
用于玻璃幕墙清洗的爬壁机器人的研制
2016-01-17 19:41
自动化与仪表 2016年5期
(北京航空航天大学 机器人研究所,北京 100191)
现代城市高楼林立,出于美观与采光方便的考虑,高楼壁面多采用玻璃幕墙结构,由于常年风吹日晒,玻璃幕墙需经常进行清洁维护。经调查发现,壁面清洗行业存在以下特点:第1,市场需求量大;第2,工作量大、工作强度高、工作环境恶劣;第 3,需要重复进行操作,适合实现作业自动化[1]。目前,高楼的玻璃幕墙大多还是依靠人工进行清洗,然而人工清洗必定会有一定的危险,价格昂贵且效率普遍较低,而且需要重复作业。随着移动机器人[2-4]技术的进步,机器人已经被越来越多地应用到了实际作业中去。其中爬壁机器人在壁面特种作业中有着广泛的应用,将其应用于玻璃幕墙的清洗,既可以降低人工操作的危险性,又可以提高玻璃幕墙清洗的效率和智能化水平。
本论文结合国内外爬壁机器人结构设计和玻璃幕墙清洗技术的研究成果,设计了一种用于玻璃幕墙清洗的并且可跨越10~15 mm沟槽的双腔体负压爬壁机器人。该机器人能够在玻璃壁面上自由行走并通过前端安装的清洗机构对玻璃进行喷水清洗作业。目前已开发完成了清洗机器人样机,并通过样机实验和性能分析验证了将爬壁机器人作为玻璃幕墙清洗作业的可行性与合理性。
1 总体方案介绍
爬壁机器人必须具备吸附和移动2个基本功能。吸附方式可分为负压吸附、磁吸附、静电吸附、特种吸附等。移动方式有轮式、十字框架式、履带式和步足式等。对于本文研究的爬壁机器人来说,由于其作业环境为光滑的幕墙玻璃,并且要求机器人的体积和质量不能过大,同时要求机器人移动灵活、操作简单,还有考虑到机器人要能够跨过幕墙玻璃间的凹槽,因此机器人整体设计时采用了双腔体负压吸附方式以及轮式移动方式。
考虑到机器人清洗机构原理与清洗作业的方便性与可行性,当前玻璃清洗机器人的清洗方式主要是刷洗式。该工艺是目前最常用的清洗方法,通过清洗液的溶解与刷子的机械摩擦双重作用清洗污垢,适用于硬质物品的表面去污。刷洗方式可分为滚筒刷洗式、涡旋刷洗式、移动刷洗式3种[5]。滚筒刷洗式和涡旋刷洗式机械结构较为复杂,并且尺寸以及重量不适合小型清洗机器人。本文借鉴了汽车清洗玻璃的方案,由雨刮电机直接驱动雨刮机构完成清洗作业。此结构简单安装方便并且效率较高。同时装在机器人尾部的刮条可以刮去残留的液滴来获得清洁的幕墙玻璃表面。
综上所述,机器人擦洗高楼玻璃的总体方案设计如图1所示。

图1 玻璃幕墙清洗的总体方案Fig.1 General scheme of glass-cleaning
具体工作过程如下:将机器人尾部绑上绳索,另一端固定在高楼楼顶,或者从中间某层窗口伸出绳子和电线,从该层的玻璃窗开始自上向下地进行清洗作业;过程中,楼下的操作者遥控机器人进行清洗作业,通过观看机器人摄像头拍摄并回传到Android手机端的视频图像来判断玻璃的清洗状况,并适时操控机器人行走、喷水以及清洗动作;清洗作业时,机器人从上到下依次清洗。清洗完一列玻璃之后,再从上到下依次清洗第二列玻璃。这种从上到下的清洗方式与从下到上的清洗方式对比,避免了污水倒流造成对已清洗完玻璃的污染,同时也避免了机器人在吸附的玻璃面转弯等危险且耗时的多余动作,提高了机器人清洗的效率和操作安全系数。
2 机器人结构设计
玻璃清洗机器人的机械系统主要由底盘结构、移动模块、风机吸附模块、清洗模块和视频监控模块5部分组成,清洗机器人的整体结构装配如图2所示。

图2 机器人整体装配Fig.2 Assenmbly drawing of the robot
2.1 底盘结构模块
负压式爬壁机器人整体设计时,自身重量是必须要考虑的关键因素,包括零部件选型时重量参数也是重要参考指标;因为机器人吸附在玻璃移动时,必须要依靠玻璃面的摩擦力来抵消自身重力才能保持平衡避免跌落,产生摩擦力所需的正压力需通过风机旋转产生的负压来提供。重力越大所需平衡的摩擦力也越大,同时风机转速也越大,从而造成机器人功耗的提高以及噪音分贝的加大。这点将在后面吸附模块时再详细阐述,在此不做赘述。
为减轻机器人的整体重量,机器人的底盘选用高强度低密度的ABS材料,并采用最新的3D打印技术来加工。相比传统的机加工,3D打印技术提高了精度的同时,也降低了加工难度,能够轻松达到传统机加工很难完成甚至根本完不成的加工需求,并且也降低了成本。
为了提高机器人的便携性以及降低加工难度,底盘采用模块化组装的思想,通过前后2个底盘模块拼接组成,连接处做成了类似燕尾槽结构的插装结构,方便连接。同时通过镁铝合金连接板,把前后2个模块连接起来,增加了整体结构的刚度。
2.2 移动模块
清洗机器人采用轮式移动机构,分别由2个12 V直流伺服电机驱动2个主动轮,并通过同步带将运动动力传递给2个被动轮系使得4个轮子都为驱动轮,保证了机器人拥有足够的驱动力来克服自身重力和所受摩擦力,能够在玻璃面移动并且完成清洗作业。电机减速器输出轴通过刚性联轴器和轮子相连,轮子由轮毂、轮套、同步带轮,主动轴轮系组成。
爬壁机器人的抗倾覆性是很重要的一个参数,它决定了机器人能否在玻璃面上安全平稳的吸附。机器人的清洗工作路线是在玻璃面上从上到下依次擦洗,取此时的机器人匀速向下行走时的受力如图3所示。雨刮和电机轴固定处有弹簧使雨刮压紧玻璃面,同时雨刮受到玻璃面的反作用力F1。机器人风机产生负压,从而依靠大气压把机器人压紧在玻璃上,Fp1和Fp2分别为2个风机产生的负压产生的压力,N1和N2分别为玻璃面给机器人轮子的正压力,f1和f2分别为机器人吸附在玻璃面上时轮子所受的摩擦力。F2为机器人所受安全绳的拉力,实际清洗工作时会用到,此时受力分析时暂且不考虑F2。机器人重力为G,作用在机器人重心O处。L1和L2分别为所受大气压力距离轮子支点的距离。L0为Fp1和Fp2之间的距离。Lf为清洗位置距离机器人底盘前端的距离。Na为作用在密封圈上的等效支持力的合力。机器人的重心相对于玻璃面的高度为h,如图3所示。
以z为支点,机器人的倾覆力矩为
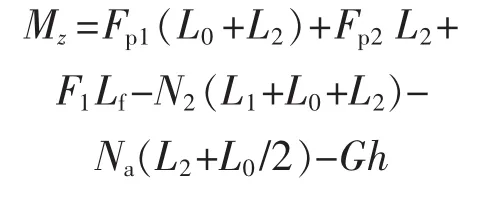
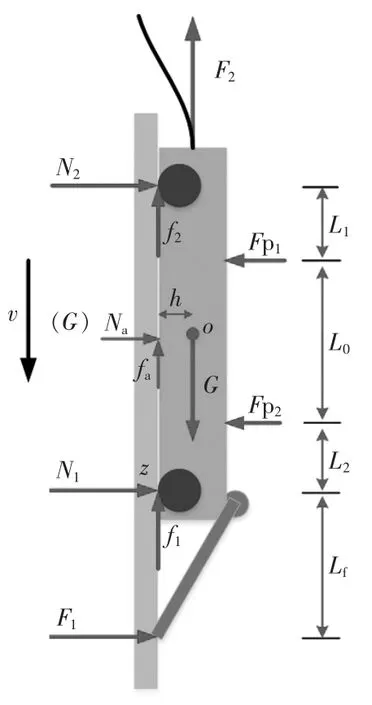
图3 吸附时受力Fig.3 Absorbing analysis graph
其中,Mz为以z为支点时,机器人的受力矩之和。如果Mz≥0,则机器人能够吸附在玻璃上,且Mz值越大,则机器人吸附性能越好。在下文的样机实验阶段中,没有用安全绳的情况下,机器人可以平稳地吸附在壁面上,验证公式的正确性。同时,由公式可知,降低机器人的重心可以显著提高抗倾覆力矩;同时减小机器人前后轮子的间距,也可以增大Mz的值,从而增加机器人吸附的安全性。
2.3 吸附模块
吸附模块选用外转子直流无刷电机作为动力源,电机带动径流式离心叶轮旋转作为负压发生装置,叶轮旋转时通过导流罩,把密闭腔体中的空气抽出从而形成负压使机器人吸附在墙面上。无刷电机由电调驱动,通过频率20 kHz的PWM波可以方便地控制电调进而调节无刷电机转速。
机器人的清洗模块主要由清洗机构和喷水电机组成。考虑到爬壁机器人的轻量化设计原则,清洗机构不能复杂并且结构尺寸不能太大,否则不适用于小型机。因此清洗装置采用类似于汽车玻璃窗清洗的机构,由雨刮电机轴带动雨刮装置进行周期性的摆动来擦洗玻璃面。同时喷水电机间歇性的喷出清洗液,乳化分解玻璃面杂质,提高擦洗质量。最后安装在机器人尾部的刮条刮去轮胎印痕和杂质污水,提高机器人清洗效率。
由于是第一代样机,没有为机器人开发图像识别功能,因此清洗效果判断只能通过机器人前端的摄像头拍摄视频,然后实时回传给手机端的遥控操作人员进行甄别。摄像头是720P高清镜头,并且自带夜视仪,内置麦克风,模块通过USB2.0接口连接无线模块,无线模块通过无线网络WiFi信号和Android手机建立通信。通信连接传输方式是TCP/IP协议。具体情况,后面控制部分会做详细说明,此处不再赘述。
3 控制系统设计
清洗机器人的控制系统分为Android上位机客户端程序和下位机STM32单片机程序,上下位机之间通过无线WiFi模块建立通讯关系。
机器人的整体控制系统结构框图如图4所示。机器人的控制流程可描述为操作人员通过Android手机的人机交互界面输入控制指令,指令按照WiFi通讯协议打包,通过无线WiFi传送至机器人的无线模块,无线模块内刷有Openwrt路由系统,按照通讯协议对发送的指令进行解析,然后数据通过串口和STM32单片机串口相连,最后单片机程序解析出每帧字节的协议,实现对风机、舵机以及行走电机的控制。

图4 控制系统结构Fig.4 Structure diagram of control system
在清洗装置的左右运动极限位置安装有光电开关,在清洗装置运动到靠近极限位置时,光电开关就会产生信号,通知单片机改变电机转向。
上位机程序采用Eclipse软件开发,本程序可运行在基于Android 4.4版本的锤子手机Smartisan OS 2.0系统下;界面划分为运动方向控制、速度指示、网络连接状态指示、清洗动作控制、风机控制以及舵机控制等几个功能区域,并具有拍照保存在本地的功能。
下位机控制板采用了时下非常流行的ST公司的STM32F103主控芯片,它是基于ARM内核的32位处理器,主频达到72 MHz,256 K的片上Flash,64 K的SRAM,4个普通定时器,2个高级定时器,5个USART接口,多达16路的PWM波输出,资源丰富,完全满足本项目程序的开发需求。下位机主控程序流程如图5所示。
4 样机简介与测试实验
清洗机器人的样机整体参数如表1所示。
清洗机器人在玻璃壁上清洗工作时如图6所示,机器人可以平稳地吸附在玻璃壁面上,使用Android手机通过无线WiFi和机器人上位机完成通信,机器人接收Android手机指令并完成雨刮的清洗作业。经测试,机器人吸附平稳。在机器人后部加装安全绳之后,在玻璃壁面上自上而下的运动即可更加安全可靠地完成清洗作业。

图5 下位机程序流程Fig.5 Flow chart of lower program

表1 机器人样机参数Tab.1 Parameters of sample robot

图6 机器人吸附和清洗工作展示Fig.6 Display of working state
另外,当机器人吸附在玻璃面上完成原地转弯运动实验中,机器人逆时针转弯时会产生向下的滑移,这是由于自身重力以及吸附力不足导致的。越沟槽试验中,所选取的凹槽宽度为15mm。实验证实,机器人在跨越凹槽的过程中,移动平稳,吸附正常。
5 结语
本文依据高楼玻璃幕墙清洗的需求,提出了一种可组装的双体爬壁玻璃清洗机器人的设计方案,并对该设计方案进行了总体结构设计以及控制系统设计,并确定了对具有凹槽玻璃幕墙的清洗方案和路径规划。对机器人样机进行了多项实验测试,包括吸附实验、爬行实验、转弯实验以及清洗动作实验等。经测试实验表明,该样机主控系统工作稳定,风机电机功率强劲,机器人吸附稳定,移动以及转弯方便灵活,可跨过宽度为15 mm左右的凹槽。经过实际玻璃幕墙清洗的实验,机器人尚存在清洗不够干净的问题,等待后期进一步解决。该玻璃清洗机器人作为样机设计实验测试,为后期玻璃清洗机器人设计提供了一种思路和借鉴。
[1]杨小彪.高层建筑清洗行业的现状与市场浅析[J].洗净技术,2003(3):46-48.
[2]付宜利,李志海.爬壁机器人的研究进展[J].机械设计,2008(4):1-5.
[3]Wu Shanqiang,Li Mantian,Xiao Shu,et al.A wireless distributed wall climbing robotic system for reconnaissance purpose[C]//Proceedings of the 2006 IEEE International Conference on Mechatronics and Automation,2006:1308-1312.
[4]Y Wang,S Lisu,D Xu.Development& application of wallclimbing robots[C]//Proceedings of the 1999 International Conference on Robotics&Automation,1999:1207-1212.
[5]王妹婷.壁面自动清洗机器人关键技术研究[D].上海:上海大学,2010.
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
中国特种设备安全(2022年4期)2022-07-08
建材发展导向(2021年16期)2021-10-12
建材发展导向(2021年11期)2021-07-28
建材发展导向(2021年10期)2021-07-16
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
建材发展导向(2019年10期)2019-08-24
中国棉花(2017年10期)2017-11-04
北京航空航天大学学报(2016年6期)2016-11-16
