GHQF精度分析及其在组合导航中的应用
2015-12-28 08:38:54穆荣军梁浩庞宝君崔乃刚
飞行力学 2015年4期
穆荣军,梁浩,庞宝君,崔乃刚
(哈尔滨工业大学 航天学院,黑龙江 哈尔滨150001)
0 引言
星光导航(CNS)、合成孔径雷达(SAR)和捷联惯导(SINS)组成的CNS/SAR/SINS组合导航系统是一种有发展前途的自主导航方式[1-2]。在组合导航系统中,当姿态失准角为大角度时,系统状态方程和量测方程呈现非线性。递推贝叶斯估计为非线性系统的状态估计提供了最优解决方案,然而贝叶斯估计需要传播整个概率密度,很难获得解析解。高斯系统是一种最为常见的系统,人们基于贝叶斯估计和最小方差准则,推导了非线性高斯滤波公式,并利用相应的近似策略对非线性高斯系统状态的后验均值、方差等进行近似,提出了许多近似非线性滤波方法,如 UKF,KF 和 GHQF 等[3-5]。
UKF作为一种常用的非线性滤波被广泛研究并应用于飞行器组合导航系统,理论上UT变换能够以至少二阶Taylor精度逼近非线性系统的后验均值和协方差。与 UKF滤波过程类似,CKF根据spherical-radial cubature准则,利用具有相同权重的采样点并通过非线性方程的传播来进行状态估计。
本文利用泰勒级数对GHQF,KF和CKF的性能进行了对比分析,并以CNS/SAR/SINS组合导航系统为应用背景对三种非线性滤波算法进行了数学仿真验证。
1 高斯厄米特积分滤波算法
非线性系统方程和量测方程具有离散形式:


式中:f和h为非线性向量函数,可由惯导误差传播模型和观测方程求得;wk-1和vk为不相关的零均值高斯白噪声序列。
高斯滤波需要进行积分运算,单维高斯积分规则可表示如下[6]:

式中:m为单维积分点的数目;γi和wi分别为积分点和积分权值;γi和wi的计算方法如下:J是一个对称三对角矩阵,对角线元素为零,且有为J 的第 i个特征值;wi=为J的第i个归一化特征向量的第一个元素;R为实数集。
对于多维积分的情况,高斯积分可以通过张量积的形式进行扩展。

式中:P=SST。
利用式(5),基于GHQ的积分滤波算法可表示为:
(1)预测:

式中:转换点 ξi由方差阵分解得到为式(4)中 n维高斯积分的积分点;
(2)更新:


2 GHQF算法精度分析
2.1 向量函数的泰勒展开
向量函数f(x)在均值x¯点处的泰勒级数[7]为:

记 δx=[δx1,…,δxn]T,∇ 为偏微分算子向量,则式(11)可以写为:


根据正态分布概率密度的对称性,奇次阶矩均为0,从而式(13)可写为:

因此,经非线性传播后得到f(x)的均值为:


式中:ζ1为交叉项,本文中 ζi(i=1,2,…)均为交叉项。

2.2 GHQF估计精度


其中:

只要积分点的数目足够多,高斯厄米特算法的积分点和积分权值具有如下性质[8]:

因此有

2.3 估计精度比较
由式(19)和式(26)对比可以看出,利用高斯厄米特积分可以逼近任意阶精度的非线性系统的后验均值,而UKF和CKF只能精确传播至二阶项,从四阶项开始出现截断误差。
为了比较UKF,KF和GHQF的估计精度,只需比较非线性传播的四阶矩精度[9],比较结果如下:

式中:n≤3,k=2,n+λ =3,各项分别为 CKF,UKF和GHQF的四阶矩系数,当系统状态变量维数不超过三维时,GHQF与UKF的捕获精度相当;当状态变量维数较大时,UKF和CKF均会产生较大的截断误差。
3 CNS/SAR/SINS组合导航模型
3.1 捷联惯导误差传播模型
以东北天地理坐标系为导航坐标系,CNS/SAR/SINS组合导航系统在大失准角条件下的非线性惯导误差传播模型[10-11]为:

取状态向量为:

式中各分量依次分别为三向姿态失准角、东向速度误差、北向速度误差、经度误差、纬度误差、三向陀螺常值漂移和三向加速度计零偏。
3.2 量测方程
星光导航系统中星光矢量的实际测量值和理论测量值分别表示为:
星敏感器对星光矢量的实际测量值rb与理论测量值pb有一定的偏差:

星光导航系统中一般将两个星敏感仪正交安装,把星敏感器实际测得的两个星光矢量rb1,rb2与理论测量值pb1,pb2相减可以得到CNS/SINS的观测量,SAR/SINS组合量测信息由INS输出的水平位置与SAR图像匹配输出的水平位置之差构成,则CNS/SAR/SINS组合导航系统量测方程为:
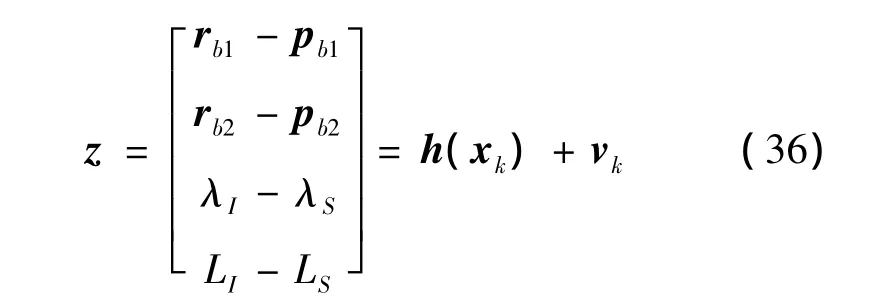
式中:vk为量测噪声。
4 仿真分析
利用UKF,CKF和GHQF设计CNS/SAR/SINS组合导航滤波器,对滤波估计精度进行比较分析。仿真条件为:飞行器初始位置为东经100°,北纬45°,飞行高度10 km,速度150 m/s,航向角35°,俯仰和横滚角均为0°,飞机有1 m/s2的加速度和0.2(°)/s的转弯角速度;捷联惯导陀螺常值漂移0.1(°)/h,加速度计零偏100μg;星敏感器精度为20″(1σ),SAR位置精度20 m(1σ);仿真时间500 s。
图1~图3给出了基于三种非线性滤波算法的CNS/SAR/SINS组合导航滤波器对姿态、速度和位置误差的估计效果。由仿真结果可以看出,基于GHQF的组合导航滤波器对姿态、速度和位置的估计误差最小,验证了在三种滤波算法中,GHQF的精度最高。

图1 姿态失准角估计误差Fig.1 Estimation error of misalignment angle
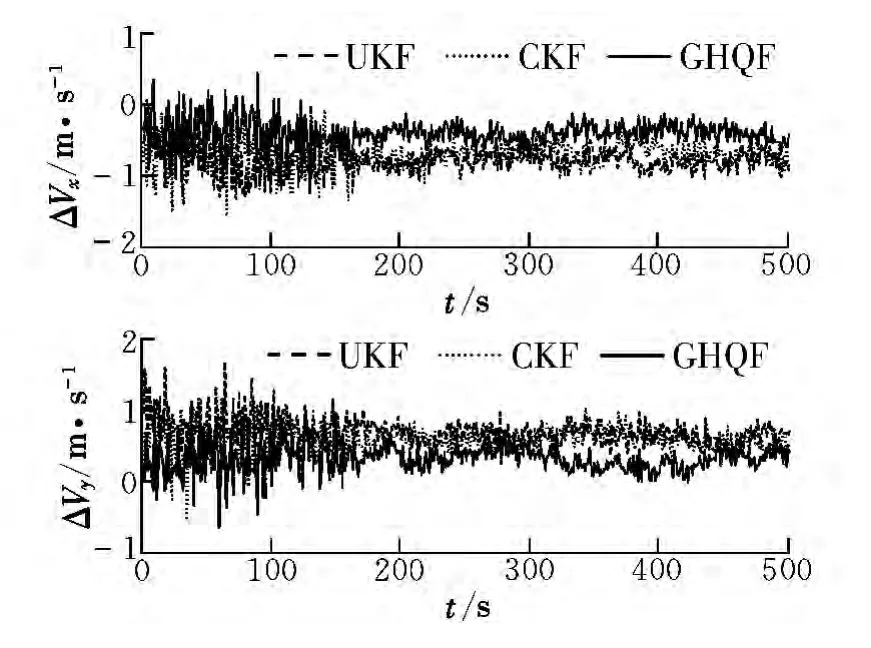
图2 速度估计误差Fig.2 Estimation error of velocity
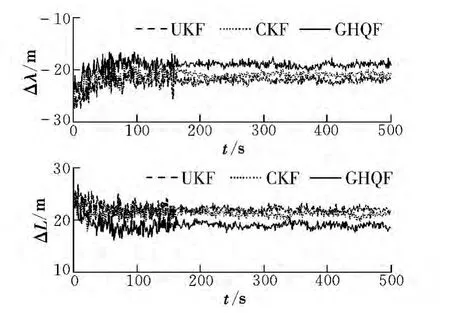
图3 位置估计误差Fig.3 Estimation error of position
根据式(28),当系统维数n≤3时,UKF的精度优于CKF,而在处理高维系统(本算例n=13)时,CKF比UKF具有更好的精度和数值稳定性。
5 结束语
本文利用泰勒级数展开对GHQF,UKF,CKF三种非线性高斯滤波算法进行了精度比较分析。研究结果表明,GHQF能够逼近任意阶精度的非线性系统的后验均值,与UKF和CKF相比,GHQF具有更高的估计精度,并以CNS/SAR/SINS非线性组合导航为应用背景验证了上述结论。然而,GHQF存在计算量大的问题,如何在保持估计精度的同时降低其计算量是对GHQF算法开展下一步研究的重点内容。
[1] 穆荣军,韩鹏鑫,崔乃刚.星光导航原理及捷联惯导/星光组合导航方法研究[J].南京理工大学学报,2007,31(5):585-599.
[2] Zhong Y M,Gao SS,Li W.A quaternion-based method for SINS/SAR integrated navigation system[J].IEEE Transactions on Aerospace and Electronic Systems,2012,48(1):514-524.
[3] Julier SJ,Uhlmann JK.Unscented filtering and nonlinear estimation[J].Proceedings of the IEEE,2004,92(3):401-422.
[4] 邵玮,祝小平,周洲,等.基于UKF的高动态飞行器无源组合导航系统研究[J].飞行力学,2013,31(4):376-380.
[5] Ienkaran A,Simon H.Cubature Kalman filters[J].IEEE Transactions on Automatic Control,2009,54(6):1254-1269.
[6] 梁浩,穆荣军,王丹丹,等.基于稀疏高斯积分的舰机传递对准滤波方法[J].中国惯性技术学报,2014,22(5):11-16.
[7] 秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,2012:213-220.
[8] Ito K,Xiong K Q.Gaussian filters for nonlinear filtering problems[J].IEEE Transactions on Automatic Control,2000,45(5):910-927.
[9] 孙枫,唐李军.Cubature卡尔曼滤波与Unscented卡尔曼滤波估计精度比较[J].控制与决策,2013,28(2):303-312.
[10]付梦印,郑辛,邓志红.传递对准理论与应用[M].北京:科学出版社,2012:26-31.
[11] Dmitriyev SP,Stepanov O A,Shepel SV.Nonlinear filtering methods application in INS alignment[J].IEEE Transactions on Aerospace and Electronic System,1997,33(1):260-272.
猜你喜欢
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
读友·少年文学(清雅版)(2020年7期)2020-11-26 06:13:58
测控技术(2018年2期)2018-12-09 09:00:56
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
少儿科学周刊·儿童版(2017年9期)2018-03-15 14:50:38
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14
计算机工程(2015年4期)2015-07-05 08:28:57