BP神经网络在电动车充放电控制中的应用
2016-01-19 11:41荣盘祥王子旭高生宇
哈尔滨理工大学学报 2015年5期
关键词:BP神经网络
荣盘祥++王子旭++高生宇


摘要:纯电动车作为一种节能环保的交通工具已成为各国研发的热点,纯电动车的续航能力问题是电动车发展中的重要因素,针对电动车在使用过程中由于受电池有限电量的限制以及外界环境因素的影响,导致电动车的续航能力短的问题,依据电动车工作原理结合BP神经网络技术,通过综合分析电动车驱动策略和电动车工作模式,提出一种新的基于BP神经网络充放电控制策略-使用LabVIEW结合驾驶仿真平台建立了电动车仿真模型,并进行仿真实验.通过仿真实验验证了基于BP神经网络控制策略的合理性,达到了提高电动车的续航能力的目的.
关键词:纯电动车;充放电控制;BP神经网络
DOI:10.15938/j.jhust.2015.05.016
中图分类号:U469. 72
文献标志码:A
文章编号:1007-2683(2015)05-0080-05
0 引言
电动车动力电池组的性能直接关系到电动车的各种性能及电动车的使用寿命,因此必须对电动车电池组中存储的电能进行有效利用以提高电动车性能降低电动车运行成本.由于电动车在运行过程中受到多方面不确定的因素的影响,因为神经网络可以学习和储存大量的输入和输出设置的映射关系,它不需要揭示的映射关系的数学表达.因此本文提jl的基于BP神经网络的纯电动车电池充放电控制策略可以更好的应对电动车在运行过程中遇到的各种不确定因素.
1 充放电控制策略分析
电动车充放电控制策略实际上是根据电池当前SOC状态和驾驶员的操作行为以及车辆的当前状态对电池进行充放电控制,从而达到对电动车车速的控制.由于电动车的运行受到电池状态的影响与限制,因此驾驶员操作电动车以一定的状态运行时,充放电控制系统会根据电池当前的状态确定能不能满足驾驶员的操作.如果在电池允许的工作范围内则满足驾驶员对车辆的操作,否则充放电管理系统会按照自己的判断给出对车辆的控制信号.
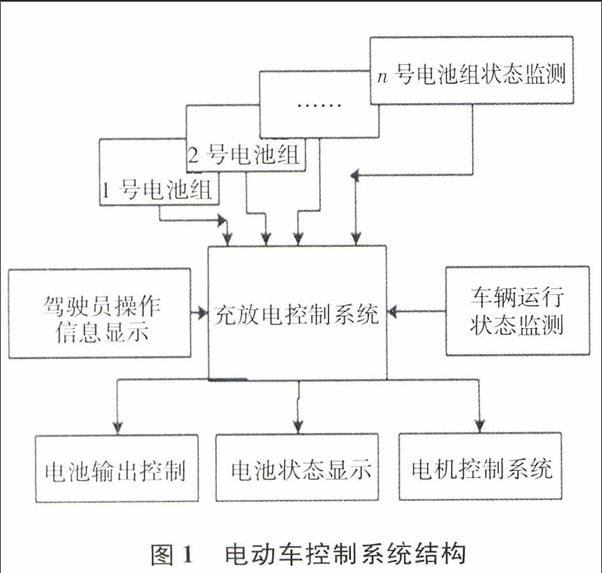
1.1 充放电控制系统结构与控制策略
纯电动车充放电控制系统结构图如图1所示,其中电池组状态监测模块用于监测并显示电池组的状态参数,充放电控制模块是算法处理与发送控制指令的机构,该模块通过串行总线接收电池检测模块的实时电池状态信息和驾驶员操作信息,并按照指定的方法进行推理和计算,能够给出满足电动车动力性能和平稳性能的最佳控制命令,
纯电动车充放电控制系统的主要任务就是结合驾驶员的操作指令以及电池当前的状态信息,在实现整车动力性能的前提下达到节能的目的.其具体日标是:低耗能、响应快、实时性好、限制电池SOC的范围等,本文提出的控制策略的输入主要有加速踏板行程Kacc,制动踏板行程Kbre以及SOC.输出为电池输出功率Pout.电池输出功率首先取决于驾驶员的操作命令同时受到到电池当前状态的影响,电池SOC直接影响电池的最大输出功率.电动车在正常行驶过程中电池soc和电池输出功率以及电机输出功率要满足以下约束条件,储能系统SOC约束:为了延长电池的寿命,车辆在行驶过程中电池SOC尽量要保持在一定的范围之内,即:
在制动过程中,如果SOC太高,为了防止电池过充就不能对电能进行回收.同样如果SOC太低,再继续放电则会造成电池过放,从而影响电池寿命和电动车的动力性能.因此电池的SOC -般应保持在[0.2,0.9].
功率约束:为了满足驾驶员对车辆的动力性能要求,一般情况下电动车的输出功率Pout都会等于驾驶员的请求功率Preq,如果电池当前能输出的最大功率Psoc不能满足驾驶员的请求功率则输出功率应等于电池当前支持最大输出功率,即:
综合以上分析本文给出的纯电动车的充放电控制流程图如图2所示.因为电池的输出功率功率与电池当前SOC值以及电池效率有关,考虑到计算的复杂和参数难以估计,所以会导致时效性较差,而且难以应用到实际的控制系统中去.为此本文通过离线仿真的方法将充放电控制策略的控制规律提取出来,这些控制规律的集合可以作为一组多输入单输出的非线性映射.因为神经网络能够以最小的精确度切近任何复杂的非线性映射集合,并且神经网络的最大特点是有很强的学习能力和归纳总结能力.因此可以通过训练相应的神经网络来实现本文所提出的充放电控制策略.
1.2 基于神经网络的充放电控制策略
1.2.1 神经网络控制器结构
只要BP神经网络中神经元的点数合理,那么该神经网络就具有模拟任何复杂的非线性映射的功能,基于神经网络的这种特点,本文所设计的神经网络结构图如图3所示,该神经网络是一个含有2个隐含层的4层BP神经网络,其中SOC、Kbre、Kacc作为该神经网络的输入层,Pout作为该网络的输出层,在本文中隐含层的神经元的个数的确定采用试凑法确定,输出层神经元可以表达为
式中:Pout是神经网络控制器的输出,代表电池的输出功率;Wj表示隐含层的第j个神经元和输出层的神经元之间的链接权值; 表示输出神经元的阈值;n表示隐含层神经元的数目;.厂为采用的s型激活函数;在神经网络隐含层中的第j个神经元的输出值yj,可表示为
式中:Xi(t)(i=1,2,3)表示SOC、Kbre、Kacc三个输入信号;wij(i=1,2,3;j=1,…,n)表示输入层到隐含层的链接权值;bj为隐含层第j个神经元的阀值.
1.2.2 训练样本获取与网络训练
神经网络性能的好坏与训练该神经网络所用的样本有着密切的关系,因此训练样本一定要具有代表性,在选择样本时一定要照顾样本的多样性和均匀性.因为随着网络输入神经元的个数的增加,所需要的训练样本数会迅速增加,如果在选择样本时不按照一定的规律而是随意选择,这样很容易会出现样本冗余,过量的冗余样本不仅不会提高神经网络的训练速度,更重要的是因为样本信息含量过多从而导致网络出现过拟合现象,
因此,在本文中首先在多个行驶工况中均匀地设置不同的SOC值(例如SOC从0.2变化到0.8,间隔为0.1)和加速踏板行程(例如Kacc的值从0变化到10,间隔为1.0)以及有无制动动作.在本文中神经网络的输出Pou,可以选用瞬时优化能量管理策略求出最优的电池输出功率Pprov作为控制规则,该规则的输入与输出与神经网络的输入与输出相对应,将求出的所有控制规则作为该网络的训练样本,因为该样本的选取是基于均匀设置SOC值以及加速踏板行程,所有该样本是一个多样性较好的均匀的离散样本,
为了加快神经网络的收敛,同时避免神经网络的各个输入输出数据的量纲差异,因此,需要对输入和输出数据进行标准化.本文对输入与输出的数据限定在[0,1]范围内,在[0,1]范围内的网络输入和输出值的换算公式为:式中:xi为网络输入或者输出数据;xmin为所有训练样本的输入、输出最小值;xmax为该样本输入、输出数据最大值.
用以上方法得到训练样本之后,可以借助MATLAB编写程序建立本文设计的神经网络进行训练.收敛速度慢过慢和训练时间过长等是标准BP网络在训练过程中常见的问题,为了在较短的时间内得到收敛速度,本文使用了Levenberg-Marquardt算法进行训练.因为该算法一方面融合了高斯一牛顿法局部收敛性的优点,另一方面又融合梯度下降法的全局特性.
为了验证文中所提出的神经网络的收敛性,本文借助Matlab中的Simulink工具对该神经网络进行仿真分析.对文中提到的算法构成的BP神经网络进行仿真比较,在本文中假设需要逼近的非线性函数为:sm(x)+cos(x),我们使用文中提到的三层神经网络对其进行逼近仿真,可以得到仿真图和误差曲线图如图4和图5所示.
由图4和图5可知,该神经网络经过1400次的训练后仿真结果误差为0.01.所以本文所选用的神经网络逼近非线性函数的效果是比较理想的,由此可知该神经网络完全可以满足本文的需要.
2 实验仿真与结果分析
为了验证本文所提出的BP神经网络在电动车充放电控制的有效性,本文以LabVIEW为核心开发的电池模拟测试系统结合模拟驾驶系统和智能充放电机系统建立的纯电动汽车模型.将以上得到的神经网络控制器应用到充放电控制系统中去,在搭建的纯电动车仿真环境中针对不同的形式工况进行仿真研究,并在相同的工况下比较基于该神经网络控制算法与传统控制算法下电池组电荷状态变化曲线以及电池输出功率和期望输出功率的对比图如图6和图7所示.
由图6可见,在相同的工况下基于BP神经网络的充放电控制策略的SOC曲线的最终值为0.583,而基于传统方式的控制策略下的SOC曲线的最终值为0.575,所以可以有效提高电动车的续航能力.同时从该仿真结果中可以看出,在相同的工况下,基于神经网络的控制策略可以有效避免电池瞬间较大的放电电流,从而可以很好的保护电池提高电池的寿命,这是传统的控制方法不能达到的效果.因此,可以验证本文所提出的基于BP神经网络的纯电动车充放电控制策略的有效性以及相对于传统控制策略的优越性.
由图7可见,电池的实际输出功率和期望输出功率大致相同,但是还存在一定的误差.综合分析产生误差的原因有以下可能因素:首先从图中可以看出功率期望输出相比于实际输出有一定的滞后时间;其次误差产生的可能原因是本文选取的样本不够理想或者样本数量还不够大;最后南于本文所设计的神经网络中神经元的个数是通过试凑法得到的,所以该神经网络还有待进一步优化和完善.
3 结语
针对纯电动汽车续航能力短的问题提出一种基于BP神经网络的动力电池充放电控制策略,在Matlab中实现该算法,并通过以LabVIEW为核心开发的纯电动车模型进行仿真,仿真结果说明了本控制策略相比传统的控制策略在提高电动车的续航能力上有了较大的提高,通过仿真实验进一步验证了该控制策略的有效性。
本文在实验室中是在一种理想的环境下的实验只考虑到了驾驶员的操作,但是外界环境因素也会对动力电池性能产生一定的影响.因此在实际应用中应该考虑电动车所处的湿度、温度等环境因素,所以如何将该控制算法应用到实车控制将是本文下一步需要重点研究的内容.
猜你喜欢
商情(2016年43期)2016-12-23
软件导刊(2016年11期)2016-12-22
软件导刊(2016年11期)2016-12-22
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
考试周刊(2016年21期)2016-12-16
现代经济信息(2016年27期)2016-12-16
价值工程(2016年30期)2016-11-24
数字技术与应用(2016年9期)2016-11-09
软件导刊(2016年9期)2016-11-07