三维激光扫描点云混合像素的自动识别方法
2016-01-12 08:32:53林欢,王成硕,王娟
测绘工程 2015年10期
关键词:三维激光扫描
三维激光扫描点云混合像素的自动识别方法
林欢1,王成硕2,王娟3
(1.河海大学 地球科学与工程学院,江苏 南京 210098;2.恒大地产集团沈阳公司,辽宁 鞍山 114000;3.江苏兴安电力实业有限公司,江苏 南京 210000)
摘要:混合像素的存在会给点云后续处理与应用带来干扰,针对如何在原始扫描点云中自动识别混合像素的问题,从扫描仪的工作原理着手分析了混合像素的形成条件,结合扫描仪的内部光电转换机制与真实扫描数据论证混合像素的测距误差分布规律,据此设计混合像素的自动探测方法。利用真实原始扫描数据进行实验,结果证明,文中方法能够准确地识别出点云中的混合像素。
关键词:三维激光扫描;三角构网;深度差;混合像素;点云密度
中图分类号:TP391.41
收稿日期:2014-08-18
基金项目:国家自然科学基金资助项目(41201439)
作者简介:林欢(1990-),男,硕士研究生.
Anautomaticmethodofrecognizingmixedpixelsin3Dlaserscanningpointcloud
LINHuan1,WANG Cheng-shuo2,WANG Juan3
(1.SchoolofEarthScienceandEngineering,HohaiUniversity,Nanjing210098,China;2.EvergrandRealEstateGroupLtd.,Anshan114000,China;3.JiangsuXinganElectricPowerIndustrialCo.,Ltd.,Nanjing210098,China)
Abstract:The existence of mixed pixels will bring interference to the following processing and application of the point cloud.Aiming at the problem of recognizing mixed pixels automatically in the original scanning point cloud,it analyzes the formation conditions of the mixed pixels, by verifying the mixed pixel’s ranging error distribution based on the scanner's internal photoelectric conversion mechanism and the real scanning data.Furthermore,an automatic method is designed on the basis of former analysis.The experiment results show the mixed pixels can be recognized accurately.
Keywords:3Dlaserscanning;triangulation;depthdifference;mixedpixel;pointclouddensity

三维激光扫描技术作为一种新的测量和感知技术,因其获取数据的速度快、得到的点云模型精度高,正被越来越广泛应用。利用三维激光扫描,不仅能获得高精度的三维点云模型,而且能根据不同需求在点云模型上提取想要的信息[1]。由于三维激光扫描仪是根据激光在扫描仪与目标表面之间的飞行时间来推算沿激光光束方向上目标表面到扫描仪之间的距离,所以当激光光斑正好落物体边缘上时,同一束激光会在不同景深的物体表面形成两束反射激光,从而造成三维激光扫描仪的测距错误,形成混合像素。混合像素的存在会对后期点云处理(三维重构、物体表面分割等)工作带来较大影响,因此设计一个能自动识别并滤除混合像素的算法是有必要的。
混合像素不仅普遍存在于激光扫描点云中,而且普遍存在于遥感图像中。遥感图像领域一般对图像中的混合像素进行分解处理,例如游晓斌提出了一种通过重采样对图像中混合像元的分解方法[2]。崔雨勇提出基于图像边界的混合像素分解方法,首先对图像进行边缘提取,对非边界图像进行分类,再对边界进行混合像元分解[3]。另外,在激光扫描点云方面对于混合像素的研究中,混合像素一般被视为噪声而滤除。例如张洪栋等人利用相邻点之间的距离关系,设计出了一种规则混合像素的提取方法,并对提取出的混合像素进行校正,保证了数据的完整性[4]。本文在上述方法基础上研究并提出了一套混合像素的自动识别算法:在混合像素的测距异常的基础上利用深度差统计初步识别混合像素,并利用密度统计的方法进一步确定混合像素,最后通过实验验证了算法的有效性。
1混合像素的产生机理及特性
1.1 产生机理
激光扫描发射的光束成锥形形状发散,当它投射到物体表面时会产生光斑,并且扫描距离越远,激光斑点越大。当激光光束遇到物体边缘时,部分光束会投射到前景物体边缘,另外一部分光束会投射到背景物体上,这时就会产生混合像素[5],如图1 所示。测量的实际距离会位于前景物体边缘与背景物体之间,所以前、背景之间会多出一个孤立点(即混合像素),产生这种现象的原因在于三维激光扫描仪内部的传感器在接收信号能量时一部分会用来校正距离信息,虽然这种校正方法可以提高部分数据的精度,但促使了混合像素的产生。

图1 混合像素产生示意图

图2 带有混合像素的球标靶点云
1.2 混合像素特性
图2所示为利用三维激光扫描仪扫描地面上球标靶得到的点云,图中可以发现球标靶背后面有许多孤立、零散的混合像素,这些混合像素无规律地分布于球标靶(前景)和地面(背景)之间。根据对实际点云的分析,混合像素主要有如下两个特性:①测距异常特性,由于三维激光扫描仪是按照倒“Z”字形的顺序扫描,混合像素的大部分扫描邻近点都在扫描物体前表面和后表面;②密度异常特性,混合像素处的点密度相对整体点云密度小很多。
2混合像素的自动探测方法
2.1 基于球面投影的三维点云三角构网
基于上述分析出的混合像素的特性,本文设计了基于邻近点深度差的方法来初步识别混乱点云中的混合像素,再利用点云密度统计方法加以约束达到精确提取混合像素的目的。首先采用了张帆提出的基于球面投影的单站地面激光扫描点云构网方法来构建点云拓扑[6]。利用中心投影将单测站点云投影到以测站中心为球心的球面上,然后根据球面投影点的水平、竖直角实施扫描点的构网,从而完成单测站三维点云在欧氏空间下的三角构网[7]。三角构网后,混合像素的测距异常特性更加直观地体现在其与邻近点的深度差比较大的特点上。如图3所示,经过三角构网后可以求出混合像素P0的邻近点为P1~P8,点P0与其邻近点有较大的深度差。
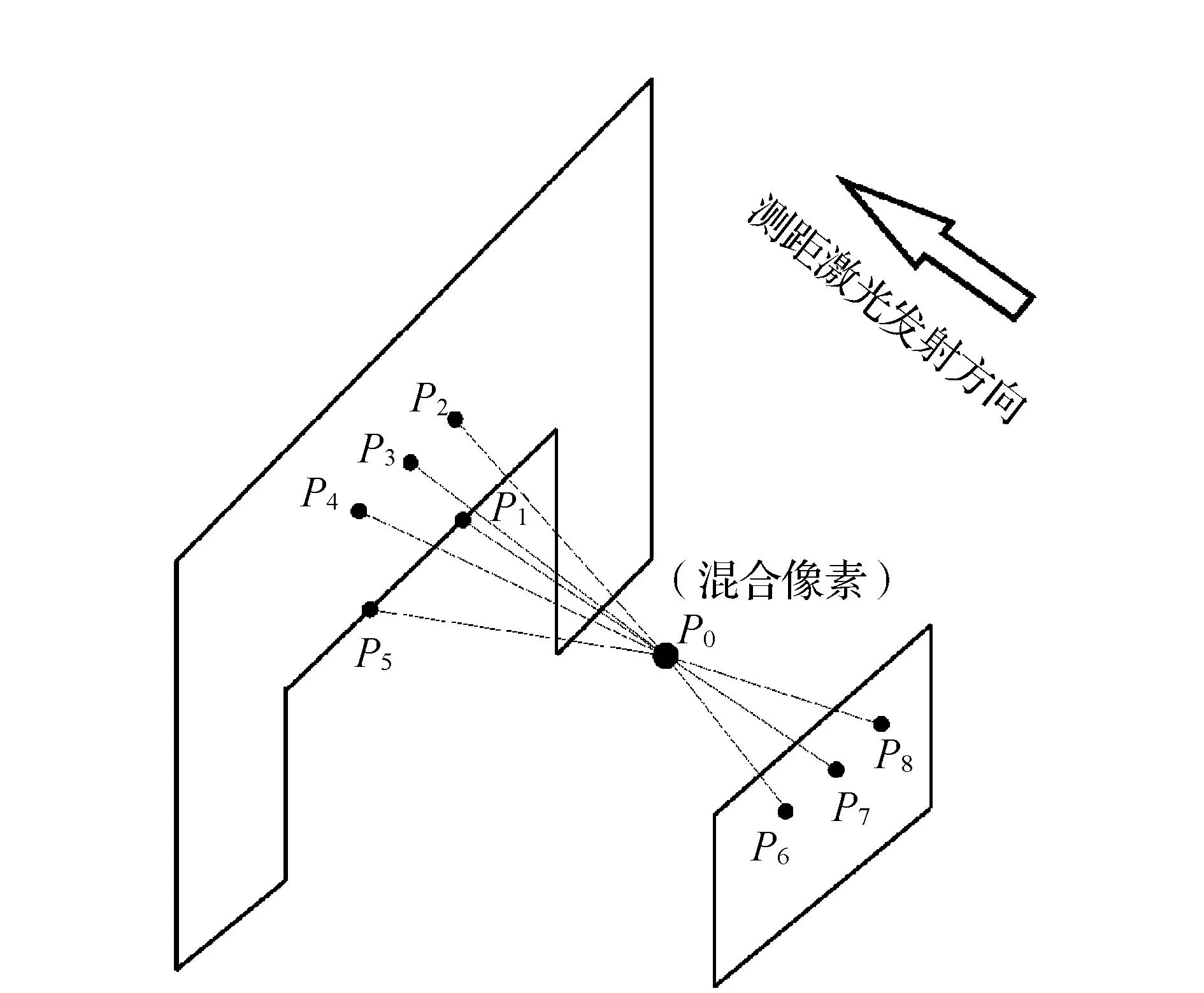
图3 混合像素拓扑示意图
2.2 基于深度差的混合像素初步识别
借助混合像素的测距异常特性,即混合像素与其邻近点具有较大的深度差,本文设计了初步识别混合像素的算法。首先计算每个点与其邻近点的深度值之差,然后利用统计方法选择出合适的阈值,最后根据阈值识别混合像素。
(1)
(2)


图4 平均深度差统计
2.3 基于点云密度的混合像素精确识别
对于连续密集采样的点云,理论上点云各处的密度相差不大。但混合像素特殊的产生机制使得其点云密度较正常扫描点存在明显差异,如图2所示点云中的混合像素零散分布于前背景和后背景之间,其所在位置的点云密度不仅比整体点云小很多,而且比阶跃边缘点也小很多。基于混合像素的密度异常特性,本文通过统计点云的密度来区分初步识别点集中的阶跃边缘点和混合像素,以达到精确提取混合像素的目的。
点云中任意点位置的点云密度可以用距离该点一定距离内的邻近点的数量来表示,邻近点越少表明其点云密度越小,是混合像素的可能性越大。基于上述分析,本文利用kd-tree的邻域搜索来估算点云密度,以此进一步区分混合像素和阶跃边缘点。利用kd-tree本文设计了区别阶跃边缘点和混合像素的算法。
1)对点云建立kd-tree索引;
2)设计距离阈值S,并以此计算初步识别出的混合像素(包含了阶跃边缘点和混合像素)的邻近点个数;
3)设计个数阈值K区别其中的阶跃边缘点和混合像素,邻近点个数超过阈值的认定为阶跃边缘点,小于阈值的则认定为混合像素。
在上述算法中,关于距离阈值S的设计本文采取的是随机选取点云中1 000个点,并根据已建立的三角网计算出包含该1 000点的所有三角边长度的平均值S,以S作为距离阈值。个数阈值K的设计相对简单,实验发现一般K值设为5即可以较好地区别阶跃边缘点和混合像素。K值大小的设计可以根据原始点云数据的密度做适当调整,总的来
说只要加入简单的人工干预即可设计出合适的K值。图6所示为利用上述方法进一步识别出的混合像素,通过观察可以发现混合像素与阶跃边缘点被很好地区分开。将原始点云中识别出的混合像素剔除后得到了图7,通过对比原始点云可以发现本文设计的混合像素识别算法的有效性。

图6 精确提取的混合像素

图7 剔除了混合像素的球标靶点云
3实验结果与分析
本文利用VC++联合OpenGL编程实现了混合像素识别算法并应用于实际扫描点云,本文中的点云数据均由美国天宝公司生产的Trimble GX200扫描而成。图8(a)所示为一球形目标的扫描点云,从图中可以明显发现墙和球标靶之间多了许多混合像素,混合像素的存在使得拟合之后的目标球心严重偏离物体实际中心,并且拟合之后的球陷入了墙面,这与实际是不符的,如图8(b)所示。利用本文提出算法可以有效地剔除点云中的混合像素如图8(c)所示,再次拟合后可以发现该球标靶点云的拟合结果更贴近实际,如图8(d)所示。另外通过观察可以发现由于混合像素的影响,目标拟合之后的半径与物体实际直径存在较大的差值,原始点云(包含大量混合像素)拟合得到的球半径明显小于实际球标靶半径,而剔除了混合像素的点云拟合得到的球与实际球标靶点云更加贴合。图9(b)为一个含有6个球目标的原始三维激光扫描点云,一共包含10 134个点,图9(a)为对应现场数码影像,图9(c)为原始点云的侧视图。利用本文算法提取出原始点云中的混合像素如图9(d)所示,图中文字代表对应球目标所在的位置,图中一共包含127个点,经分析其中122个点属于混合像素,5个属于随机噪声点,其中图中矩形框内的点即误识别为混合像素的随机噪声点。上述实验证明了本文提出的算法在识别混合像素的有效性,剔除混合像素一定程度提高了后续点云建模的精度,而且本文算法理论上对于大场景大数据点云数据也适用。

图8 球标靶实验
4结束语
混合像素普遍存在于三维激光扫描点云中,而且关于该问题的研究还不够成熟,所以本文在分析混合像素产生机理的基础上,提出了地面三维激光扫描数据中混合像素的自动探测和剔除算法,并在
C++软件平台上实现。通过实验结果可知,该方法能有效识别激光点云中的混合像素,可以为后续点云处理提供更为精确的数据。本文提出的混合像素自动探测算法是建立在密集采样点云的基础上,如果采集的点云分布不均时可能会影响到混合像素的探测,也是进一步的研究方向。
参考文献:
[1]赫春晓,李浩.基于三维激光扫描数据的三维实景构建[J].测绘工程,2013,22(1):81-85.
[2]游晓斌,游先祥,相莹莹.混合像元及混合像元分析[J].北京林业大学学报,2003,25(S1):28-32.
[3]崔雨勇,曾致远,付必涛,等.基于边界提取的混合像元分解[J].人民长江,2008,39(8):115-117.
[4]杨鑫,付梦印,杨毅,等.一种激光点云规则混合像素的提取与校正方法[C].//第九届全国光电技术学术交流会论文集.2010:205-208.
[5]TULEY J,VANDAPEL N, HEBERT M.Analysis and Removal of Artifacts in 3-D LADAR Data[C]//in IEEE International Conference on Robotics and Automation,2005.
[6]张帆,黄先锋,李德仁.基于球面投影的单站地面激光扫描点云构网方法[J].测绘学报,2009,38(1):48-54.
[7]郑德华,庞逸群,曹操.基于椭球面投影的散乱点云建立三角格网方法[J].测绘工程,2010,19(4):19-23.
[8]刘艳丰.基于 kd-tree 的点云数据空间管理理论与方法[D].长沙:中南大学,2009.春晓,李浩.基于三维激光扫描数据的三维实景构建[J].测绘工程,2013,22(1):81-85.
[2]游晓斌,游先祥,相莹莹.混合像元及混合像元分析[J].北京林业大学学报,2003,25(S1):28-32.
[3]崔雨勇,曾致远,付必涛,等.基于边界提取的混合像元分解[J].人民长江,2008,39(8):115-117.
[4]杨鑫,付梦印,杨毅,等.一种激光点云规则混合像素的提取与校正方法[C].//第九届全国光电技术学术交流会论文集.2010:205-208.
[5]TULEY J,VANDAPEL N, HEBERT M.Analysis and Removal of Artifacts in 3-D LADAR Data[C]//in IEEE International Conference on Robotics and Automation,2005.
[6]张帆,黄先锋,李德仁.基于球面投影的单站地面激光扫描点云构网方法[J].测绘学报,2009,38(1):48-54.
[7]郑德华,庞逸群,曹操.基于椭球面投影的散乱点云建立三角格网方法[J].测绘工程,2010,19(4):19-23.
[8]刘艳丰.基于 kd-tree 的点云数据空间管理理论与方法[D].长沙:中南大学,2009.

[责任编辑:刘文霞]
猜你喜欢
中小企业管理与科技·中旬刊(2017年12期)2018-01-16 15:50:55
南水北调与水利科技(2017年6期)2018-01-09 00:28:44
科技视界(2017年16期)2017-11-11 09:12:30
科技创新与应用(2017年32期)2017-11-06 16:17:40
海峡科技与产业(2017年8期)2017-09-06 00:34:45
农家科技中旬版(2017年7期)2017-08-15 12:14:49
智能计算机与应用(2017年3期)2017-07-15 14:01:19
农家科技中旬版(2017年5期)2017-07-14 08:38:27
中国科技纵横(2017年3期)2017-03-29 16:01:41
科技视界(2016年4期)2016-02-22 12:45:32