大型上部模块运动响应短期预报
2016-01-10 06:04:10李春辉吴晓源
海洋工程装备与技术 2016年1期
尹 艳,李春辉,吴晓源,王 超
(1.上海外高桥造船有限公司,上海 200137;2.中国船舶工业集团,上海 200137)
大型上部模块运动响应短期预报
尹 艳1,李春辉1,吴晓源2,王 超1
(1.上海外高桥造船有限公司,上海 200137;2.中国船舶工业集团,上海 200137)
基于三维势流理论,利用水动力分析软件SESAM对半潜驳船和半潜式生产平台大型上部模块组成的系统在零航速时波浪作用下的运动响应特性进行了研究。结合作业海域的海况条件,采用谱分析方法对该系统在不规则波中的短期响应值进行了预报,为确保大型上部模块运输过程的安全性和可靠性提供一定的理论依据。
大型上部模块;半潜驳船;运动响应;短期响应预报
0 引 言
随着海洋油气开发的推进,海上平台逐渐向大型化、综合化的方向发展,平台上部甲板结构的重量和尺寸也不断增大,使得上部结构的安装越来越具有挑战性。起源于20世纪90年代初的浮托安装法具有安装速度快、海上调试时间短等优势,得到迅速的发展,目前广泛应用于海洋平台上部模块的整体安装[1]。在某项目中,目标半潜式生产平台上部模块重量约为32 000 t,在使用半潜驳船进行运输时,受到波浪载荷的影响,整体的运动响应较大。考虑到模块运输过程的安全性和可靠性[2],有必要研究该上部模块在波浪作用下的运动响应特性。
本文以半潜驳船和半潜式生产平台大型上部模块组成的系统为研究对象,采用SESAM软件对整个系统在零航速时不规则波中的运动响应和短期响应预报进行分析研究。
1 理论分析
1.1 载荷与运动响应传递函数
针对驳船和上部模块组成的系统运动与载荷的谱分析、短期预报和长期预报,提出如下假设:(1)驳船和上部模块为时间恒定的线性系统;(2)波浪运动和驳船与上部模块组成的系统运动是平稳的各态历经随机过程;(3)波浪频谱和驳船与上部模块组成的系统响应均为窄带谱[3]。
驳船和上部模块组成的线性系统的水动力载荷响应谱为[4]
(1)
式中:SY(ω)为响应谱密度函数;Sw(ω)为波浪谱密度函数;HY(ω)为传递函数RAO;|HY(ω)|为响应幅值。
1.2 短期预报
短期海况波浪幅值及波浪诱导载荷幅值符合Rayleigh分布[5]。相应的概率密度函数为
(2)
该分布只有方差σ2一个参数,可由响应谱按下式直接得到:
(3)
式中:m0为响应谱的零阶矩。
由此可获得整个系统运动短期预报的各种统计值,包括均值、有义值等。其中,单幅有义值的表达式为
(4)
此外,可进一步求得短期响应的最大值。短期响应最大值与有义值的关系为
(5)
式中:n为该变量的短期循环次数,当预报时间为3 h时,其表达式为
(6)
式中:m2为响应谱的二阶矩。
2 研究方案
2.1 坐标系选取
水动力计算坐标系原点设在驳船的艉垂线、基线和中纵剖面的交点,x轴向船艏为正,y轴左舷为正,z轴垂直向上为正。该坐标系用于定义湿表面模型和质量模型。浪向如图1所示,波浪从船艉向船艏为0°,从右舷向左舷为90°。驳船主要有6种运动形式,即纵荡、横荡、垂荡、横摇、纵摇和艏摇[6]。
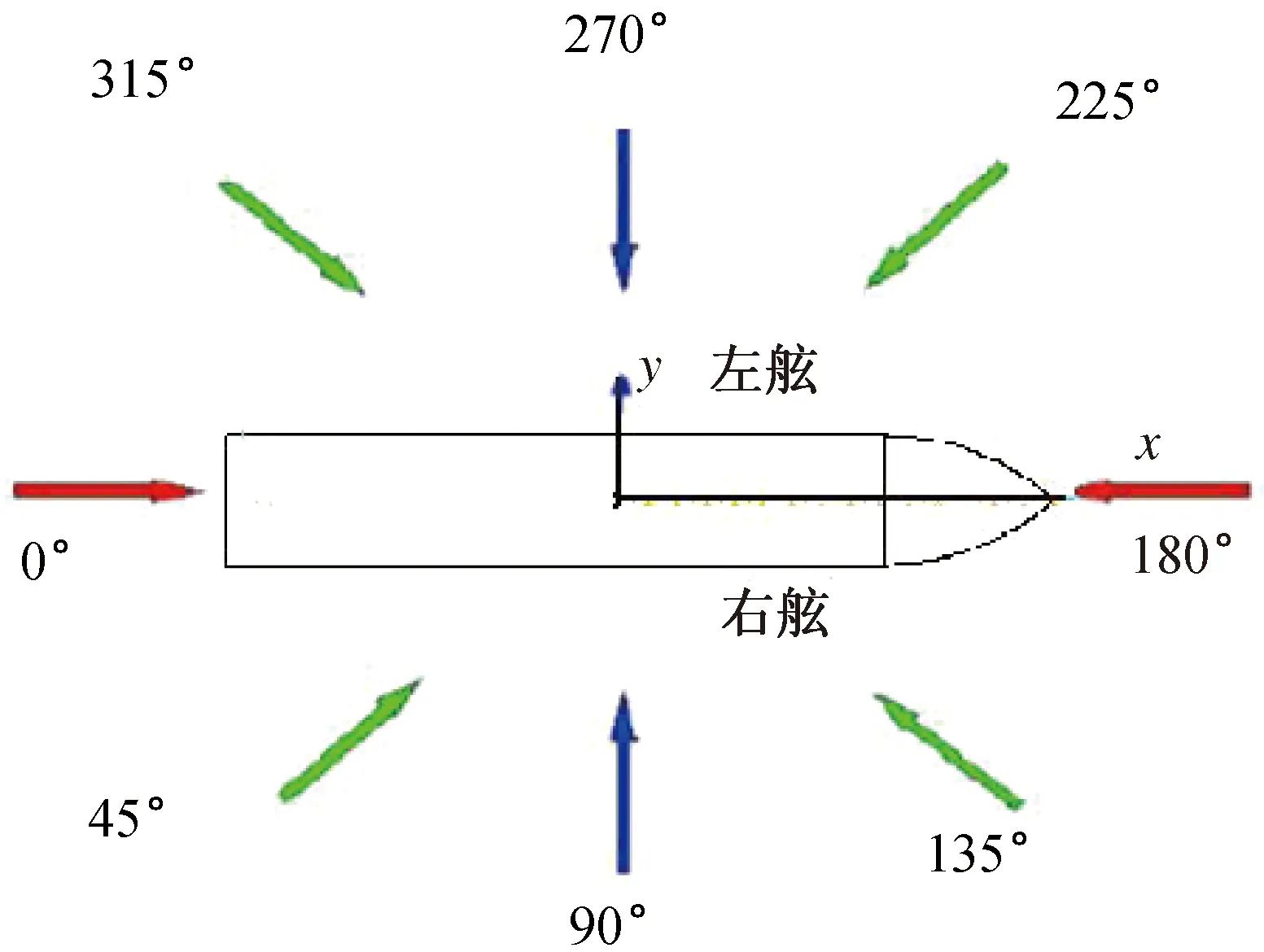
图1 水动力计算坐标系定义Fig.1 Coordinate system
2.2 有限元模型
半潜式生产平台上部模块是由主甲板以及下沉甲板组成的主体桁架结构,主要型材属性为方钢和工字钢,总长为92 m,总宽为92 m,总重约32 000 t。根据上部模块整体重量选取50 000吨级的“海洋石油278”半潜驳船,其型线图如图2所示。上部模块和驳船有限元模型如图3和图4所示。

图2 驳船型线图Fig.2 Barge lines plan
2.3 上部模块布置方式
在半潜式生产平台上部模块上驳船之前,先将上部模块整体运至码头,在上海外高桥造船有限公司现有硬件资源条件下,采用滑道移运的方式进行滑移。有两种方式将上部模块移运至驳船处:一种是从艏艉方向,另一种从舷侧方向。但如果采用第二种方案,将使上部模块不能对称布置在滑道上,会导致滑道受力不均,移运时不利于保证上部模块的结构强度,因此采用上部模块沿艏艉方向移向驳船的方案。驳船与上部模块组成的系统如图5所示。
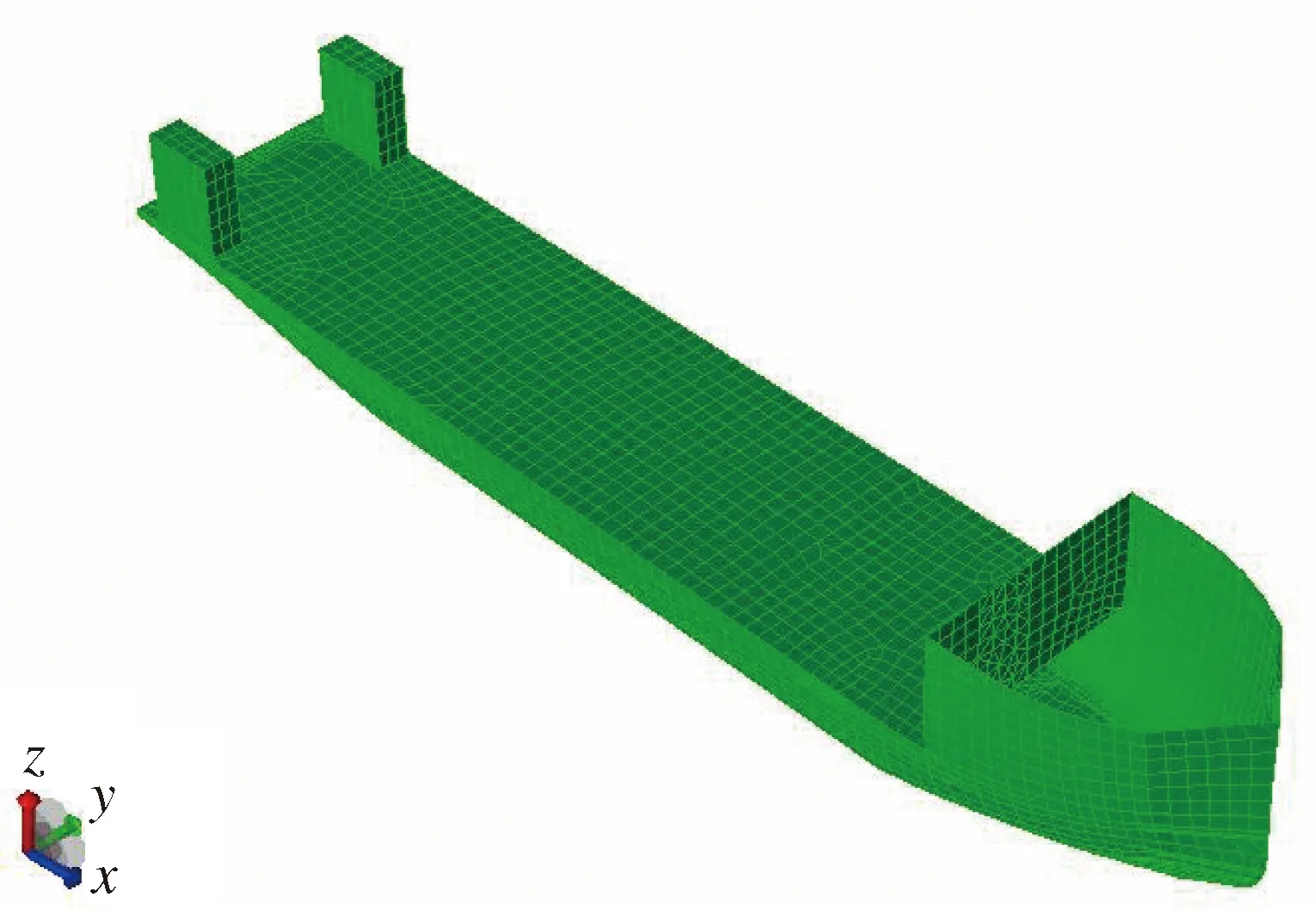
图4 驳船有限元模型Fig.4 Finite element model of barge
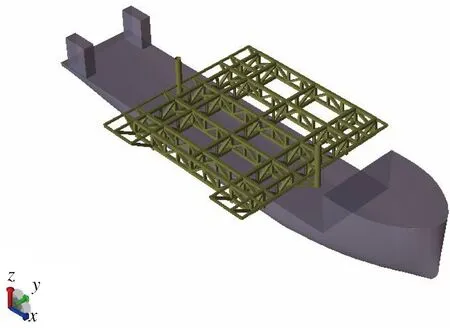
图5 驳船和上部模块布置图Fig.5 Layout of barge and topside module
2.4 装载工况
选取上部模块上驳船调载后最终达到的吃水状态为计算工况。表1给出了驳船运输上部模块时的相关参数。
2.5 环境条件设定
目标平台的作业海域为我国南海深水海域。由于JONSWAP谱与南海海域的海浪谱无论是谱峰值的大小还是谱的形状都比较接近,因此本文选用JONSWAP谱。基于指定的运输路线和日程,海上运输安装环境条件选取为非台风海况一年一遇的环境载荷:海浪谱为JONSWAP谱,选取平均的谱峰提升因子3.3;波高HS=3.9 m;谱峰周期TP=7.1 s。

表1 驳船与上部模块整体参数Table 1 Parameters of the barge and topside module
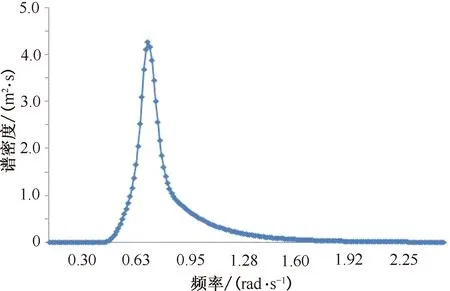
图6 JONSWAP谱Fig.6 JONSWAP spectrum
3 运动响应分析及短期预报
基于三维势流理论[7],采用SESAM软件中的HydroD/Wadam 模块进行计算,得到驳船和上部模块整个系统的运动响应RAO后,即可结合相应的海域海况资料,采用谱分析方法对驳船与上部模块组成的系统在不规则波中的运动响应值等进行预报。
3.1 水动力计算步骤
使用SESAM软件计算驳船和上部模块整个系统运动与波浪载荷响应,其具体步骤如下:
(1)通过Genie模块建立驳船的湿表面模型,如图7所示;
(2)将建好的水动力模型导入到HydroD 模块中进行计算;
(3) 用HydroD/Wadam 模块设定浪向搜索区间为(0°~180°),步长为45°,浪向在0°~180°等概率分布,波浪频率的区间为(0.1~2.5 rad/s),步长为0.05 rad/s,即可求出对应这些浪向和频率组合的传递函数RAO;
(4)最后采用后处理模块Postresp计算得出其动力响应。
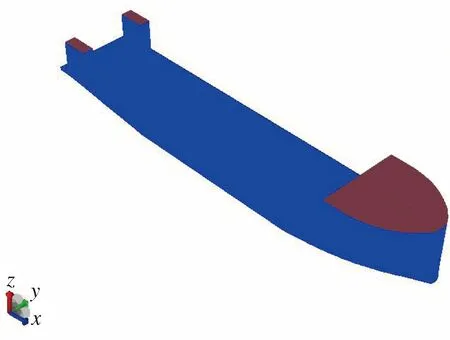
图7 驳船的湿表面模型Fig.7 Wet surface model of the barge
3.2 波浪载荷响应幅值
根据选定的设计波,驳船的表面水压力可以由伯努利方程计算得到。水压力包括静水压力和动水压力,动水压力又可分为线性动水压力和非线性动水压力[8]。其中线性动水压力指一阶波浪力,非线性动水压力指的是二阶波浪力,对驳船运动响应有影响的主要是一阶波浪力。计算结果如图8~10所示。
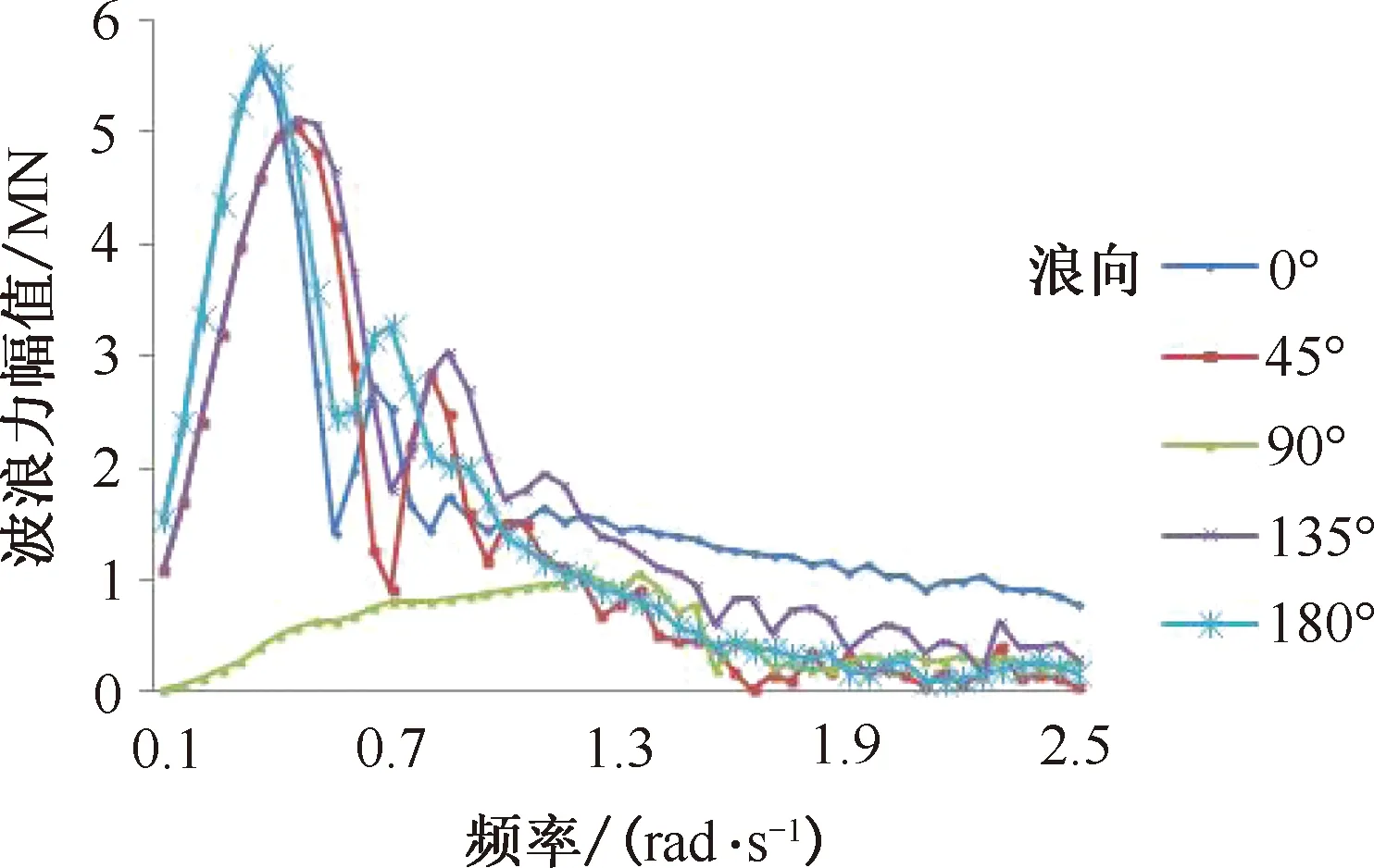
图8 x方向受到的波浪力幅值Fig.8 Amplitude of wave force in x direction
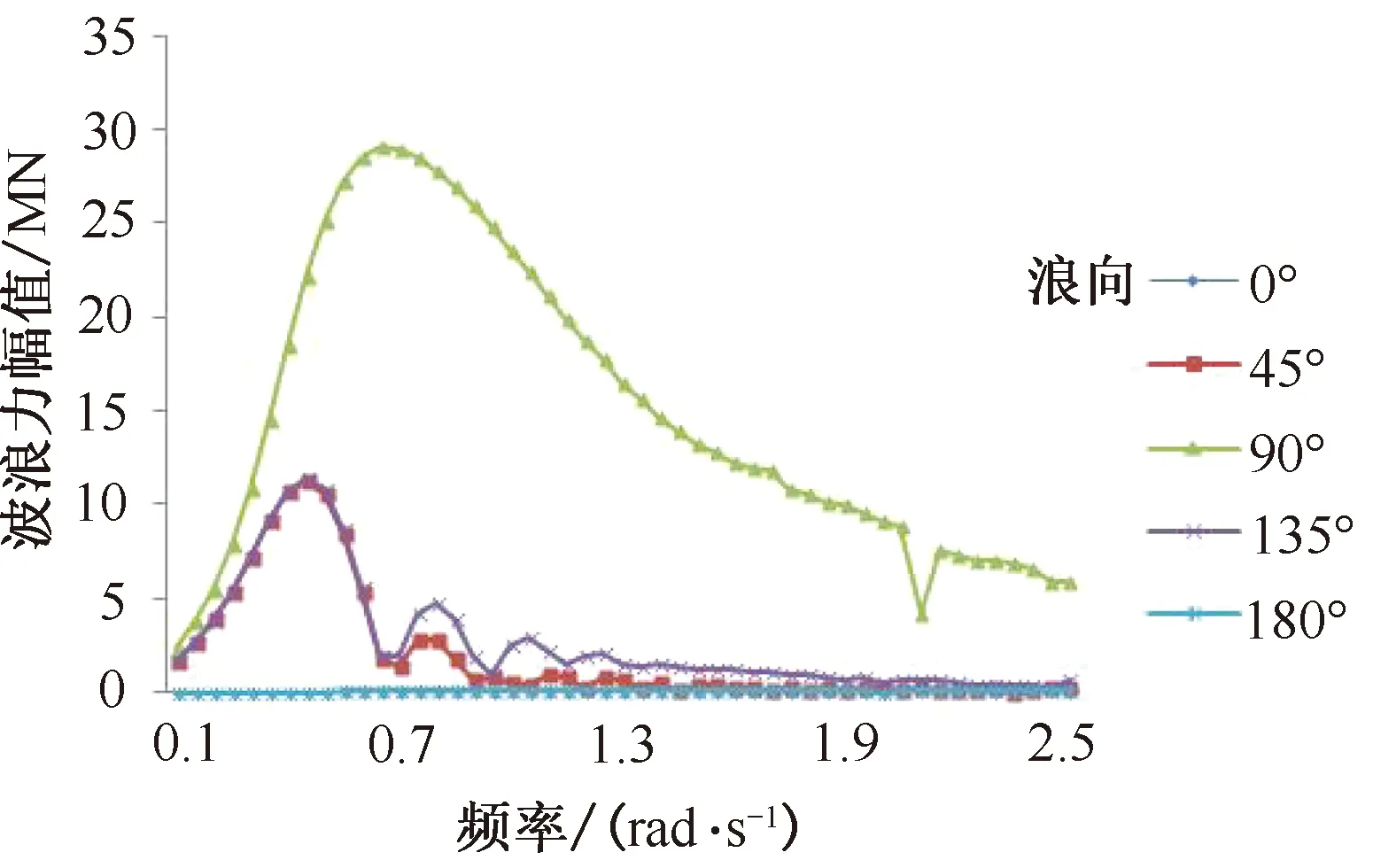
图9 y方向受到的波浪力幅值Fig.9 Amplitude of wave force in y direction
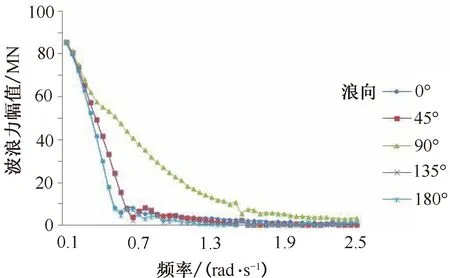
图10 z方向受到的波浪力幅值Fig.10 Amplitude of wave force in z direction
3.3 运动响应幅值RAO
从图11可以看出,浪向为45°时,驳船和上部模块整个系统的纵荡、纵摇和垂荡运动首先随着波浪频率的增加而增大,随后逐渐减小,当波浪的频率不断增大趋近于正无穷时,整个系统各个方向的运动趋近于零。驳船的纵摇、横摇和艏摇运动响应最大值发生在波浪频率为0.45 rad/s附近。当波浪能量集中频率范围接近系统的固有频率时,整个系统各个自由度的运动都非常剧烈,而当波浪的频率远离固有频率时,整个系统的运动相对平和。所以,为保证安全运营,应该使驳船和上部模块整体系统的固有频率避开波浪能量集中频率范围。

图11 纵摇、横摇和艏摇运动情况下的RAOFig.11 RAO of pitch,roll and yaw motion
对驳船和上部模块整体系统进行水动力计算,结果如图12所示。由图12可知由波浪引起的纵荡和艏摇运动都比较小,因此本文主要考虑横摇、纵摇、垂荡和横荡的影响。
从图12(a)和图12(c)可知,在该系统的浪向角为90°时,垂荡和横摇的运动幅值最大;浪向角为0°时,垂荡和横摇的运动幅值最小,并且随着波浪频率先增大而后减小。换言之,横浪对该系统的垂荡和横摇影响较大。从图12(b)可以看出,在浪向角为45°时,系统的纵摇运动幅值最大;对于艏摇而言,在浪向角45°或135°时,艏摇运动幅值最大。

图12 六个自由度情况下的RAOFig.12 RAO of six degrees-of-freedom motion
3.4 短期预报
在获得驳船和上部模块整体系统运动的RAO之后,结合JONSWAP谱,在一年一遇的环境载荷下,进行运动性能的短期预报,得到驳船和上部模块整体系统在六个自由度的运动幅值。整个系统在每个浪向角下的运动幅值如图13所示。从图13可以得知在每种运动情况下的最大运动幅值,结果汇总如表2所示。
从表2可知,在驳船与上部模块组成的系统运动响应中,垂荡、纵摇、横摇以及横荡的影响较大,并且在垂荡运动情况下,最大运动幅值发生在浪向角为90°时;在纵摇和纵荡的情况下,浪向角为45°时,该系统的运动幅值最大。在垂荡情况下最大幅值没有发生在传统的45°浪向时,纵荡和纵摇最大幅值也没有发生在传统的0°或180°浪向时,说明该系统艏向对浪向的跟随性不是很好,需要做更进一步的探讨。
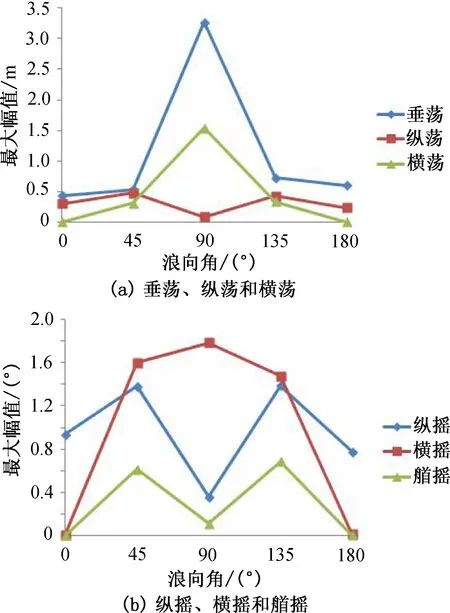
图13 不同浪向角下的运动幅值Fig.13 Amplitudes in different wave directions
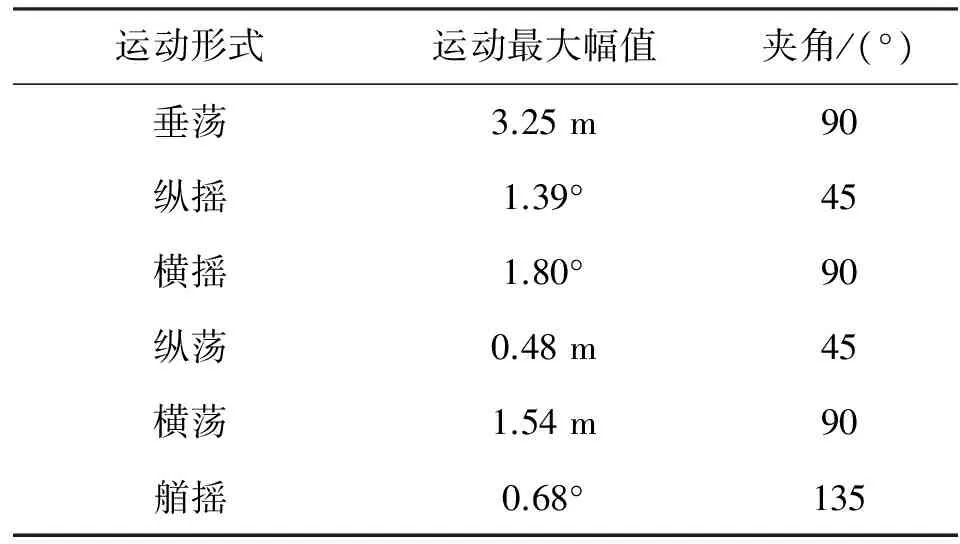
表2 短期预报运动最大幅值Table 2 Maximum amplitude of short-term response
4 结 语
本文依托三维线性势流理论,运用SESAM软件中的Genie模块和HydroD模块对驳船和上部模块组成的系统进行了运动响应分析,预报了该系统的水动力响应特性,得到了波浪能量集中频率范围。为了保证大型上部模块运输过程中的安全性,应该避开此波浪集中的频率范围,使该系统具有较小的波浪响应。此外,从短期预报结果中可以得出,在横摇和垂荡的运动幅值最大、浪向角为90°时,需要特别关注整个系统的安全性。
[1] 范模,李达,马巍巍,等.南海超大型组块浮托安装的关键技术[J].中国造船,2011,51(7):132.
[2] 张大刚,樊之夏,孙伟英.半潜式生产平台组装方式及运输方法研究[C].第十五届中国海洋(岸)工程学术讨论会论文集,2011:295.
[3] 白艳彬.深水半潜式钻井平台总体强度分析及疲劳强度评估[D].上海:上海交通大学,2010.
[4] 张朝阳.深水半潜平台总体强度分析中波浪载荷计算与简化建模方法研究[D].上海:上海交通大学,2012.
[5] 刘应中,缪国平.船舶在波浪上的运动理论[M].上海:上海交通大学出版社,1988.
[6] 陈海龙,白雪平,刘成名,等.利用SESAM软件对驳船进行水动力性能分析研究[J].传感器与微系统,2009,28(12):48.
[7] 刘海霞,肖熙.半潜式平台结构强度分析中的波浪载荷计算 [J].中国海洋平台,2003,18(2):1.
[8] 赵林岗,徐升,谢永和.基于SESAM的游钓船动力响应研究[J].浙江海洋学院学报(自然科学版),2010,29(6):572.
Short-TermResponsePredictionforMotionResponseofLargeUpperModule
YIN Yan1,LI Chun-hui1,WU Xiao-yuan2,WANG Chao1
(1.ShanghaiWaigaoqiaoShipbuilding&OffshoreEngineeringDesignCo.,Ltd.,Shanghai200137,China; 2.ChinaStateShipbuildingCorporation,Shanghai200137,China)
Based on the three-dimensional potential flow theory,we study the motion response characteristics of the system of semi-submersible barge and large upper module of semi-submersible production platform under the wave force by SESAM software.Combined with operation sea state,we predict the short-term response values of the system by using the spectrum analysis method,providing theoretical basis for ensuring the safety and reliability of large upper module during the transportation process.
large upper module; semi-submersible barge; motion response; short-term response prediction
2015-09-18
国家工业和信息部项目(工信部联装[2012]534号)
尹艳(1988—),女,硕士,助理工程师,主要从事船舶与海洋结构物设计制造方面的研究。
U661.32
A
2095-7297(2016)01-0025-06
猜你喜欢
中外文摘(2022年13期)2022-08-02 13:46:16
学苑创造·A版(2022年4期)2022-06-18 11:22:44
海洋石油(2021年3期)2021-11-05 07:43:10
中国海上油气(2020年5期)2020-10-20 09:28:48
当代陕西(2020年24期)2020-02-01 07:06:46
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
船海工程(2015年4期)2016-01-05 15:53:40
船海工程(2015年4期)2016-01-05 15:53:30
中国航海(2014年1期)2014-05-09 07:54:24
广东造船(2014年3期)2014-04-29 00:44:03