线阵高清技术在货车装载视频监视系统中的应用研究
2015-12-30 03:32赵耀
铁道通信信号 2015年9期
赵 耀
铁路货车装载视频监视系统作为货安系统的一部分,可自动收集货物装载状态的视频和图像,可为各级货运管理部门和作业部门提供清晰、直观的货车装载信息。目前铁路货车装载视频监视系统有面阵高清和线阵高清2种方式。
面阵高清适用于交接作业点、货场等需要连续场景记录的场合,线阵高清则适用于货检站等对运动列车进行记录。与面阵高清相比,线阵高清可以提供更高分辨率的细部图像,满足远程对货车装载加固状态、篷布、门窗盖阀的观察需求。
为此,分析线阵高清技术的原理,研究关键技术,以满足铁路货车装载对视频监视系统的要求。
1 线阵高清技术
1.1 电荷耦合器件 (CCD)
电荷耦合器件 (CCD)是数字相机、数字摄像机的重要组成部分,通过驱动电路控制,可以实现光电信号、模拟和数字信号的转变。按照应用方式,可分为面阵CCD和线阵CCD 2种。
面阵CCD可以直接获取二维图像,常规的数字相机、数字摄像机通常采用面阵CCD作为感光元件。由于面阵CCD的像素总数大,单幅图像采集所需的时间较长,在现有技术水平下面阵CCD单列像素数量小,输出图像的画幅也会受到制约。
线阵CCD保留少量宽度方向的像素,单列的像素数量很高,单次拍摄只能获取条形图像,可以认为它直接获取的是一维图像。由于单块线型CCD的像素总数较少,这种CCD图像采集的速度快,输出图像的总像素可以大于面阵CCD。
1.2 技术原理
线阵高清技术是采用线阵CCD作为感光元件获取数字图片的高清拍摄技术。由于线阵CCD只能直接获取一维图像,为了获取二维数字图片,被拍摄对象与线阵相机之间必须存在相对运动,需要对相机采集图像的频率进行适当控制并进行后台图像处理,该过程类似于扫描,也称为扫描成像技术。线阵高清技术原理如图1所示。
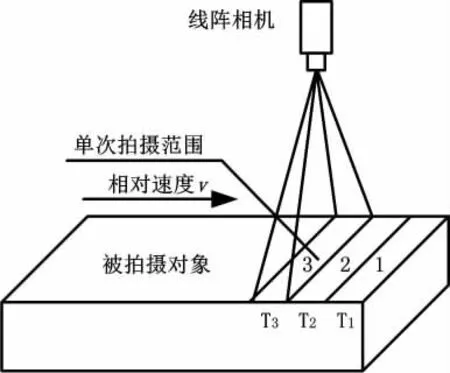
图1 线阵高清技术原理
线阵相机拍摄的宽度非常小,即图1中示意的单次拍摄范围,相机以时间间隔dT进行拍摄,即相机的采集频率f=1/dT。在T1时刻,线阵相机拍摄到图片1;由于被拍摄对象和线阵相机之间存在相对速度v,在T2=T1+dT时刻线阵相机拍摄到图片2;直到被拍摄对象离开了拍摄范围,线阵相机共拍了N张图片。通过后台将以上拍到的N张图片按照顺序拼合在一起得到被拍摄对象的二维图像。
1.3 适用场合
线阵高清技术有一定的适用场合。首先,线阵CCD的列像素值非常高,宽度方向上像素数非常少,单块CCD的像素总数要少于面阵CCD,因此单次拍摄的图像采集速度快,适用于对拍摄速度要求较高的场合。同时,由于单列的像素值远高于面阵CCD,通过拼合而成的二维图像可以具备超高分辨率。
其次,线阵高清拍摄二维图片必须要求拍摄对象与线阵相机之间存在相对速度,并且要根据相对速度v调整线阵相机的采集频率f,因此线阵高清的控制系统应准确测量相对速度v,否则会造成严重的图像失真。
最后,线阵高清技术通过拍摄对象的相对运动获取拍摄对象的图片,拍摄对象的运动不会导致图片不清晰,并且不变的背景很容易被滤除,可以更好的突出主体,比面阵高清技术更适合监视规律运动的物体。
考虑到铁路货车在行进过程中具有一定的行进速度,并且是在铁轨上沿固定方向线性运行,通过将线阵相机固定在货车的上方和侧面,就可以利用线阵高清对货车顶部、侧面的装载状态进行监控,相比面阵高清技术更适合工作人员对货车装载状态的细节进行监视。
2 货车装载视频监视系统
在进、出货场或铁路沿线等有监控需求的地点布置线阵相机,利用线阵高清技术对货车顶部、侧面的装载状态进行拍照,并对列车车号进行识别,将各车厢照片与车次、车号、顺位等信息结合后传送至后台并保存。由于线阵高清相机拍摄的照片具备超高分辨率且可过滤掉无关背景,工作人员可以在远端清晰观察车厢门、平板车端板、篷布、顶盖及绳索等状态。
线阵高清系统主要由高清线阵相机系统、车号识别系统及现场传感器、传输设备、后台设备等组成,系统架构如图2所示。

图2 线阵高清系统架构
2.1 高清线阵相机系统
高清线阵相机系统由线阵相机、光源、现场控制器及配套的安装门架、供电及接地设备组成。
根据对货车顶部、侧面装载状态的监控需求,需要在货车上方、左侧、右侧分别安装线阵相机。还应根据现场的需求选择合适的安装门架,如龙门架、L型门架等,确保设备安装的稳定性与安全性,并满足线路的限界要求。线阵相机的安装位置如图3所示。
线阵相机的安装位置应根据相机的焦距、可能通过列车的高度等信息确定;光源应在线阵相机的拍摄范围内均匀分布,同时保证在夜晚和逆光等情况下的图像质量,可以选用线性高亮度光源。
现场控制器接受车号识别系统或现场传感器的来车信号后,启动线阵相机和光源,控制线阵相机以频率f进行图像采集,并将图像通过传输设备传送至后台。
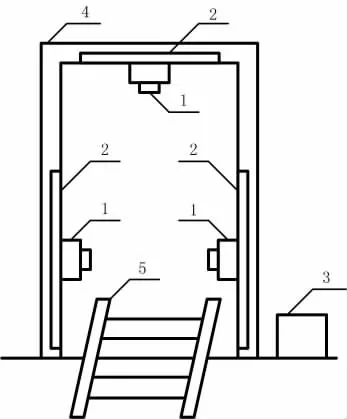
图3 线阵相机安装示意图
2.2 车号识别系统及现场传感器
车号识别系统及现场传感器具备提示来车信息,实现车号识别、车速测量、车厢分辨等功能,并将相关信息传给高清线阵相机系统及后台设备。
车号识别系统通过安装在2条钢轨之间的地面车号识别装置,利用RFID技术扫取安装在货车车辆、机车底部芯片中的车辆信息,目前通常采用成熟的车号识别设备,通过与系统接口实现对来车车号的识别。常用的现场传感器为磁钢,主要部署方式:在来车方向上相距高清线阵相机一定间隔布置一套磁钢,实现对来车的判断,并作为车号识别系统、高清线阵相机系统的启动信号;在线阵相机安装位置安装一个磁钢,可以实现对车厢的判断;这2个磁钢分别记录货车车轮通过的时间,通过时间差可以计算列车的车速。
因此,车号识别系统配合二套磁钢,就可以从功能上满足系统要求。
2.3 传输设备
由于现场设备与后台设备距离较远,一般采用光传输方案。在现场、后台设置交换机,实现设备的接入;设置光端机,通过光缆连接现场交换机与后台交换机。
2.4 后台设备
后台设备包含服务器、工作站、打印机、显示器等,以及配套的机柜、工作台。其中,服务器实现图像存储、处理等功能;工作站、显示器、打印机为工作人员提供人机交互界面,满足工作人员远端监控的需求。
3 关键技术研究
目前线阵高清技术在对运动中列车装载状态的监视还存在图像变形、精度不高等问题,且不能通过图像对车辆横向微小位移进行检测,大量检查工作还要依靠工作人员人工完成,影响了系统的应用效果,为此需对其关键技术进行研究。
3.1 线阵高清相机控制
不同于传统视频监视系统的实时摄录,线阵高清相机仅捕捉通过列车的图像,需要一套独立的控制方法,流程如图4所示。
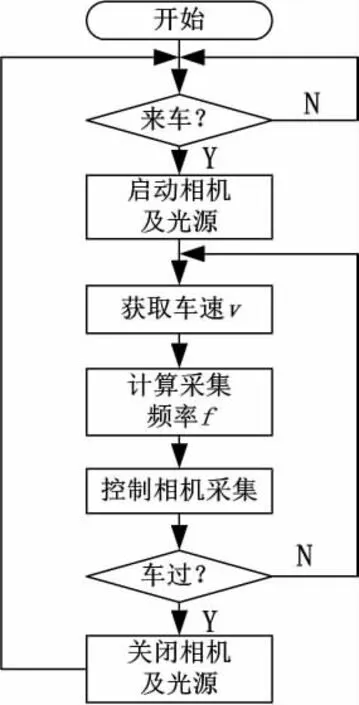
图4 线阵高清相机控制流程图
考虑设备的寿命和节能要求,线阵相机和光源在无车的情况下处于关闭状态,直到启动磁钢探测到列车经过时,才启动相机和光源。系统通过接口获取现场传感器测量的来车车速v,并依此计算线阵相机的采集频率f,进一步控制线阵相机以频率f进行图像采集。当现场传感器确认列车已经完全通过的时候,系统关闭相机及光源,等待下一次来车信息。至此,高清线阵相机系统完成了一次对通过列车的图像采集。
由于对线阵相机及光源的控制属于现场控制级别,且与车号识别系统、现场传感器等具有众多接口,宜采用现场控制器进行直接控制。同时,随着DSP、FPGA等控制器性能的提高,采用现场控制器便于将车号识别、车速测量、车厢判断与线阵相机控制、光源控制等功能集成在同一个控制器内,有利于提高系统的集成度和可靠性,降低图像匹配错误的发生概率。
3.2 车速测量及采集频率计算
由于线阵高清技术还原二维图像需要将多张一维图像拼合,获取一维图像时需要根据车速v对采集频率f进行严格控制,才能保证图像不发生变形。
设线阵高清相机拍摄单张照片的列方向上像素为ND,宽度像素数为dNL。将一组一维照片合成后的图片列方向上像素依然为ND,宽度像素数则变为n次采样的叠加NL=n·dNL,对应照片中拍摄图像的实际宽度范围为D,列车行进距离为L,如图5所示。

图5 线阵高清相机图像示意图
为了满足图像横纵比例与实际拍摄对象相符,要满足式 (1)的关系:

列车行进距离为L时,经历的时间t=L/v,对应线阵相机的采样次数n=t/dT=tf。由此可以计算采样频率与列车速度之间的关系,如式 (2)所示:

上式中ND、dNL为线阵相机的基本参数,D可以通过现场测量获得,因此经过现场安装调试后采集频率只随着车速v变化。若车速测量不准确,会出现图像在列车行进方向拉伸或压缩的情况,不能满足对依靠图像进行距离精确测量的场合。
目前车速测量主要依靠磁钢进行计轴判断,这种方法的实时性、准确性不高,且容易受到现场其他因素的干扰,仅适用于匀速行进的列车。若设置高清线阵相机处列车速度发生变化,采用磁钢测量车速可能会导致图像比例失真。在系统中选用雷达测速等实时性强、测量结果准确的设备有助于提高图像精度。
4 总结
线阵高清技术可以满足铁路货车装载视频监视系统要求全天实时监控的需求,可以提供车辆整体图像信息来观察货物装载加固状态,可以提供细部图像信息观察车辆篷布、门、窗、盖、阀等状态及关闭情况,并且对运动列车进行监视。目前该技术已在部分货运站得到应用。
与高清线阵技术结合的现场传感器在速度测量、车厢判别等方面实时性及精度较低,容易造成匹配错误、图像变形失真。通过采用先进传感器或测量设备,改进线阵相机控制算法,可以提升图像质量,提高图像精度。在获取高精度图像的基础上,可对线阵高清拍摄的图像进行相关检测和距离测量,后台用图像处理技术实现装载异常状态的自动识别和预警,从而提高货安系统对异常装载状态的识别能力,提高工作效率,进一步降低安全风险。
[1] 于冬,顾培亮,陈钟,等.铁路货车装载状态监视和超限检测系统的研究[J].中国铁道科学,2004,25(5),141-144.
[2] 雷志勇,刘群华,姜寿山,等.线阵CCD图像处理算法研究[J].光学技术,2002,28(5),475-477.
[3] 肖道林.襄阳北站货车装载状态视频监控系统应用探讨[J].铁道货运,2012(8),1-4.
[4] 张智辉,田地,杨义先.线阵CCD驱动电路设计的几种方法[J].仪表技术与传 感器,2004,30(9),1909-1911.
[5] 周毛德.影响车号识别系统抗干扰能力的原因与相应对策[J].铁道技术监督,2012,40(1),18-20.
猜你喜欢
军事文摘(2022年24期)2022-12-30
哈尔滨铁道科技(2020年1期)2020-07-27
铁道运输与经济(2020年1期)2020-02-28
家庭影院技术(2019年4期)2019-04-17
计算机与数字工程(2019年1期)2019-03-01
文化交流(2019年1期)2019-01-11
铁道通信信号(2018年4期)2018-06-06
读者·校园版(2018年3期)2018-01-18
中国公共安全(2017年7期)2017-10-13
创造(2016年1期)2016-02-01