基于SDRE法的非线性鲁棒滑模末制导律设计
2015-12-28 08:38:50朱战霞马岩毛正阳唐必伟
飞行力学 2015年4期
朱战霞,马岩,毛正阳,唐必伟
(1.西北工业大学 航天学院,陕西 西安710072;2.航天飞行动力学技术国家级重点实验室,陕西 西安710072)
0 引言
满足成本和性能要求是航天器设计的基本原则,为了降低发射成本,总是力求航天器质量尽可能轻。一般地,燃料占质量的相当比例,因此应尽可能使航天器执行任务所需的燃料最少。对于大气层外动能拦截器,从平台发射之后,在制导控制系统作用下,拦截器飞达目标并对目标实施直接碰撞杀伤。拦截过程中燃料消耗取决于控制系统性能和所采用的制导方案,燃料最省的制导方案可以有效减少拦截器质量,从而降低地面发射成本。然而基于视线坐标系建立的动能拦截器末制导段动力学模型虽然物理意义明显,但却具有强非线性特性,导致经典制导律设计方法不适用,同时考虑到目标躲避机动及各类偏差和外扰,致使满足拦截精度要求的制导律设计困难。
为了解决以上问题,国内外不少学者进行了研究。其中针对非线性系统最优制导问题,状态相关黎卡提方程法(SDRE)[1]不失为一种有效的解决方法,相对于传统最优反馈制导律求解HJB(Hamilton-Jacobi-Bellman)方程十分困难的情况,SDRE非线性次优制导律求解简单,控制精度高,已有学者将该方法应用于制导律设计中。贾正望等[2]针对防空导弹的二维制导问题,设计了基于SDRE法的末制导律。文献[3]设计了一种基于SDRE法的最优滑模制导律。文献[4-5]基于SDRE控制理论,采用θ-D法求解次优控制律,分别针对航天器伴随轨道控制问题和三维空间弹目拦截问题进行了研究。虽然SDRE法可以用于非线性系统,但是当系统存在不确定项或者干扰项时,应用该方法求解最优解非常困难。
滑模控制具有对参数摄动的不变性和对外界干扰的鲁棒性,也在末制导律设计中得到了应用[6-9]。但是滑模控制的原理导致抖振问题不可避免,抖振会造成控制量在正负之间频繁切换,导致该方法工程实施困难。
本文以动能拦截器拦截大气层外大机动目标为对象,考虑系统非线性和不确定干扰,充分利用以上两种方法的特点,提出并研究了结合SDRE法和滑模法的末制导律设计方法。
1 基于视线系的弹-目相对运动模型
在视线坐标系[10]下建立拦截器与目标之间的相对运动模型[11]:

式中:r为视线坐标系下的拦截器和目标的相对距离;qε为视线倾角;qβ为视线偏角;atx,aty,atz为目标机动加速度矢量在视线坐标系三轴上的分量;amx,amy,amz为拦截器加速度矢量在视线坐标系三轴上的分量。
为了方便控制系统设计,将式(1)改写成状态方程的形式,设

则有:

式中:x为状态量;u为拦截器控制量;将目标机动视为干扰量δ,它们都是随时间的变化量。B(x)矩阵及C(x)矩阵为控制量u及干扰量δ的系数矩阵,是状态量x的函数。
以上状态方程中,视拦截器-目标的相对距离、视线倾角及视线偏角为被控状态量,既能完整地表达相对接近问题,又不会引入绝对坐标信息,简化了数值解算的复杂度。显见,该方程为非线性方程,其中的目标机动项为不确定项,因此该方程表示的系统是带有不确定干扰项的非线性系统。
2 基于SDRE法和滑模控制的设计方法
一般地,考虑扰动及不确定项的非线性系统状态方程可表示如下:

式中:系统状态量x∈Rn;控制量u∈Rm;f(x),g(x)为由状态量x组成的非线性系统的函数。假设系统(3)中的不确定项,则系统可以表示为:


式中:a0,a1为正常数;‖˙‖表示欧几里德范数。
对于式(4)所描述的系统,本文考虑充分利用SDRE法和滑模控制的特点进行最优控制的设计。首先,不考虑干扰,即在δ=0的情况下基于SDRE理论求解系统的解。然后在此基础上,考虑不确定干扰项,即δ≠0,采用滑模控制进行补偿。具体过程如下。
2.1 基于SDRE的最优控制
假设δ=0,非线性系统的状态方程为:

令u=ucon,并称ucon为标称系统(不考虑干扰)的最优控制量。取系统(6)的控制能量消耗最小作为性能指标,即

式中:Q(x)∈Rn和R(x)∈Rm为系统性能指标中含有状态量x项的权重矩阵,Q(x)为半正定矩阵,R(x)为正定矩阵。
基于SDRE理论,即基于状态量的黎卡提方程的思想,将非线性动力学方程转换为系数矩阵含有状态量的状态方程,其与LQR控制具有同样的鲁棒性。将式(6)中的f(x)表示为A(x)x,将g(x)表示为B(x),则状态方程就可表示为基于SDRE理论的状态方程:

系数矩阵 [A(x) B(x)]对于x逐点可控,则满足最优性能指标的最优控制ucon为:
其中矩阵P(x)通过以下黎卡提矩阵代数方程求得:
对于SDRE法设计过程中的可控性问题,选择合适的系数矩阵A(x)对系统的可控性有比较大的影响。如果对于任意状态量,系统中[A(x) B(x)]需逐点可控,令S4=[B(x) A1(x)B(x) …,即有 rank(S4)=n,则本文所设计的非线性鲁棒系统可控。
2.2 基于滑模控制的干扰补偿
以上结果是在δ=0的情况下得到的,下面考虑当δ≠0的情况。
为了补偿非线性系统(4)中的不确定项,选择控制律为:

式中:uunc为针对系统外扰及参数不确定性的滑模控制补偿量。若求得式(11),即可得到考虑干扰的最优制导律,前面已经设计具有最优性能的控制ucon,因此这里需要设计补偿量uunc。
基于滑模控制思想,首先选择滑模面为:

本文设计积分滑模面如下所示:

这里,G(x)∈Rm×n,G(x)B(x)满秩非奇异,不考虑系统外扰动,当t=0时,s(0,x(0))=0,这样系统运动点总是从滑模面出发,对s求导:


与基于SDRE设计的最优控制相比,式(9)和式(15)完全相同,这也证明了本文选择的滑模面是鲁棒最优的。
考虑系统外扰项,选择uunc为:

式中:参数η为正常数。

将式(4)代入,得:

将式(16)代入式(18),得:


本文研究的末制导问题中,C(x)=-B(x),则:
考虑式(5),得:

分析式(22),s的1-范数‖s‖1是大于0的,则-η‖s‖1<0,有‖s‖ < ‖s‖1,则式(22)中后半项,则,证明了系统的稳定性。
3 拦截器末制导律设计
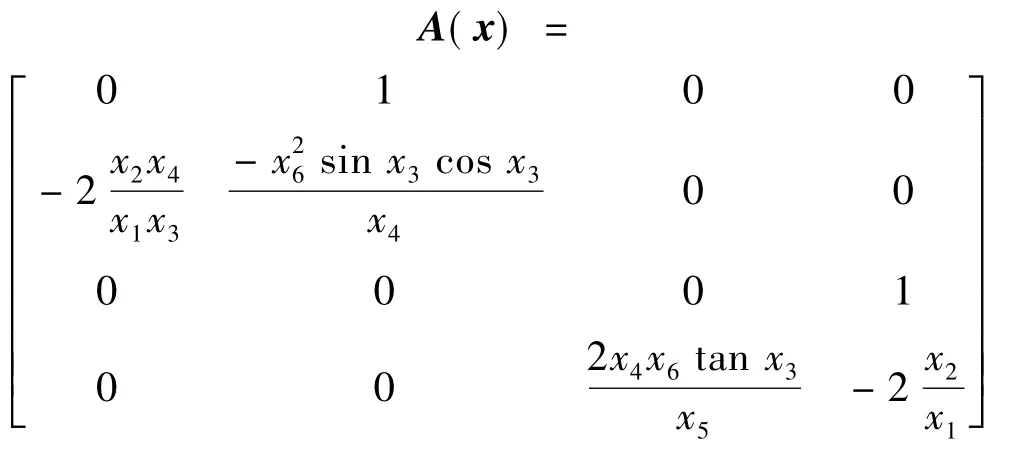
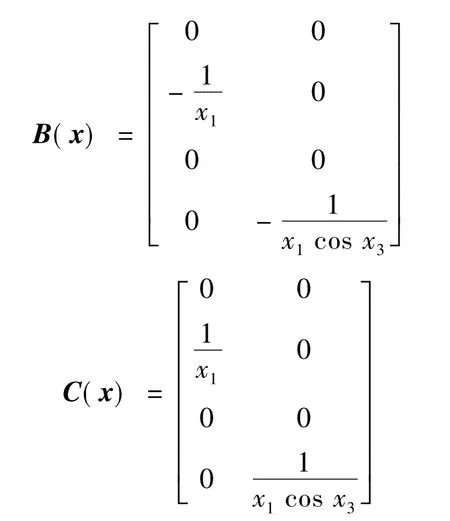
针对拦截器末制导律设计问题,应用以上方法时,首先需要将状态方程式(2)改写为如下形式:

由于在视线方向不用控制,因此式(23)的前两式在仿真中只需参加循环计算,则状态量变为x=,去掉前两式后,式(23)各系数矩阵的表达式为:
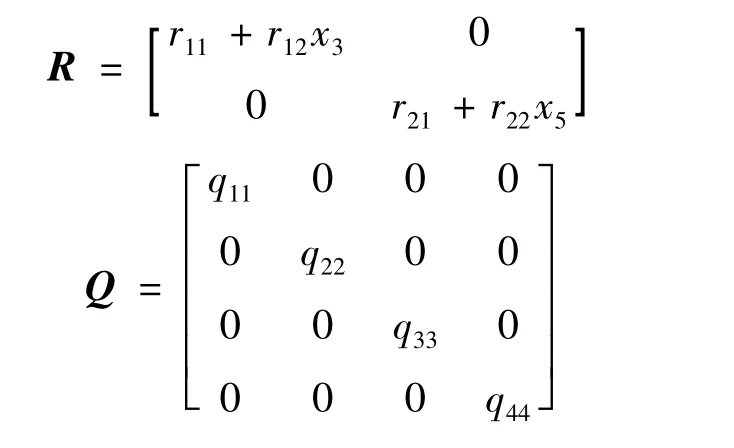
则可以直接利用本文方法进行末制导律的设计,其中两个系数矩阵R和Q设计如下:
4 仿真验证结果及分析
为了验证本文设计的末制导律的性能,在相同条件下,将仿真结果与以下自适应滑模末制导律比较[12]:

4.1 单次仿真结果
体现制导性能的主要参数就是视线角变化率和脱靶量,前者与拦截过程中需用过载相对应,后者说明了拦截精度。仿真计算得到基于SDRE法的非线性鲁棒滑模末制导律的脱靶量为0.132 5 m,燃料消耗为11.906 kg,而自适应滑模末制导律的脱靶量为0.416 8 m,燃料消耗为12.983 kg,表明本文所提出并设计的末制导律脱靶量更小,制导精度更高,且燃料消耗更少。图1和图2给出两种制导律下的视线倾角变化率和视线偏角变化率。其中,ASMG代表自适应滑模末制导律;OSMG代表本文设计的基于SDRE法的非线性鲁棒滑模最优末制导律。
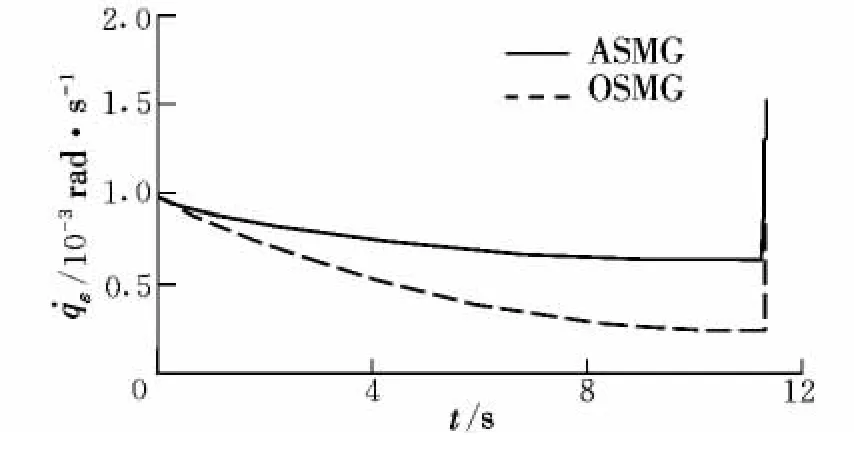
图1 视线倾角变化率Fig.1 Changing rate of line of sight lnclination angle

图2 视线偏角变化率Fig.2 Changing rate of line of sight deflection angle
由图1和图2可以看出,基于SDRE法的非线性鲁棒滑模末制导律的视线角速率在前段变化较快且很快减小并逐渐趋于较小的值,说明弹道前段充分利用了机动性而弹道末段比较平直,有利于精确控制以减小脱靶量。
4.2 蒙特卡洛打靶仿真结果
在末制导段进行蒙特卡洛打靶仿真,误差源及其误差选值范围和分布规律如表1所示,打靶次数n=100次。其中正态分布N(0,σ2),选取均值为0,标准差σ=0.5。两种末制导律下,蒙特卡洛打靶的脱靶量分别如图3和图4所示。
表1 误差源及其分布规律Table 1 Distribution of error sources

图3 自适应滑模末制导律脱靶量分布Fig.3 Missed distance of ASMG
图4 非线性鲁棒滑模最优末制导律脱靶量分布Fig.4 Missed distance of OSMG
统计结果为:ASMG法的CEP误差为0.225 m,脱靶量均方差为0.030 5 m;OSMG法的CEP误差为0.138 2 m,脱靶量均方差为0.008 55 m。进一步说明了基于SDRE法的非线性鲁棒滑模最优末制导律脱靶量更小,制导精度更高。
5 结束语
在保证制导精度的前提下,拦截器燃料消耗的减少对于其总体优化设计以及航天器作为有效载荷从地面发射时的成本减小意义重大。本文正是基于此考虑,研究了基于SDRE法解决非线性系统的理论基础,并将滑模变结构控制与其结合,设计了基于SDRE法的非线性鲁棒滑模末制导律,仿真结果表明了该制导律的可用性和优越性能。
[1] Tayfun Cimen.State-dependent riccati equation(SDRE)control:a survey[C]//Proceedings of the 17th International Federation of Automatic Control World Congress.Seoul,South Korea,2008:3761-3775.
[2] 贾正望,穆育强,郭治.基于SDRE方法的制导律设计与仿真研究[J].系统仿真学报,2010,22(1):135-143.
[3] Seyyed Sajjad Moosapour,Ghasem Alizadeh,Sohrab Khanmohammadi,et al.A novel nonlinear robust guidance law design based on SDRE technique[J].International Journal of Aeronautical and Space Science,2012,13(3):369-376.
[4] 罗建军,周文勇,袁建平.基于θ-D非线性控制方法的伴随轨道控制[J].中国空间科学技术,2009,4(2):1-7.
[5] 王祥,方群.一种基于θ-D次优控制的三维末制导律设计[J].西北工业大学学报,2012,30(2):196-200.
[6] Babu K R,Sarmah J G.,Swamy K N.Switched bias proportional navigation for homing guidance against highly maneuvering targets[J].Journal of Guidance,Control,and Dynamics,1994,17(6):1357-1363.
[7] 郭建国,周军.基于双幂次趋近律的变结构末制导律[J].飞行力学,2010,28(5):55-58.
[8] 汤一华,陈士橹,徐敏,等.基于Terminal滑模的动能拦截器末制导律研究[J].空军工程大学学报,2007,8(2):22-25.
[9] 时建明,王洁,刘少伟.大气层外末段拦截变结构制导律设计[J].电光与控制,2009,16(11):92-97.
[10]范玉洁.空间拦截器制导与控制技术研究[D].南京:南京航空航天大学,2012.
[11] Chen Chun-Hone,Liang Yew-Wen,Liaw Der-Cherng,et al.Design of midcourse guidance laws via a combination of fuzzy and SMC approaches[J].International Journal of Control,Automation,and Systems,2010,8(2):272-278.
[12]周荻.寻的导弹新型导引规律[M].北京:国防工业出版社,2002:6-9.
猜你喜欢
制导与引信(2022年2期)2022-07-22 05:37:54
无人机(2022年2期)2022-05-20 06:43:32
轻兵器(2022年5期)2022-05-19 00:56:24
煤气与热力(2021年6期)2021-07-28 07:21:30
自动化学报(2019年6期)2019-07-23 01:18:18
北京航空航天大学学报(2017年1期)2017-11-24 05:22:30
自动化学报(2017年4期)2017-06-15 20:28:54
华东理工大学学报(自然科学版)(2015年3期)2015-11-07 09:17:16
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:42
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:20