基于干扰观测器的四旋翼无人机轨迹跟踪鲁棒控制
2015-12-28 08:39:30杨柳刘金琨
飞行力学 2015年4期
杨柳,刘金琨
(北京航空航天大学 自动化科学与电气工程学院,北京100191)
对其求导有:
0 引言
旋翼类无人机(UAV)相比固定翼无人机具有垂直起降、悬停等优点,因此受到了各国学者的广泛关注[1-2]。
为了完成无人机自主飞行,跟踪特定的轨迹,需要通过自动飞行控制系统来代替地面站的人为操控。四旋翼无人机具有6个自由度,但是只有4个独立的控制输入,是一个欠驱动系统[3]。针对其具有多输入多输出、强耦合、高度非线性等特点[4],采用了很多线性和非线性的控制策略,如PD控制、滑模控制、反演控制、H∞控制[5-8]等。文献[9]中针对无人机质量随时间变化的情况,设计了自适应反演控制器,以补偿质量不确定性。但是在该研究中,并没有涉及惯性矩阵的不确定性。根据欧拉-拉格朗日动力学模型,文献[10]利用RBF神经网络估计未知的非线性项,不需要模型先验信息,获得了良好的跟踪效果。
现有的控制方法在建模时,大都假设在低速悬停飞行中忽略气动干扰力和干扰力矩的影响[11-12]。实际上,四旋翼无人机在飞行过程中,受到包括近地效应、桨叶挥舞、阵风等外界干扰的影响。这些干扰降低了飞行品质,甚至会破坏无人机的稳定性;因此对四旋翼无人机的飞行控制系统性能提出了新的要求,它必须具有鲁棒性,可以克服建模不确定性和外界气动干扰。文献[13]利用了在滑模面上系统的运动不依赖于模型的优点,采用高阶滑模,设计了四旋翼无人机的抗干扰控制器,既实现了高精度控制,又消除了传统滑模的抖颤现象。本文针对所有自由度均存在干扰的情况,设计了基于非线性干扰观测器的鲁棒控制器,完成了四旋翼无人机的高精度轨迹跟踪控制。
1 四旋翼无人机动态模型
四旋翼无人机由四个螺旋桨呈十字交叉组成,每个螺旋桨通过微型直流电机驱动。两组螺旋桨(1,3)和(2,4)绕着相反的方向旋转,合成运动所需要的推力和转矩。通过改变每个螺旋桨的转速,进而改变升力和力矩,完成上升、偏航、滚转等飞行动作。四旋翼无人机的简化结构如图1所示。
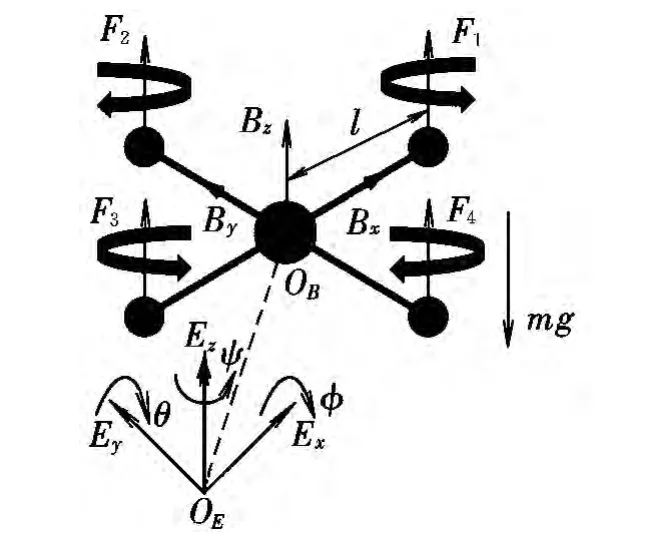
图1 四旋翼无人机结构图Fig.1 Structure of quadrotor UAV
利用欧拉-拉格朗日建模原理,建立系统的动态模型[14]如式(1)和式(2),它们分别代表了无人机系统的位置子系统和姿态子系统动力学模型。值得注意的是,由于姿态子系统中不包含位置变量,可以在适当的系统结构分解基础上,简化控制律设计。

式中:m为总质量;p=[x,y,z]T为无人机在惯性坐标系 J{Ex,Ey,Ez}中质心的位置;U1∈R1和 Γ∈R3为系统的控制输入,分别表示升力和姿态子系统旋转力矩;J为辅助惯性矩阵,是刚体惯性张量i=[Ixx,Iyy,Izz]T在惯性坐标系中的表示;Θ =[φ,θ,ψ]T为欧拉姿态角;g 为重力加速度;e3=[0,0,1]T为竖直方向单位向量;罗德里格斯矩阵R表示平动速度从刚体坐标系B{Bx,By,Bz}到惯性坐标系的转换,可以通过以下公式计算得到:

式中:C(·)和S(·)分别代表余弦函数和正弦函数。
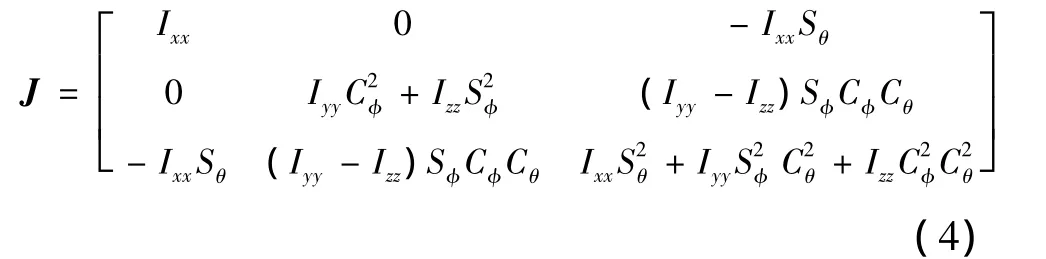
C为科里奥利及离心力项,可以通过以下公式计算得到:

结合式(2)和式(4)可以得到C,为了简洁,其具体表达式见文献[15]。

若螺旋桨转速为ω,则总的升力为:

进一步,可得四旋翼无人机姿态控制输入转矩:

式中:b,c均为与空气动力学相关的常数;l为四旋翼无人机配置半径。本文将升力U1和旋转力矩Γ作为控制输入,设计控制律。
2 位置跟踪控制器设计
假设期望跟踪的参考位置为pd,定义跟踪误差为ep=p-pd,那么位置子系统的误差方程为:

式中:up=U1Re3为待设计的虚拟控制输入。定义第一个误差流形面

考虑到在实际的运输中,由于货物装卸,无人机负载变化,致使总质量具有不确定性。为保证对期望的参考位置信号的精确跟踪,采用自适应策略,设计位置子系统虚拟控制律:

其中:

式中:c1>0为控制器参数;分别代表质量和外界干扰力的估计值,自适应更新律为:




将虚拟控制输入式(11)代入式(16),得:
根据自适应律式(13)和式(14),可得:

根据 Barbalat引理[16],可以得到 σ1→0,t→∞,则有至此,定理1证毕。
在得到虚拟控制输入up后,还需要计算实际的升力U1和姿态子系统中间指令信号 Θd。将式(11)得到的虚拟控制输入写成向量形式up=[Ux,Uy,Uz]T,姿态子系统的中间指令信号设为 Θd=,展开up求解得俯仰角指令信号为:

滚转角度指令信号为:

偏航角指令信号ψd直接由指令信号发生器给出,可以跟踪任意的偏航角。联合式(11)、式(19)和式(20),可以得到实际的升力为:

至此完成了位置子系统的自适应控制器设计,对质量负载和气动干扰力进行估计。在有限的模型先验信息条件下,完成了高精度的位置控制。由于欠驱动特性的存在,不可能对所有6个自由度都进行跟踪。一个合理的控制目标方案为:跟踪位置p和偏航角ψd,同时保证另外两个欧拉角稳定。
3 姿态控制器设计
3.1 干扰观测器设计
式(2)为姿态子系统的动态方程,为了跟踪中间指令信号Θd,需要设计控制输入转矩Γ。同时考虑姿态子系统的模型不确定性和外界非结构性干扰力矩,式(2)可以写为:

式中:J0为控制器设计的名义模型,选取为正定对称矩阵;JΔ为惯性误差矩阵,满足J=J0+JΔ;同理C0和CΔ分别代表科里奥利和离心力模型矩阵和误差矩阵,满足C=C0+CΔ。因此包含模型不确定性和外界干扰的总干扰力矩为:

因此姿态子系统的动态模型可以化为:

为了对d1实施补偿,提高控制系统的鲁棒性,设计下面的非线性干扰观测器(Nonlinear Disturbance Observer,NDO)对 d1进行观测。

式中:Z∈R3为中间变量为增益矩阵为辅助信号;X1∈R3×3为待设计常数矩阵。令

对其求导有:


考虑Lyapunov函数:

对式(29)求导,得:

若选择X1满足

式中:ξ0为正定矩阵。进一步得:

结合瑞利-里兹不等式,有:

式中:λM(·)和λm(·)分别代表相应矩阵的最大和最小特征值。根据式(33)可得:

式中:ξi(i=1,2)为正常数。联合式(32)和式(34),则观测误差具有指数收敛速率。
3.2 控制输入转矩设计
定义姿态子系统的跟踪误差信号Θe=Θ-Θd,,引入第 2 个误差流形:

则姿态误差子系统可以写为:

设计控制输入转矩:

式中:c2>0为控制器设计参数;J0和C0为控制器设计的名义模型,J0取为常数矩阵。
定理2:考虑位置姿态误差子系统式(36),干扰观测器式(25)和输入转矩式(37)构成的闭环系统,存在合适的控制参数 c2,λ2,X1,满足 c2> 1/2,λm(ξ0)>1/2,使得所有误差信号指数收敛,闭环子系统全局稳定。
证明:选取如下的Lyapunov函数:

沿着闭环系统轨迹,求导有:

将控制转矩式(35)代入式(37),可得:

根据Young氏不等式:

只要选择 c2>1/2,λm(ξ0)>1/2,则有:
其中:

再一次利用瑞利-里兹不等式:
可以得到姿态误差子系统指数稳定,定理2证毕。
在定理1和定理2的基础上,选取两个子系统Lyapunov函数之和V0作为整个系统的能量函数:

求导可以得到:

整个无人机控制系统结构如图2所示。

图2 控制器结构Fig.2 Controller structure
4 仿真结果及分析

四旋翼飞行过程中受到的慢时变外界气动干扰力和干扰力矩分别为:
这里干扰的周期根据实际气流运动情况进行选择。位置跟踪控制器参数为c1=5,λ1=5,γ1=5,γ2=0.1。
姿态子系统控制器参数整定结果为X1=diag[1,2,3],c2=2。仿真结果如图3 ~图5 所示。
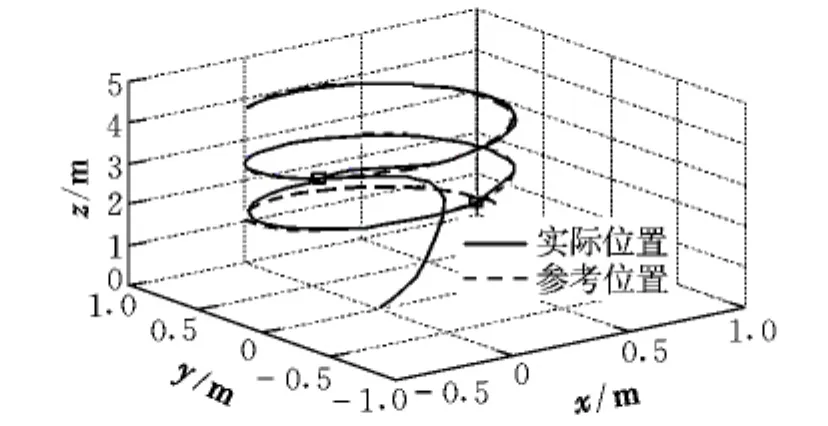
图3 位置跟踪三维效果Fig.3 Position tracking effects of 3D
从图3的三维飞行效果可以看出,实际飞行路径快速跟踪到期望的参考位置,完成了高精度的螺旋上升大机动飞行任务。图中,正方形点表示质量变化时刻。
图4是没有非线性观测器对干扰力矩进行观测的情况,此时输入转矩中不包含对干扰力矩的补偿项,姿态角跟踪效果较差。图4(a)和图4(b)为姿态子系统对中间指令信号θd和φd的跟踪效果,图4(c)为对指令发生器中给出的偏航角指令信号ψd的跟踪效果。
有干扰观测器补偿外界干扰的情况下,图5给出了姿态子系统对中间指令信号的跟踪效果。与图4对比可以发现,跟踪的精度显著提高,系统鲁棒性增强。
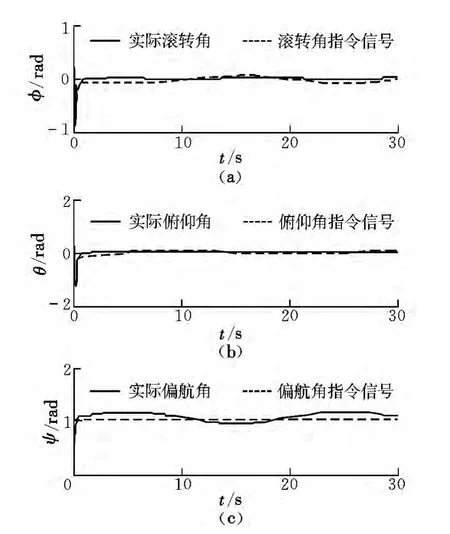
图4 没有补偿的姿态跟踪效果Fig.4 Attitude tracking effect without compensation

图5 有干扰补偿的姿态跟踪效果Fig.5 Attitude tracking effects with compensation
5 结束语
针对欠驱动的四旋翼无人机,设计了一种高精度的轨迹跟踪鲁棒控制算法。通过自适应策略,克服了位置子系统中质量不确定性和气动干扰力的影响。设计了一个新颖的非线性干扰观测器,使得姿态子系统快速跟踪中间指令信号,同时克服外界气动干扰力矩和惯性矩阵不确定性。理论分析和仿真结果都表明,所设计的控制器能够提升飞行控制系统的抗干扰能力,增强了鲁棒性。这种基于干扰观测器的鲁棒控制策略对于其他飞行器克服外界气流干扰也具有较好的参考意义。
[1] Abdessameud A,Tayebi A.Global trajectory tracking control of VTOL-UAVs without linear velocity measurements[J].Automatica,2010,46(6):1053-1059.
[2] 第五鹏杰,杨树兴.四旋翼飞行器全局动态鲁棒性跟踪控制[J].北京理工大学学报,2013,33(5):505-509.
[3] Lee D B,Nataraj C,Burg T C,et al.Adaptive tracking control of an underactuated aerial vehicle[C]//American Control Conference(ACC).San Francisco,California:IEEE,2011:2326-2331.
[4] Yang K S,Cheng CC.Robust Adaptive controller design for a quadrotor helicopter[J].Applied Mechanics and Materials,2013,284:2296-2300.
[5] Pounds P E I,Bersak D R,Dollar A M.Stability of smallscale UAV helicopters and quadrotors with added payload mass under PID control[J].Autonomous Robots,2012,33(1-2):129-142.
[6] Xu R,ÖzgünerÜ.Sliding mode control of a class of underactuated systems [J].Automatica,2008,44(1):233-241.
[7] Gong X,Hou Z C,Zhao C J,et al.Adaptive backstepping sliding mode trajectory tracking control for a quadrotor[J].International Journal of Automation and Computing,2012,9(5):555-560.
[8] Raffo G V,Ortega M G,Rubio F R.An integral predictive/nonlinear H∞control structure for a quadrotor helicopter[J].Automatica,2010,46(1):29-39.
[9] Nicol C,Macnab CJ B,Ramirez-Serrano A.Robust adaptive control of a quadrotor helicopter[J].Mechatronics,2011,21(6):927-938.
[10] Das A,Lewis F,Subbarao K.Backstepping approach for controlling a quadrotor using Lagrange form dynamics[J].Journal of Intelligent and Robotic Systems,2009,56(1-2):127-151.
[11] Zuo Z.Trajectory tracking control design with commandfiltered compensation for a quadrotor[J].Control Theory and Applications,IET,2010,4(11):2343-2355.
[12]白永强,刘昊,石宗英,等.四旋翼无人直升机鲁棒飞行控制[J].机器人,2012,34(5):519-524.
[13] Luque-Vega L,Castillo-Toledo B,Loukianov A G.Robust block second order sliding mode control for a quadrotor[J].Journal of the Franklin Institute,2012,349(2):719-739.
[14] Hoffmann G M,Huang H,Waslander SL,et al.Precision flight control for a multi-vehicle quadrotor helicopter testbed[J].Control Engineering Practice,2011,19(9):1023-1036.
[15] Bouabdallah S.Design and control of quadrotors with application to autonomous flying[D].École Polytechnique Federale de Lausanne,2007.
[16] Khalil H K,Grizzle J W.Nonlinear systems[M].Upper Saddle River:Prentice hall,2002:218-222.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
学生天地(2020年3期)2020-08-25 09:04:16
电子制作(2019年9期)2019-05-30 09:41:48
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56