基于机载LiDAR数据的建筑物轮廓规则化方法
2016-01-12 08:34:02张阳阳,门林杰,李向伟
测绘工程 2015年10期
基于机载LiDAR数据的建筑物轮廓规则化方法
张阳阳1,门林杰2,李向伟3
(1.甘肃农业大学 资源与环境学院,甘肃 兰州 730070;2.甘肃省国土资源规划研究院,甘肃 兰州 730070;3.山东省煤田地质局物探测量队,山东 泰安 271021)
摘要:在点云数据分类和建筑物轮廓提取的基础上,提出一种基于最小外包矩形的建筑物轮廓规则化方法。以任意两相邻轮廓点构建初始外包矩形,以迭代的方式将内点数最多者作为最终外包矩形,继而以面积比率、距离和均方根作为指标对规则化结果给出评判,最后以实际数据进行实验。实验结果表明,文中提出的方法能够有效对分类后的建筑物轮廓点进行规则化。
关键词:机载激光三维扫描;建筑物;轮廓线;规则化
中图分类号:P234
收稿日期:2014-09-01;修回日期:2015-01-12
作者简介:张阳阳(1987-),女,硕士.
BuildingregularizationbasedonairborneLiDARpointclouds
ZHANGYang-yang1,MEN Lin-jie2,LI Xiang-wei3
(1.CollegeofResourcesandEnvironmentalSciences,GansuAgriculturalUniversity,Lanzhou730070,China;2.GansuInstituteofLandandResourcesPlanningandResearch,Lanzhou730070,China;3.GeophysicalProspectingandSurveyingTeam,ShandongBureauofCoalGeologicalExploration,Taian271021,China)
Abstract:Based on the classification of point cloud and extraction of building boundary,a regularization method for building boundary based on Minimum Bounding Rectangle(MBR) is put forward.First the initial bounding rectangle is constructed by two arbitrary adjacent contour points, of which the optimal one obtaining the most consistent contour points is determined by an iterative manner,and then the results are evaluated by two criterions:area ratio and RMS of the distance between contour points and its corresponding rectangle side. Finally a sample data is taken as an example to carry out the experiment.The results show the method proposed can regularize the contour points effectively.
Keywords:LiDAR;building;contour;regularization

机载激光三维扫描(LightDetectionAndRanging,LiDAR)技术集成了激光测距系统、全球定位系统和惯性导航系统,它能够快速获取地球表面三维空间信息,具有效率高、高程精度高、成本低等特点[1],广泛应用于三维数码城市[2]、城市规划[3]、灾害评估[4]等领域。建筑物作为人类活动和人类文明的重要载体,是当前多个学科研究的焦点。目前,快速、精确获取建筑物信息在城市规划、导航、灾害评估等领域具有重要作用。利用机载LiDAR技术进行建筑物提取和重建是目前测绘遥感领域研究的热点和难点[5]。
本文假设机载LiDAR点云数据经过滤波和分类的过程,获得建筑物点云数据作为已知数据。由于分辨率等因素,直接从分类后的建筑物点云数据提取轮廓并不准确,鉴于城区现代建筑物相邻轮廓边界具有正交这一特性和为了进一步的抽象化表达的需要,本文提出一种基于最小外包矩形探测的建筑物轮廓点规则化方法。
1方法
1.1 建筑物轮廓点提取
关于建筑物点云轮廓提取方法,主要有:基于点云栅格化的方法[6]、基于AlphaShape[7]的方法等。前者在对离散点云数据栅格化的基础上,根据高程将离散点转化为距离影像,利用图像处理的相关理论方法对距离影像进行边界提取,获得建筑物轮廓信息。该方法需要将离散点转换为规则格网,容易造成数据损失、精度降低;后者判定某点是否为边界点,且计算量大,效率低。
在各建筑物数据中,将点云数据投影至XOY平面,以二倍平均点间距确定格网间距,对点云数据进行格网划分。在边界格网单元内部,逐点搜索确定边界轮廓点:对于某待定点p0,其在XOY平面的投影如图1所示,计算p0点至各邻域点的方位,并将该方位按大小进行排序,计算相邻两方位间的方位差,若差值大于阈值tha,则该待定点p0为轮廓点,否则为内部点。在图2中,图2(a)所示为所选取的样例区域影像数据,图2(b)为分类后的建筑物点云数据,图2(c)为按照本文方法确定的建筑物轮廓点数据。
1.2 轮廓点规则化方法
在单一建筑物内,针对上述步骤获取的建筑物轮廓点,提出以下迭代的方法对其进行规则化处理。
1)对于该建筑物中某轮廓点,除去最近点确定直线方向,以该方向作为矩形的一个方向,与该方向垂直的方向作为矩形的另一边,并以该点为原点,建立坐标系,如图3所示。并将该建筑物轮廓点投影至该局部坐标系的两坐标轴,以其在两坐标轴的数据区间长度作为矩形的长和宽;

图3 建筑物轮廓点提取效果
2)根据点密度设定距离阈值thd,确定在该阈值范围内的建筑物轮廓点数目,记录点数;
3)对于建筑物内各轮廓点,循环以上过程,以对应轮廓点数最多的矩形模型作为该建筑物的第一层外接矩形模型。
图4展示某建筑物规划的过程。图4(a)为某建筑物的影像图与边界点叠加效果图。图4(b)为采用上述方法探测到的最小外包矩形,从结果上看,算法探测到的矩形只是建筑物的一种粗略表达。在上述过程获取的矩形作为建筑物的第一层级最小外包矩形,将剩余边界点聚类后投影至该层级矩形,如图4(c)所示,并计算投影后在矩形两个方向上的长度,若长度大于阈值(为平均点间距二倍),则根据对应区域确定第二层级的最小外包矩形,第二层级可存在多个最小外包矩形,如图4(d)所示。若长度小于阈值,则不对该聚类结点确定最小外包矩形。将上述过程迭代执行至无剩余轮廓点或轮廓点投影后距离小于阈值,如图4(e)所示。
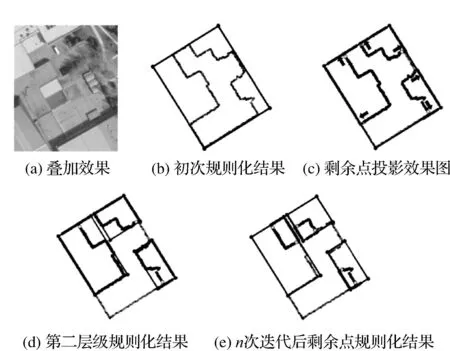
图4 建筑物轮廓点提取效果
对于探测到的各层级最小外包矩形,本文对上下两层级矩形外包矩形执行逻辑减运算
(1)
式中:k为当前层级,n为最大层级。在实际中,即使是非常复杂的建筑,层级一般不会超过5。
1.3 规则化结果评估
并非所有的建筑物都由简单规则矩形组成,另外考虑到建筑物分类时的误差,上述算法并不适合所有情况。如图5(a)所示为不规则建筑物的最小外包矩形规则化结果。对上述规则化结果进行评估,本文给出两项量化评判标准。
1)以边界点所围成区域的面积与矩形区域面积做比对,其中边界点围成区域面积按式(3)计算。相似性接近于1则表示规则化结果高度逼近边界点所围成的区域;
(2)
(3)
2)上述标准并不能鉴定所有结果,如图5(b)所示,虽然规则化前后面积近似相等,但是,规则化的最小外包矩形并没有表达其真实结果。在上述标准基础上,以边界点到规则化后的最小外包矩形的最近距离均方根作为评判标准。
(4)
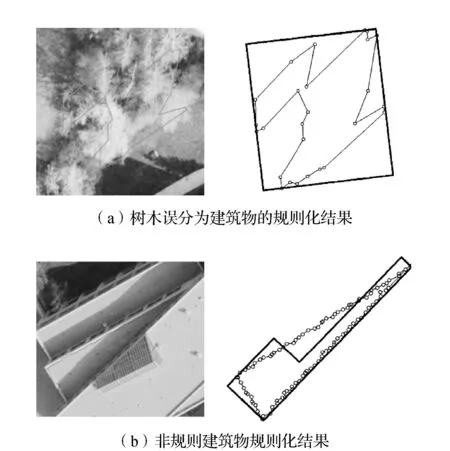
图5 建筑物规则化结果图
2实验
为验证本文方法的性能,选取了ISPRS官网提供的样例数据作为试验数据,该数据区域为德国斯图加特地区,数据采用LeicaALS50系统进行采集,飞行高度平均为500m,平均点密度为6.5pt/m2,数据区域均为居民地,建筑物特征丰富,如图6(a)所示。算法首先在分类后的建筑物数据集中探测轮廓点。首先将数据集投影至XOY平面,并对数据集进行网格划分。邻域搜索中k值为20,最大夹角大于90,即当前点为轮廓点,该数据实验区域轮廓点探测结果如图6(b)所示。根据本文所提的迭代最小外包矩形算法对轮廓点规则化,在该过程
中,采用AreaBoundary和RMSDist对结果进行约束,规则前后面积比率大于0.6,RMSDist值小于2倍平均点间距则视当前建筑物可由简单矩形规则化,结果如图6(c)所示。
3结束语
机载激光三维扫描技术能够快速获取地面建筑物信息。从实验过程可以看到,本文提出的基于迭代最小包围矩形的方法能够将绝大部分规则建筑物的轮廓规则化,该方法适应性强、准确性高。
参考文献:
[1]张小红.机载激光扫描测高数据滤波及地物提取[D].武汉:武汉大学,2002.
[2]尚青波.激光LiDAR数据在三维城市模型中的应用[J].科技情报开发与经济,2010,20(17):137-139.
[3]李勇,黄金浪.利用LiDAR数据测制城市大比例尺地形图的研究与实践[J].城市勘测,2010(2):94-95.
[4]余烨,刘晓平,袁晓辉,等.面向洪水灾害评估的城市建模与仿真[J].系统仿真学报,2010,22(9):2136-2140.
[5]杨娜,秦志远,晏耀华,等.面向地面点识别的机载LiDAR点云分割方法研究[J].测绘工程,2014,23(10):18-22.
[6]刘春,李楠,吴航彬,等.基于LIDAR数据的建筑物轮廓提取[J].测绘科学,2012,40(9):1399-1405.
[7]EDELSBRUNNER H,KIRKPATRICK D,SEIDEL R.On the shapes of a set of points in the plane[J].IEEE Transactions on Information Theory,1983,29(4):551-559.
[责任编辑:李铭娜]
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21 05:33:36
理论探索(2021年6期)2021-05-26 17:06:22
化工设计通讯(2020年4期)2020-05-15 10:15:42
中国教育信息化(2019年22期)2019-12-20 07:31:26
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:18
石油地质与工程(2019年4期)2019-09-10 08:22:44
电脑知识与技术(2018年24期)2018-11-26 09:33:32
娃娃乐园·3-7岁综合智能(2016年1期)2016-10-25 09:32:48
小天使·二年级语数英综合(2015年12期)2015-12-04 16:36:12
计算机工程与科学(2015年1期)2015-03-27 07:06:17