循迹机器人控制系统设计
2016-01-16 06:44:55罗儒,张文莉,于婷
现代机械 2015年4期
循迹机器人控制系统设计
罗儒1,张文莉1,于婷2
(1.贵州大学电气工程学院,贵州贵阳550000;2.长春轨道客车装备有限责任公司国凯公司,吉林长春130062)
摘要:基于单片机控制的自动循迹机器人系统可广泛涉及于探测、工业、生活中。循迹机器人是一个应用传感器、控制器、驱动及外加扩展的自动化技术,按照预先设定的模式或者轨迹来进行自动循迹导航的高新技术。设计简易循迹小车,采用STC89C52单片机作为小车的控制芯片;采用TCRT5000红外光电对管对地面黑色轨迹进行检测,将其信号反馈回单片机,单片机对其反馈信号进行分析并采用PWM控制直流电机的转速修正小车的移动方向,实现小车自动循迹的目的。
关键词:STC89C52PWM红外光电对管自动循迹
中图分类号:TP273文献标识码:A
作者简介:罗儒(1992-),男,贵州大学电气工程学院检测技术与自动化装置专业硕士研究生,研究方向:传感器技术。
收稿日期:2015-04-03
Tracking robot control system design
LUO Ru,ZHANG Wenli,YU Ting
Abstract:Automatic tracking robot based on singlechip microcomputer control system can be widely involved in detection, industries and everyday life. Tracking robot is a kind of automation technology which involves the application of sensor, controller, drive and additional devices to realize automatic tracking and navigation according to certain preset mode or path. This paper designs a simple tracking car with STC89C52 single-chip microcomputer as the control chip; Using TCRT5000 infrared double photoelectric cell to test the ground for black trajectory, the signal is sent back to the singlechip microcomputer which then analyzes the signal and adopts PWM to control the dc motor’s speed so as to correct the moving direction of the car, and to achieve the goal of automatic tracking.
Keywords:STC89C52;PWM;infrared double photoelectric cell;automatic tracking
0引言
随着控制技术、计算机技术和信息技术的发展,智能车在工业生产和日常生活中已经扮演了非常重要的角色。近年来,智能循迹车在野外、道路、 现代物流及柔性制造系统中都有广泛运用,已成为人工智能领域研究和发展的热点。为了适应机电一体化的发展在汽车智能化方向的发展要求,提出简易智能小车的构想,通过独立设计并制作一辆具有简单智能化的简易小车,获得项目整体设计的能力,并掌握多通道多样化传感器综合控制的方法[1]。
1系统总体设计
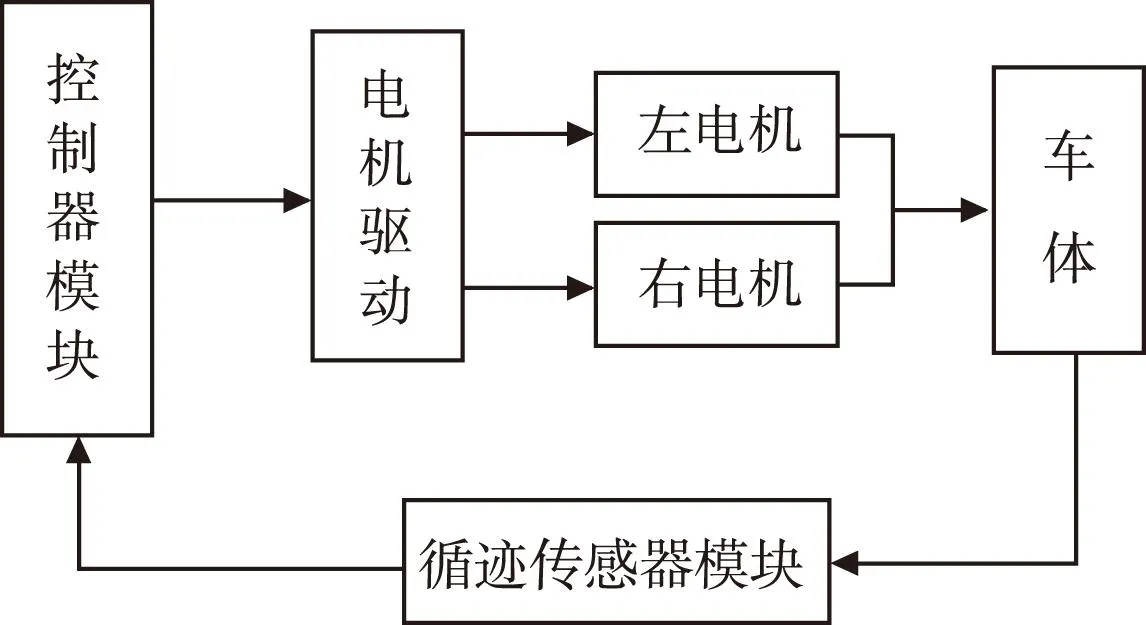
图1 自动循迹机器人系统总体框图
循迹机器人设计将设计一个小车,能够沿着黑线进行循迹并沿着黑线轨迹进行移动。小车采用前左右轮驱动,后车体装万向轮。前车体左右两轮采用两个直流减速电机驱动,通过改变直流电机转速改变方向。在车体前部装有四个光电对管红外传感器,分别布置于两个左车体,两个右车体。传感器感知黑线布局,检测到有无黑线将数据传给主控芯片,主控芯片收到数据后根据算法做出相应判断并控制左右直流电机转速进行左右方向修正[2-3]。系统框图如图1所示。
2系统硬件设计
2.1主控制模块的设计
本次设计使用STC89C52单片机。STC89C52单片机是STC公司生产的一种低功耗、高性能的8位微处理器。单片机最小系统如图2所示。
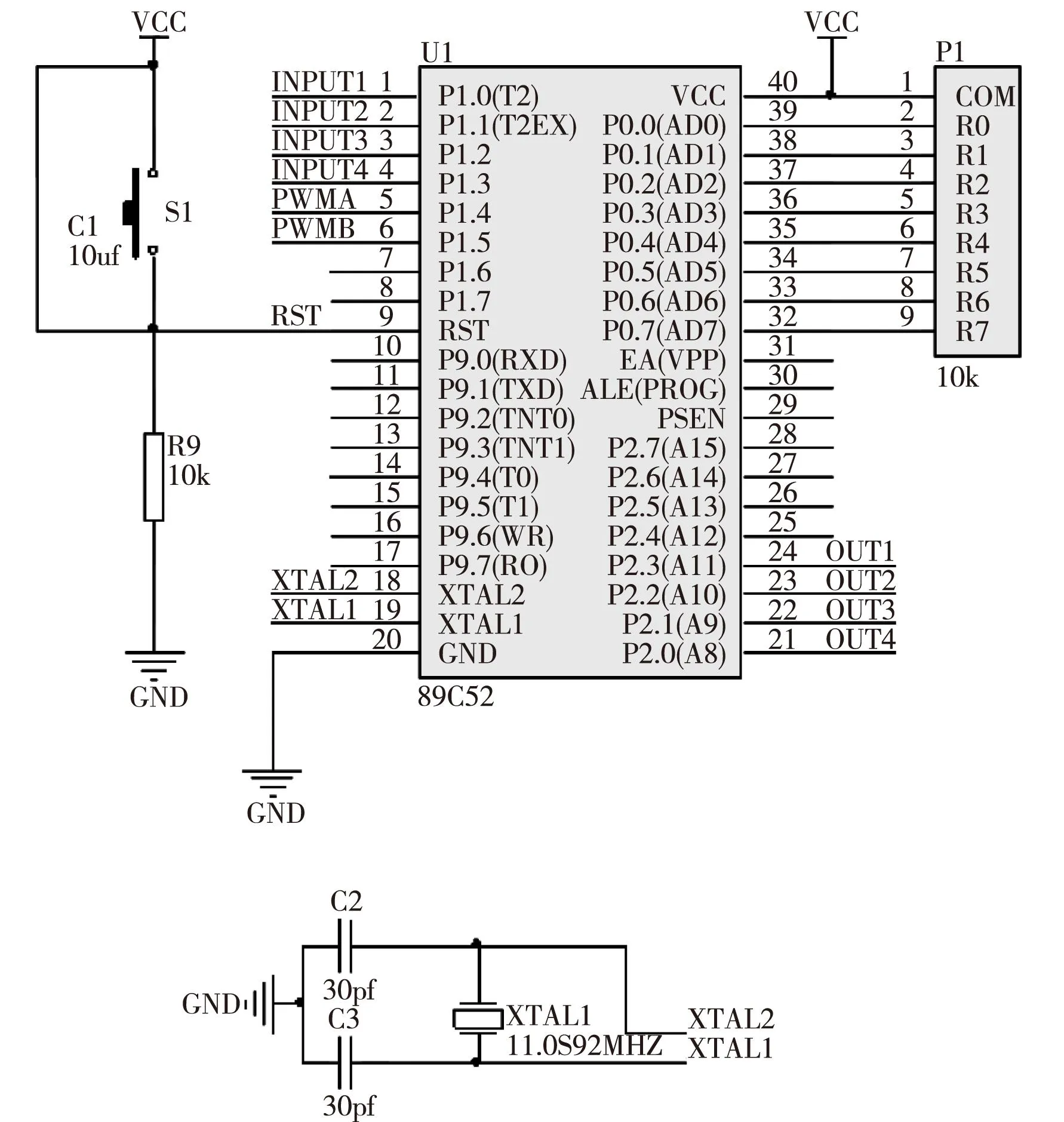
图2 单片机最小系统图
2.2电源电路的设计
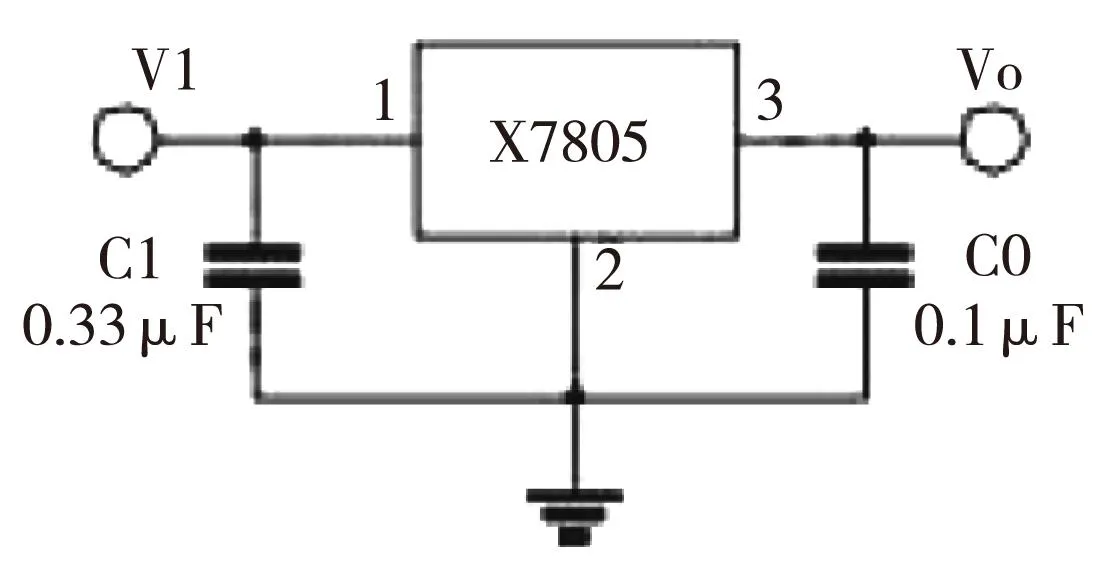
图3 三端稳压电路5 V输出
单片机需要5 V电压为其供电,本次小车设计采用12锂电池为整个小车供电,因此需要将12 V电源转换为5 V为单片机供电,经验证,选取常用的LM7805构造一个三端稳压电路可以满足单片机的供电需求[4]。
2.3电机驱动模块的设计
小车使用的是双12 V直流电机带动,由于单片机输出的信号功率很弱,无法直接带动直流电机的工作,所以我们平时在用单片机控制直流电工作时候,在实际电路中加入了电机驱动芯片提高输入直流电机的信号功率,从而能够控制电机转动。采用常见的电机驱动芯片L298N作为电机驱动。当输入信号端IN1接高电平,输入信号端IN2接低电平时,与其对应的直流电机M1则正转。反之当IN1端接低电平,IN2端接高电平时,直流电机M1反转。同理由IN2与IN3信号输入端控制的直流电机M2也是如此。驱动直流电机逻辑如图4所示。
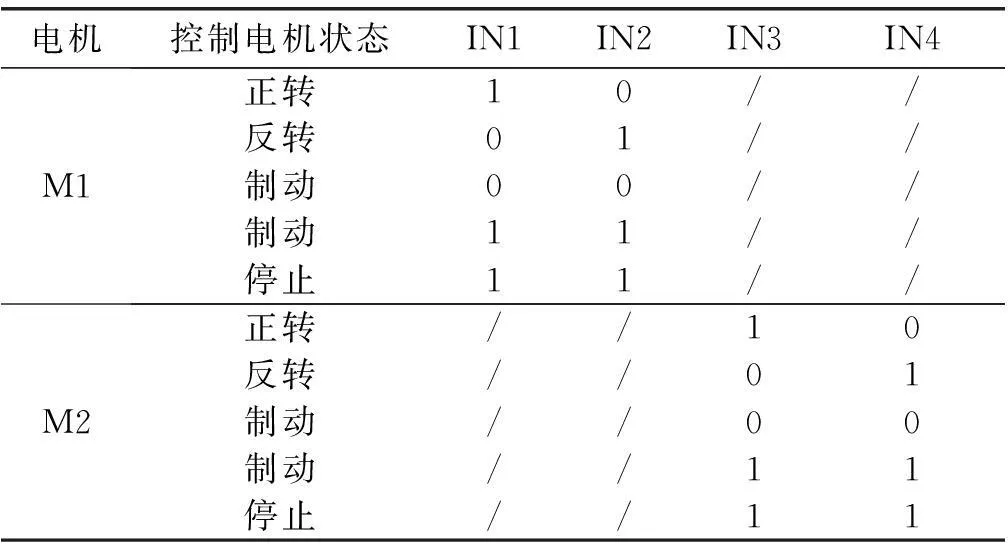
电机控制电机状态IN1IN2IN3IN4M1正转10//反转01//制动00//制动11//停止11//M2正转//10反转//01制动//00制动//11停止//11
图4驱动直流电机逻辑图
在小车循迹过程中,我们需要不断根据传感器模块循迹得到的信号进行处理,并且修正小车左右运动轨迹,这里就涉及到了小车的转向问题。当小车需要往左转时,右电机转速高于左电机;当小车需要往右转时,左电机转速高于右电机。那如何来调节直流电机的转速呢?使单片机相应I/O口输出不同占空比的PWM波形即可[5-6]。
2.4循迹模块的设计
本设计的小车的循迹原理是在地板上贴上黑色胶带,让小车沿着黑线行走。黑与白两种色调对于光线的反射系数不同,所以我们可以通过对是否接受到反射光或者反射光线的大小的强弱来判断黑线轨迹。采用四个TCRT红外光电传感器置于车前进行循迹。红外探测法,就是利用红外线在不同色调表面上的反射系数不同,通过接受反射线与否来进行探测。当红外线照射到黑线上时候,红外线被吸收,接受不到反射线,此时循迹模块输出高电平;当红外线照射在白色上面时候,反射线能够被循迹模块接收到,此时循迹模块输出低电平。当检测出黑线在车体左方时候,用单片机控制电机使车体向左修正,当检测出黑线在车体右方时候,用单片机控制电机使车体向右修正。
TCRT5000光电传感器的工作原理与一般的红外传感器一样,具有一个红外发射管和一个红外接收管,当发射管的红外线信号经过反射被接收管接收后,接收管上的电阻发生变化,在电路上一般是以电压输出表现出来,再经过电压比较器LM339等电路处理后,最终在循迹模块上以高低电平输出。电阻的变化取决于接收管接收到的红外线反射强度,因此不同的色调所反射回去的信号大小不同,从而判断黑线还是白线。
循迹模块内选用LM339作为循迹模块内的电压比较器处理反射回的红外线强度。LM339内部装有四个电压比较器,是很常见的一种电压比较器,用它可以很方便的组成各种电压比较电路和振荡电路[7-8]。
3系统软件设计
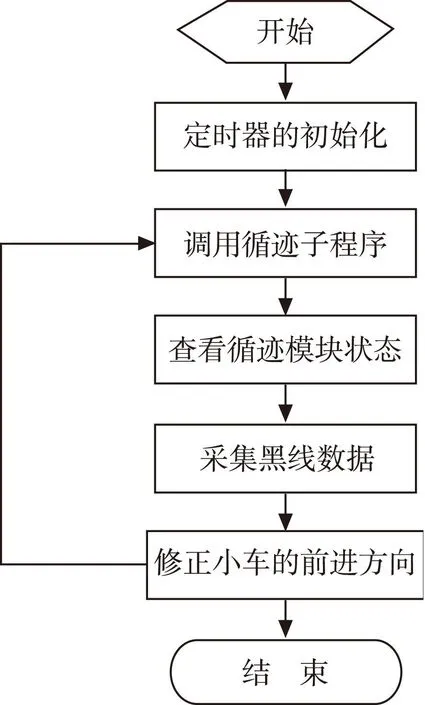
图5 系统程序流程图
根据系统硬件设计,系统使用模块化的软件设计,可以大致分为主程序、循迹模块程序以及直流电机的PWM转速控制模块这三个模块。由于设计到PWM转速控制,并且此次PWM控制采用定时器0改变输出信号占空比实现,所以主程序一开始需要对定时器和中断程序初始化,之后设定单片机控制直流电机正转向前移动。然后开始循环调动循迹模块子程序,不断扫描循迹模块传来的黑线信号,再根据采集到的数据修正小车的移动方向[9]。系统流程图如图5所示。
3.1PWM脉宽调制子程序
直流电机的调速通常采用PWM脉宽调制,即用PWM矩形波控制L298N的使能端的开关来达到调速的目的。用定时器0方式1产生中断程序实现PWM的占空比调节。
3.2循迹模块子程序
设计采用4路红外循迹,将TCRT5000红外探头安置于车体前方。检测黑线的方位,经过多次试验调试最终决定将小车转向分为五种情况,直线前进、左小拐、左大拐、右小拐、右大拐。直线前进时候两电机取PWM的占空比80%;左小拐时候取左电机占空比5%,右电机占空比65%;左大拐时候取左电机占空比5%,右电机占空比85%;右小拐时候取左电机占空比65%,右电机占空比5%;右小拐时候取左电机占空比85%,右电机占空比5%。
4结论
本设计采用AT89C52单片机作为控制芯片,红外光电对管及电压比较器LM339作为循迹模块传感器、L298N及直流电机作为驱动模块,以实验组装小车为基础。小车设计模块构造简单,软硬件运行稳定,同时还保留多个I/O口,可以在循迹小车的基础上,拓展更多的功能,比如避障控制、声控循迹等等多种功能。循迹机器人现如今在各个领域应用广泛,如探测、军事、航空等领域。循迹机器人作为一种智能的高新技术,其发展,为人类带来了许多的方便。它可以适应不同环境、温度等条件的工作空间,代替人类完成各种任务,保障了人的安全、也使得任务能够更加精准、高效率的完成。
参考文献
[1]张兴业.汽车电子信息技术状况和发展对策[J].汽车实用技术,2004(02)
[2]安岩.自动循迹智能小车的设计论文[J].苏州科技学院学报,2004(04)
[3]郭亮.基于单片机的新型智能小车研制设计论文[D].四川:西南交通大学社,2003.9
[4]鲜浩等.单片机原理及工程设计方法[M]. 国防工业出版社, 2012
[5]王广雄.控制系统设计[M].北京:宇航出版社,1986
[6]王晓明.电动机的单片机控制[M].北京:北京航空航天大学出版社,2002
[7]刘笃仁,韩保君.传感器原理及应用技术[M].北京:机械工业出版社,2003
[8]高月华.基于红外光电传感器的智能车自动寻迹系统设计[J].半导体光电, 2009(01)
[9]郭天祥.新概念51单片机C语言教程[M]. 电子工业出版社,2009
张文莉(1989-),女,贵州大学电气工程学院控制理论与控制工程专业硕士研究生。
于婷(1989-),女,本科,长春轨道客车装备有限责任公司国凯公司技术部制造工程师。
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
少年文艺·我爱写作文(2020年11期)2020-11-23 01:52:52
电子测试(2018年15期)2018-09-26 06:01:14
饮食与健康·下旬刊(2017年12期)2017-12-06 17:53:41
电子制作(2017年1期)2017-05-17 03:54:20
电子制作(2017年1期)2017-05-17 03:54:12
电子制作(2016年11期)2016-11-07 08:43:49
初中生之友·中旬刊(2015年10期)2015-11-03 00:08:50
淮南师范学院学报(2015年3期)2015-03-22 01:16:17