
码垛机器人示教器的设计与实现
2016-01-19 01:43刘成业姜明明
自动化与仪表 2016年3期
朱 琳,李 倩,刘成业,姜明明
(山东省科学院自动化研究所 山东省机器人与制造自动化技术重点实验室,济南 250014)
示教器作为示教再现型机器人控制系统的重要组成部分,是进行人机交互的重要工具。操作者通过示教器进行手动示教,控制机器人达到不同位姿,并记录各个位姿点坐标,利用机器人语言进行在线编程,实现程序回放,让机器人执行程序要求的轨迹运动,控制机器人完成整个运动过程[1-4]。传统机器人示教器结构封闭、扩展性差、可移植性差,为了克服这些缺点,设计开发了一种新型通用的码垛机器人示教器。该示教器与现有技术的示教器相比,能够实时显示机器人控制端的界面和控制状态,对控制端系统依赖性小,易用性高,通讯距离远,已经应用于码垛机器人项目上。
1 示教器系统设计
一般的机器人系统是由示教器控制系统、机器人控制系统、机器人本体组成。示教器通过总线与机器人控制系统相连,通过总线对机器人控制系统发送相关控制指令,完成对机器人的控制。目前国内外技术市场上,示教器系统大多采用微处理器和嵌入式微控制器作为系统的处理器,示教器和控制器之间多数采用串口进行通讯。这类示教器有个共同的缺点就是对控制器的系统有很大的依赖性,并且受限于串口通讯的速度,通讯速率低,通讯距离短。
本文设计了一款通用的码垛机器人示教器,它是基于键盘和视频信号远程传输的方案。示教器上的按键由微处理器扫描到键值后转成差分信号进行传输,在控制器端转成单端信号给控制器实现对机器人的运动控制。控制器端的单端视频经过差分处理后进行传输,到示教器后再经过处理转成单端信号送给示教器上的液晶屏进行显示,可以通过液晶屏实时观察机器人的运动状态。因为键盘和视频信号均采用差分信号进行传输,而差分信号具有抗干扰能力强、传输距离远等特性,使得示教器与控制器之间的通讯距离可以做到30 m以上。本示教器以微处理器和视频处理芯片为核心,主要部分包括键盘、液晶显示、通讯等模块,其系统结构如图1所示。
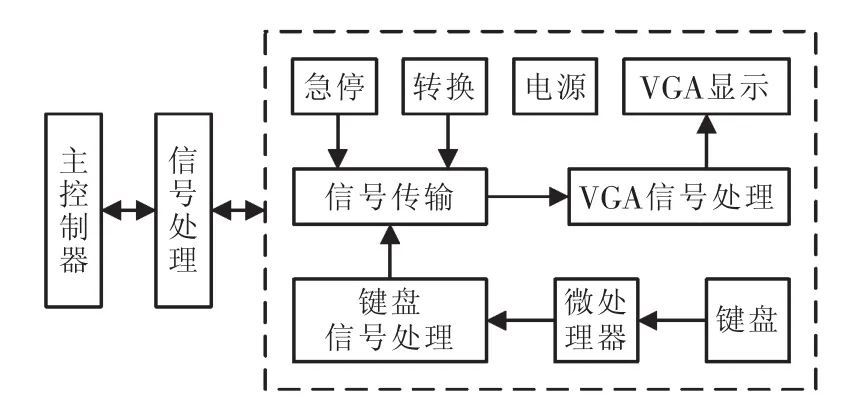
图1 示教器系统结构Fig.1 System structure of the teach pendant
2 示教器硬件设计
示教器的硬件设计包括键盘信号处理模块、视频信号处理模块和电源模块3个部分,下面分别进行详细介绍。
2.1 键盘信号处理模块
键盘是示教器的一个重要组成部分,用来对机器人的运动进行直接控制。本示教器采用独立的9×6矩阵按键,按键接到微处理器的IO端口,通过微处理器端口扫描来确定是否有按键按下。当微处理器扫描到有按键按下时,会确认按键的键值,然后将键值通过串口发出,并经过Max485芯片转成差分信号送给主控制器。主控制器信号处理模块接收到来自示教器的差分按键信号后先经过Max485转成单端的信号,之后再由微处理器将键值转成相应的PS/2信号送给主控制器,实现示教器按键对主控制器的控制。
本系统采用AT89S52作为键鼠信号处理的微处理器,它是Atmel公司生产的低功耗、高性能、片内含8 KB Flash的单片机,支持在系统编程,具有外围硬件电路简单、体积小、可靠性高等优点。
工业现场环境比较复杂,因此设计了按键面膜,用来覆盖在9×6矩阵按键上。一方面可以标识按键的符号,另一方面可以对示教器进行密封,起到防潮、防尘、防油污等作用。
2.2 视频信号处理模块
相比传统的示教器,本示教器的一个重要特点就是视频处理模块。将来自主控制器端的视频信号经过信号处理模块转化成差分信号进行传输。相比单端的视频信号,差分视频信号具有抗干扰能力强、传输距离远等优点[5-7]。
在主控制器信号处理端,采用ISL59311为单端至差分信号的驱动器。ISL59311是Intersil公司生产的带同步编码的高带宽 (250 MHz)三路差分驱动器,可对视频同步信号进行完整的编码,它的输入适合处理单端或差分形式的高速视频或其他通信信号。高带宽也使得差分信号在标准双绞线或同轴电缆线上有非常低的谐波失真,同时,内部反馈保证输出有稳定的增益和相位,以减少辐射的电磁干扰和谐波。嵌入逻辑将标准的视频水平和垂直同步信号编码到双绞线的共模信号上,因此不需要另外的线缆来传输同步信号[8]。ISL59311的原理框图如图2所示。
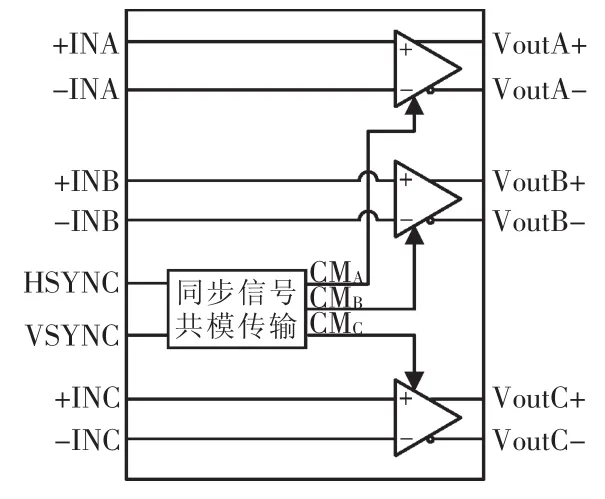
图2 ISL59311原理框图Fig.2 Block diagram of ISL59311
视频信号通过VGA接口与ISL59311输入端的75 Ω的终端电阻相连,五路单端信号(RGB颜色信号以及行场同步信号)分别与ISL59311输入端的INA+、INB+、INC+以及 HSYNC 和 VSYNC 相连,其负颜色分量INA-、INB-、INC-接地。单端的RGB信号被转换为差分信号,HSYNC和VSYNC在3个差分信号各自的共模信号上进行编码。ISL59311的50 Ω终端输出驱动差分R,G,B信号,通过CAT-5双绞线电缆中3对线缆进行传输。本设计中选取单电源供电,供电电压取5 V,芯片的总功耗约为0.3 W。
在示教器端,采用ISL59911,它是三通道差分接收器和均衡器,带宽为250 MHz,适用于VGA信号处理。ISL59911的原理框图如图3所示。ISL59911具有手动和自动偏移校准功能,±4 dB的增益调整范围,调整精度为0.1 dB[9]。
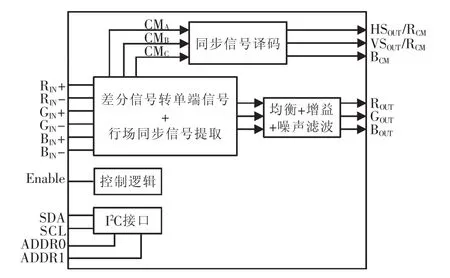
图3 ISL59911原理框图Fig.3 Block diagram of ISL59911
ISL59911可对水平和垂直方向上的信息进行共模译码,该信息由ISL59311的3个差分输入端编码,因此仅用3对电缆,就可完整地传输RGB视频信号和行场同步信号。ISL59911为双电源供电,供电电压范围为±5 V,逻辑值在0~+5 V之间,芯片的总功耗约为1.1 W。
ISL59911还有一个重要的特点是具备I2C(interintegrated circuit)接口,在本设计中将I2C接到微处理器。微处理器通过该接口完成对ISL59911芯片的初始化和校准,并且可以通过修改ISL59911内部寄存器的值来设置VGA信号在CAT-5类非屏蔽双绞线要传输的距离。
示教器的显示屏采用5.6寸TFT彩屏,分辨率为480×320。显示屏自带驱动模块,显示接口为VGA接口。将ISL59911输出的RGB颜色信号以及行场同步信号接到VGA接口上,实现对主控制器端视频信号的显示。
2.3 电源模块
示教器的供电来自机器人主控制器,主控制器只能提供12 V的电源。示教器正常工作需要±5 V的电压,需要通过电源模块对电压进行转换。12 V转5 V的电源芯片采用了TI的TPS54325,它是一款同步降压稳压器,具有可调的软启动功能,最大输出电流3 A,可以工作在-40℃~85℃。
-5 V电压输出芯片采用了TI的TPS63700,它是一款负压输出的开关电源稳压器,输入电压为2.7~5.5 V,电压转换效率高达84%,最大输出电流1 A,具有内部电流保护、过压保护、过热保护等功能,可靠性高。
为了机器人的使用安全,在示教器上设计了急停和切换开关。急停开关用来处理紧急情况下机器人的控制。按下急停开关可以切断接触器的供电从而使机器人停止动作。切换开关用来控制各轴伺服电机上下电,应用于手动示教过程中。
3 示教器软件设计
示教器的软件设计主要包含示教器键盘扫描和键值发送、ISL59911的初始化和校准、主控制器端信号处理模块的键值接收和PS/2格式发送,它们均是通过微处理器AT89S52来完成。在示教器端,微处理器循环扫描矩阵键盘,如果有按键按下,将对按下键值进行识别,并将识别到的键值通过串口发送。软件流程如图4所示。

图4 示教器软件流程Fig.4 Flow chart of the teach pendant
在主控制器端信号处理模块,微处理器接收来自示教器的键值信号并将键值以PS/2格式发送给主控制器。其软件处理的流程如图5所示。
4 测试结果
示教器的软硬件模块功能调试完毕后,搭建了测试实验系统,示教器通过10 m的线缆接到机器人控制柜上,示教器的实物如图6所示,在工业现场对示教器的功能进行验证。系统上电后,观察示教器屏幕上的图像,发现图像显示清晰,没有拖尾和闪烁。示教器按键功能正常,可以通过示教器上按键对码垛机器人进行示教和编程任务,实现了示教器的预期功能。
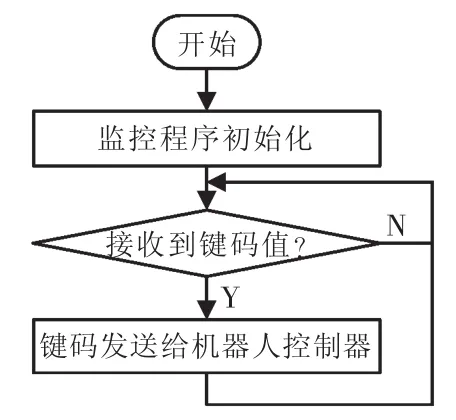
图5 主控制器端信号处理软件流程Fig.5 Flow chart of signal processing in main controller

图6 示教器实物Fig.6 Photo of the teach pendant
5 结语
设计了一款通用码垛机器人示教器,采用基于键盘和视频信号远程传输的方案,克服了传统示教器操作灵活性差、扩展性差等缺点。实际应用表明,该示教器能高效灵活地完成复杂码垛任务的示教,控制反应迅速、操控效果良好并且具有很强的抗干扰能力,能够满足工业码垛机器人对示教器功能的要求。
[1]吕亭强,罗庆生,姚猛.工业码垛机器人示教技术的研究与改进[J].计算机测量与控制,2011,19(4):950-953.
[2]杨敏,王品,郑玉虎.人机会话方式的机器人示教盒的设计[J].组合机床与自动化加工技术,2013(2):127-129.
[3]吴向垒,谢存禧.开放式机器人的示教系统研究[J].机电产品开发与创新,2009,22(2):8-10.
[4]洪鹰,王乐.基于嵌入式计算机的机器人示教器研究[J].计算机工程与应用,2013,49(1):78-81.
[5]李致金,吴文娟.VGA信号分配及远程传输系统[J].现代电子技术,2010,33(23):168-173.
[6]陈建平,张辉.高分辨率VGA模拟差分信号处理技术与应用[J].软件,2011,32(12):59-62.
[7]任君,徐超,李周奎,等.高清视频VGA模拟差分信号的远距离传输系统设计[J].光学技术,2013,39(5):433-437.
[8]Intersil Inc.Differential Video Amplifier with Common Mode Sync Encoder and Serial Digital Interface:ISL59311[EB/OL].http://www.intersil.com,2011.
[9]Intersil Inc.250MHz Triple Differential Receiver/E-qualizer with I2C Interface:ISL59911[EB/OL].http://www.intersil.com,2011.
猜你喜欢
——信号处理
无线电工程(2022年10期)2022-10-24
潍坊学院学报(2021年2期)2021-07-22
装备制造技术(2020年3期)2020-12-25
电脑爱好者(2020年18期)2020-09-26
重型机械(2020年3期)2020-08-24
电子制作(2019年20期)2019-12-04
电子制作(2019年14期)2019-08-20
制导与引信(2017年3期)2017-11-02
电脑爱好者(2017年9期)2017-06-01
科技传播(2011年4期)2011-04-13
