基于矩阵式硅光电池组的光电定位系统的设计
2015-12-31 11:07李建秋路春光
机械工程与自动化 2015年4期
李建秋,路春光
(河北联合大学 机械工程学院,河北 唐山 063000)
0 引言
随着现代技术的进步,定位瞄准的实现方法也越来越多样化,大至日渐成熟的激光定位与激光瞄准,小至实用的硅光电池组,可谓各具特色。本文设计的是一种由硅光电池组成的矩阵电路,由矩阵电路完成对激光信号的收集与判断,并反馈给PLC进而控制步进电机带动机械装置,以完成自动控制找准定位的目的。
1 硅光电池组的光电定位系统组成及工作原理
整个光电自动跟踪定位系统主要由激光发射器、硅光电池组、PLC控制器、步进电机以及机械运动装置组成。本系统使用PLC控制器实现对硅光电池组的控制,可以实现对硅光电池组位置方向的控制,以完成对激光位置的找正与调节。其工作原理是:激光发射器固定不动并发射出持续的激光信号,激光信号照射到硅光电池组上面,通过矩阵电路对激光信号进行采集判断;由硅光电池组发出的电压信号经信号放大器放大后传递给光电开关经过逻辑运算传递给PLC,再由PLC控制步进电机,进而带动机械装置实现对激光信号的自动跟踪与定位。光电定位系统结构框图如图1所示。

图1 光电定位系统结构框图
2 光电定位系统的硬件设计
2.1 激光发射器与硅光电池组的选择
激光发射器选用大功率红光激光器,发射激光波长为694nm。
选用型号为DU10的硅光电池,它具有光电倍增管、光电管、硒光电池所无法比拟的宽光谱响应,特别适用于工作在300nm~1 000nm光谱范围的各种光学仪器,对红光有较高的灵敏度,该器件体积小,性能稳定可靠。
2.2 硅光电池组的设计
本系统中硅光电池组主要用来收集激光信号,并判断激光信号的位置。
硅光电池组由25个大小相等的硅光电池片组成5×5的矩阵式,采用矩阵式的排列方式可以减少占用PLC的I/O口数量。由硅光电池组成的矩阵电路与激光发射器工作时的放置位置如图2所示。矩阵电路的行线与列线的交叉位置为硅光电池的放置位置,矩阵电路与PLC的连接示意图如图3所示。硅光电池经过激光照射会产生电压,由于硅光电池受自然光照射对电压信号的影响比较大,故在硅光电池前再安装上滤光片,这样就可以有效地排除自然光的干扰。

图2 矩阵电路工作位置示意图
2.3 前置放大器的选用
前置放大器采用同相比例放大的原则,原因是:①硅光电池内阻比较小,若采用反相比例放大,当硅光电池受到外界自然光强度变化时,输出电压将不会呈线性变化;②硅光电池输出为直流电压,所以可以不必考虑电压带宽和压摆率的限制,采用同相比例放大电路,输入阻抗高,输出阻抗低,这样可有效减少外界光信号的干扰,且输出电压与输入电压同相,便于进行后期数据处理与分析。
在自然光的照射下,本系统使用的硅光电池输出电压大概为600mV,为方便进行A/D变换,选用放大倍数为5左右,则硅光电池的输出电压在3V~4V之间。
2.4 A/D转换
FX2N-4AD是FX2N系列PLC的模拟量输入模块,有CH1~CH4四个通道,每个通道都可以进行A/D转换,分辨率为12位,采集信号电压为-12V~12V,分辨率为5mV。FX2N-4AD通过扩展电缆与PLC相连,二者之间通过32个16位缓冲存储器(BFM)交换数据。在程序中使用识别码来确认特殊模块,FX2N-4AD模块的识别码是K2010。本系统基于电压的输入/输出,选择模拟范围为-10VDC~10VDC,将信号的+、-极分别与模块的V+和VI+相连。FX2N-4AD与外部信号的接线图如图4所示。
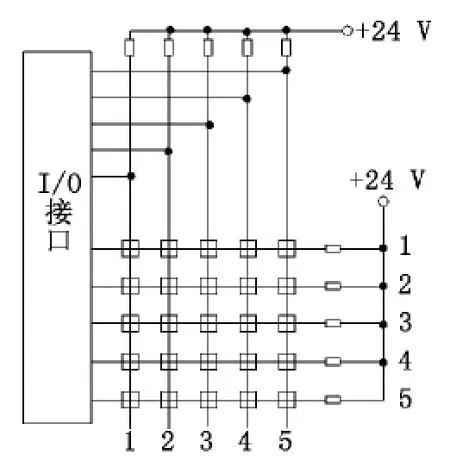
图3 矩阵电路与PLC的连接示意简图
2.5 系统硬件连接图
系统的硬件接线图如图5所示。5×5的矩阵电路与 FX2N-4AD的输入通道相连接,FX2N-4AD 通 过扩展电缆与FX2N-64MT相连接,FX2N-64MT的输出接口连接两个两相步进电机驱动器,由步进电机驱动器带动步进电机实现步进电机的驱动。FX2N-64MT直接由220V交流电提供电源,FX2N-64MT上面有24V的转换接口,因为步进电机驱动器上面的脉冲与方向信号需要5V供电,因此,由FX2N-64MT上面的24V转换接口与KA7805电源模块相连接,由KA7805为步进电机驱动器提供5V电源。
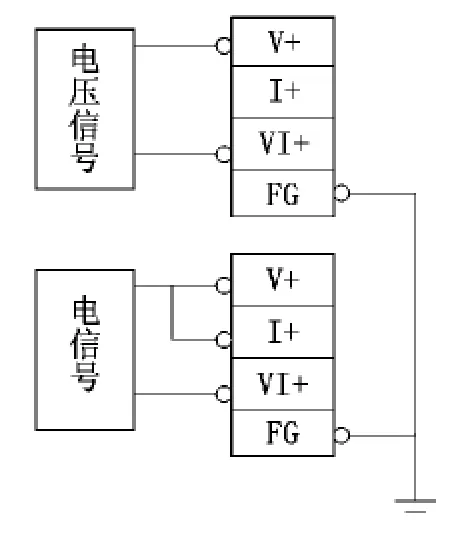
图4 FX2N-4AD与外部信号接线图

图5 系统硬件接线图
3 光电定位系统软件设计
作为系统的核心部分,数据处理与数字控制在系统的运转中起重要作用。系统的性能和参数与处理控制部分的结构与流程密切相关,本系统采用GX Developer软件进行编程控制,实现对机械装置的数字化控制。外部激光信号的模拟量通过FX2N-4AD模块输出控制信号的数字量,然后驱动步进电机进而控制机械装置。PLC内部采用闭环反馈的PID算法,接收FX2N-4AD产生的数字信号,将数字量信号与预先设定的信号两两比较、比较的结果作为判定步进电机下一次的预转定量。通过不断地采样、比较、电机转动、再采样,就可以实现对激光信号自动跟踪的功能。系统运转流程如图6所示。当激光照射到硅光电池上面时,将所对应的硅光电池上面的电压值与中间位置U33硅光电池产生的电压值相比较,比较信号通过PLC处理并分别作为步进电机的输入。一个步进电机控制系统在平面X方向内的旋转,另一个步进电机控制系统在平面Y方向的旋转,两者配合最终实现光电定位的目的。激光照射到硅光电池每个位置所对应的电机运转情况如表1所示。
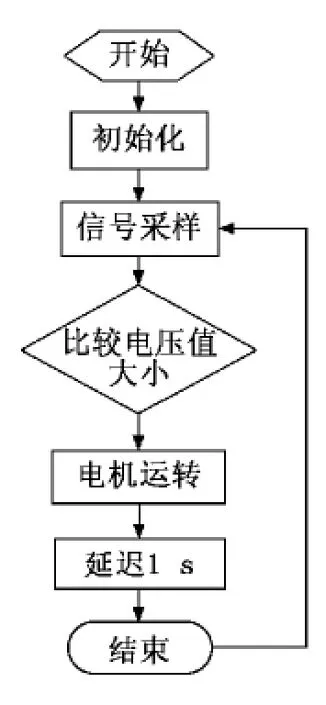
图6 系统运转流程图
硅光电池的电压值用来判定矩阵电路中激光信号的位置,经过PLC中内部比较指令运算进而控制步进电机的运转方向。PLC不直接控制步进电机运转,需要采用步进电机驱动器进行控制,PLC内通过设定脉冲量大小来控制每次步进电机的输入脉冲数量,进而调节转动角度大小。运算部分与控制部分独立,可以极大地提高系统跟踪目标的效率。
4 系统测试
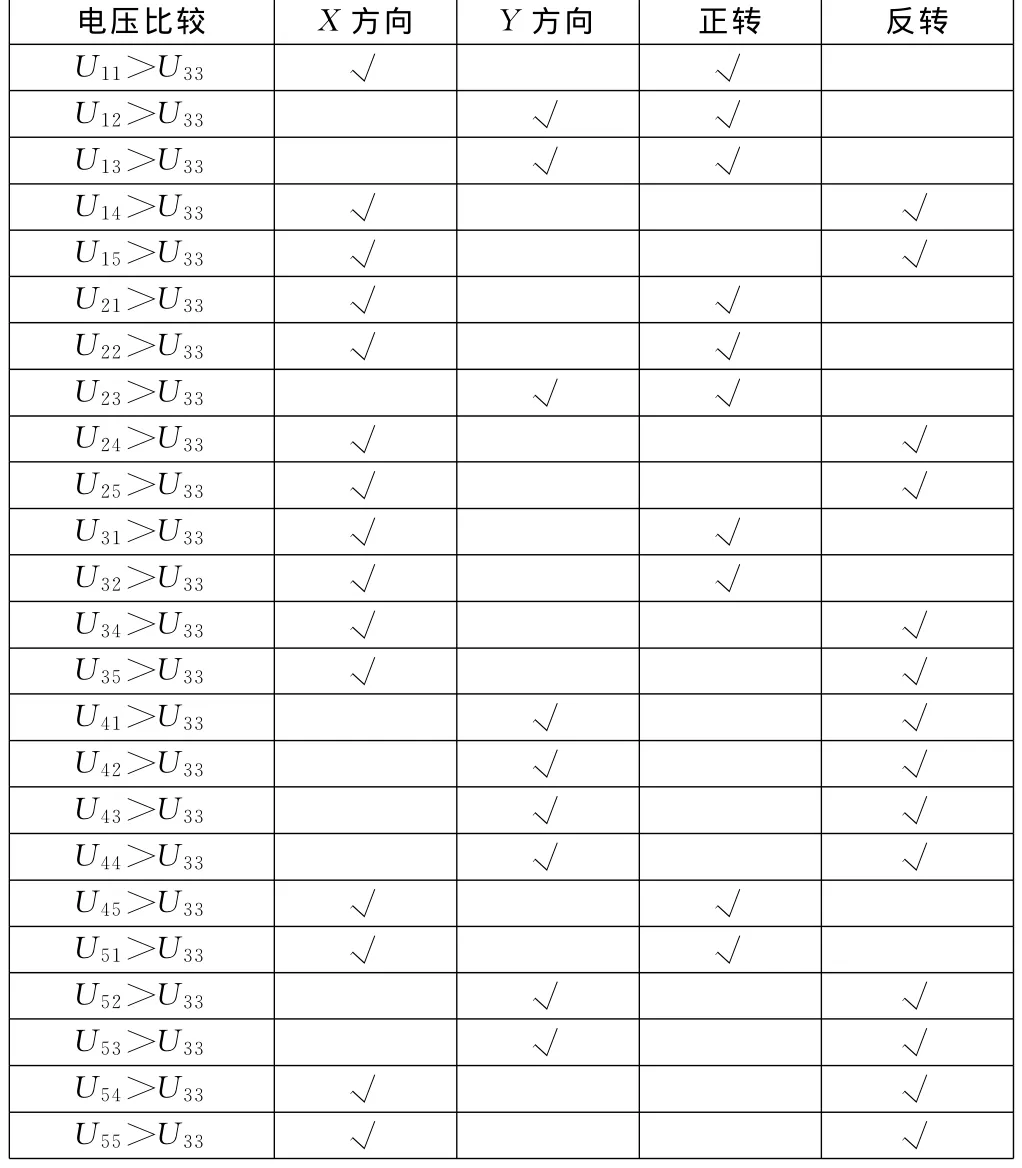
表1 电机运转情况
本系统设计完成后经过多次实验测试与调节输入步进电机脉冲量的大小,使机械装置的运行误差控制在3mm内,且响应时间小于1s,能够迅速准确地实现二维平面内的光电定位跟踪的目的。
[1]李翔.基于硅光电池的光电自动跟踪系统的实现[J].湘潭师范学院学报(自然科学版),2006(4):51-54.
[2]王宝印.二自由度太阳自动跟踪装置控制系统的研究[D].天津:河北工业大学,2013:10-18.
[3]张春光.太阳能电池板二维自动跟踪系统的研究[D].太原:太原科技大学,2013:19-24.
[4]胡朝晖,汪凯,车奇,等.机载光电跟踪系统作用距离建模与仿真[J].探测与控制学报,2005(4):52-54,58.
[5]王新杰,章海军,黄峰.光电反馈式静电悬浮的光电控制系统[J].光子学报,2002(2):187-190.
[6]顾希,王键.自制光电控制智能化吸氧计时器[J].中国医疗器械杂志,2006(1):60,75.
猜你喜欢
昆明医科大学学报(2021年6期)2021-07-31
科学(2020年5期)2020-11-26
小哥白尼(趣味科学)(2019年2期)2019-04-17
物理实验(2019年1期)2019-02-13
消费导刊(2017年19期)2017-12-13
小学阅读指南·高年级版(2016年1期)2016-09-10
电子制作(2016年23期)2016-05-17
电源技术(2015年11期)2015-08-22
电源技术(2015年7期)2015-08-22
电源技术(2015年9期)2015-06-05