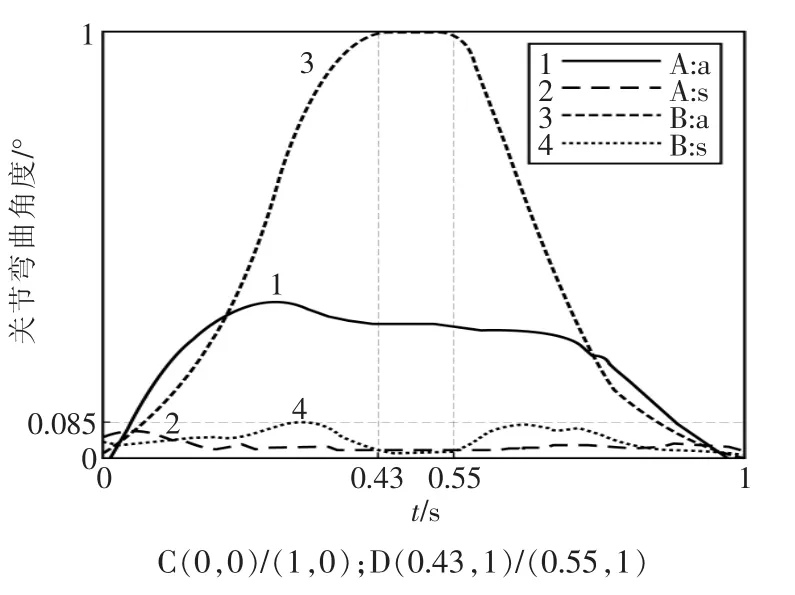
图7 5 s关节运动轨迹曲线Fig.7 Joint’s movement curve of 5 s

图8 7.6 s关节运动轨迹曲线Fig.8 Joint’s movement curve of 7.6 s
由图可见:①运动速度由快变慢的过程中,食指周期性屈伸运动的重复精度先增加后减小。当T=5s时,均方误差小于0.1,效果最好;随着T的增大,运动速度继续减慢,重复精度逐渐减小。②随着运动速度的减慢,抖动增强,曲线的平滑度变差。实验结果表明,手指运动时延特性与运动速度具有非线性增益关系。
3.2 力度控制
灵巧手指尖和数据手套食指指尖均安装有压力传感器,将食指指尖与物体接触产生的作用力由0 N增大至0.6 N,再减小至0 N记为一个运动周期,灵巧手将在垂直平面内完成一个周期的弯曲、伸展运动。将安装有压力传感器的灵巧手指尖位置固定,令食指完成一次周期运动的时间T=15 s,受力从0 N开始连续增大至0.57 N,基本保持恒力(变化幅度<0.03 N)时为 4.5 s。
绘制5个时间周期的力度均值及方差曲线,经自适应小波去噪后的压力跟随曲线如图9所示。图中,实线1为人手和物体接触时作用力变化均值曲线,记为FF:a;虚线2为灵巧手指与接触物体间的作用力均值曲线,记为DF:a;虚线3为人手食指周期运动的方差曲线,记为FF:s;虚线4为灵巧手端力度跟随的方差曲线,记为DF:s。

图9 力度控制曲线Fig.9 Force control curve
当食指指尖与物体间的作用力大于0.28 N时,遥操作控制中周期运动的重复精度逐渐提高,偏差小于0.38 N;当受力在0.57 N~0.6 N间基本保持恒力(变化幅度<0.03 N)时为4.5 s,遥操作控制中周期运动的重复精度大于96.5%,能够达到稳定抓持物体的要求。由此可见,灵巧手指尖力度跟随效果良好。控制时延小于0.68 s,在可接受的范围内。
4 结语
该系统将关节角度映射和压力控制相结合的混合控制策略应用于多关节灵巧手指遥操作控制系统中,成功实现了多关节灵巧手指的精确实时遥操作控制。定量分析了系统的时延特性,实验验证了系统可靠性和控制的有效性。对遥操作灵巧手的设计提供了重要数学分析工具,对新一代简易、高效力反馈数据手套的研制和微创手术机器人系统的力检测研究具有重要的借鉴价值。
[1]Pugin F,Bucher P,Morel P.History of robotic surgery:from AESOP(R)and ZEUS(R)to da Vinci(R)[J].Journal of Visceral Surgery,2011,148(5):E3-E8.
[2]孙中圣,包钢,李小宁.影响数据手套力反馈的因素分析[J].机床与液压,2008(10):21-23.
[3]胡海鹰,谢宗武,李家炜,等.基于指尖位置的人手与HIT/DLR灵巧手运动映射[J].哈尔滨工业大学学报,2007,39(11):1727-1731.
[4]王珺,孙志峻,郭语.基于特征点集的五指灵巧手主从映射方法[J].机械设计与研究,2009,25(5):35-38.
[5]Ozawa R,Ueda N.Supervisory controlofa multi-fingered robotic hand system with data glove[C]//Proc of IEEE/RSJ International Conference on Intelligent Robots and Systems,San Diego:IEEE,2007:1606-1611.
[6]徐莉,刘振方,王建丞,等.仿人机器人综述[J].黑龙江科学,2013,4(7):57-61.
[7]Khushaba RN,Kodagoda S,Takruri M,et al.Toward improved controlofprosthetic fingers using surface electromyograni(EMG)signals[J].Expert Systems with Applications,2012,39(12):10731-10738.
[8]宋爱国.力觉临场感遥操作机器人(1):技术发展与现状[J].南京信息工程大学学报:自然科学版,2013,5(1):1-19.
[9]王华,赵臣,王腾飞.面向虚拟交互操作的力反馈主手控制系统设计[J].机械设计,2015,32(6):99-104.
猜你喜欢
广东气象(2022年1期)2022-03-10
陶瓷学报(2021年4期)2021-10-14
陶瓷学报(2020年3期)2020-10-27
作文中学版(2018年4期)2018-11-28
制造技术与机床(2018年8期)2018-10-09
读者·校园版(2016年20期)2016-11-18
中学生数理化·高三版(2016年2期)2016-09-10
中学生数理化·高二版(2016年6期)2016-05-14
科学中国人(2016年35期)2016-01-28
小学阅读指南·低年级版(2015年12期)2015-12-11
