
便携式遥控测量船自动导航系统设计与实现
2015-12-28 06:15袁国根
江西测绘 2015年1期
袁国根
(江西省水利规划设计院 江西南昌 330029)
便携式遥控测量船自动导航系统设计与实现
袁国根
(江西省水利规划设计院 江西南昌 330029)
通过对便携式遥控测量船自动导航系统的设计,采用电子罗盘辅助GPS导航的方式,实现了遥控船的自动导航。通过工程项目的实践进一步证明,自动导航系统均能实现预定的导航目标,实现自动化测量的目的。
电子罗盘;定点导航;定线导航;GPS导航
1 概述
随着科技的发展,自动化控制逐渐走入人们的生活,自动化导航也成为各行业追求的一种控制方法。目前传统的导航方式有激光导航、视觉导航、机械导航、电磁导航、超声波导航、GPS导航和基于多传感器的导航[1]。随着软、硬件系统的进一步发展和完善,自动导航系统在农业、船舶、水下测量中得到了广泛地应用。为提高水下测量的生产效率,便携式遥控测量船自动导航系统[2]也应运而生。由于遥控测量船作业距离比较大,方向不定,宜选用GPS导航或基于多传感器的导航。考虑便携式遥控测量船轻巧和实用性的要求,又不宜在船上安装太多传感器,一般仅考虑采用GPS导航和电子罗盘相结合的方式。
要实现便携式测量船的自动导航,便应该及时解算出船体的实际位置和船头的实际方向。船体定位数据可通过RTK测量精确获得[3-4],而船头的实际方向依赖于电子罗盘。但电子罗盘与RTK又分属不同的坐标系统,因此需要通过对电子罗盘的方向值进行标定,即求取电子罗盘各方向的补偿值。考虑到由于电子罗盘对其所处环境中的磁场较为敏感,若所处环境产生变化,则电子罗盘的补偿值也会随之改变,因而需要对电子罗盘进行现场标定。
研究表明,通过对电子罗盘的标定和校准,可得到船头的实际方向;通过GPSRTK技术,得到定位数据。进而通过获取的定位数据和船头实际行驶方向值,即时计算位置偏移和方向偏差,根据偏差发出相应的动作命令,进而控制相关外设工作(舵机和电机),实现便携式遥控测量船自动导航的目的。
2 自动导航系统设计
2.1 系统框架设计
便携式自动导航测量船包括硬件系统和软件系统,主要架构如下(图1):

图1 系统框架设计
2.2 硬件系统
硬件系统包括船体、岸基部分(遥控器)、动力系统(电机)、控制系统、数据传输系统、无线接收系统、测深仪、红外测距、GPS接收机和电子罗盘。遥控测量船上通过无线接收系统接收到岸上指令,根据指令,控制系统能控制舵机转向,且通过PLC控制电机动力系统工作,以实现船体的加速、减速和转向。
软件系统主要包括岸基处理软件、船载控制软件和PLC控制软件[5]。岸基控制系统的功能主要是接收遥控船的位置信息和状态信息数据,实时解算出坐标和方向,根据坐标和方向,计算偏移,并发出相应的指令。船载控制软件主要功能是整合各种数据,并将它通过无线传输系统发射给岸基处理软件;接收岸基指令,并根据指令指示硬件系统工作。PLC控制软件主要功能是通过指令指示电机加速、减速。
3 自动导航实现
3.1 自动导航实施过程
便携式测量船的自动导航系统实现过程主要有:电子罗盘标定和校准、船体位置计算、计算标准航向、确定转舵值(图2)。
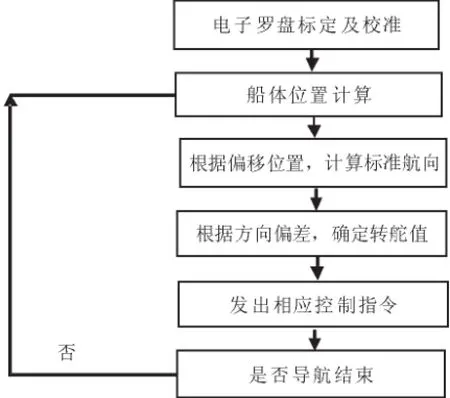
图2 自动导航实施过程
3.2 电子罗盘标定和校准
电子罗盘是一种辅助导航系统,为实现电子罗盘的辅助导航,必须经过标定和校准两个过程。
电子罗盘的标定:为了求出这些来自电路板的磁场干扰,必须将电子罗盘绕水平面旋转1圈,以取得固定磁场干扰矢量的大小及方向。
从古至今,描写大自然风光的文学作品不计其数,但更多的是借助对自然风景的描绘去抒发个人情感,把自然当作心灵的寄托,在作品中自然多为一种意象的存在,缺少对人与自然的关系的关注。“只有伴着现代工业和现代科学技术、物质文明迅速发展,人类生存与自然环境因形形色色的污染破坏而变得恶劣的严峻的今天,才应运而生当下新时代‘大自然文学'。”⑧刘先平最早提出“大自然文学”概念,也是我国最早的大自然文学创作者,刘先平所创作的大自然文学不同于以往,他是使用文学的方式唤醒人与自然的和谐统一关系,大自然文学是热爱生命的文学。
电子罗盘的校准:标定好的电子罗盘,经过初始值设置,取得零值与正北方向一致。
3.3 计算标准航向
3.3.1 定线导航
当船沿着航线运动时,其目标方向根据当前位置及其到航线的距离决定,如图3所示:

图3 标准航向示意图
P为测量船,直线a为设计航线,箭头为设计方向,直线b为范围线,测量船必须在a和b之间运行。L为范围宽度,d为船当前位置到航线的距离。
目标航向设计原则为:当船到航线的距离很近时,其目标航向接近航向且朝向航线运动;当船超出航行范围时,其目标方向为垂直于航线方向并朝向航线运动。目标方向与距离的具体关系如下:
φcur=φa±α
α=fabs[1/(15d/4L+0.25)-4]·2π/15
式中φcur为船当前位置的目标方向的方位角,φα为计划航线的航向方位角,当船处于航线左边时为加,右边时为减,α与d的关系如图(图4)。
图4显示为随着距离的增加,目标航向与航线方向的角度值之差的变化。
3.2.2 定点导航
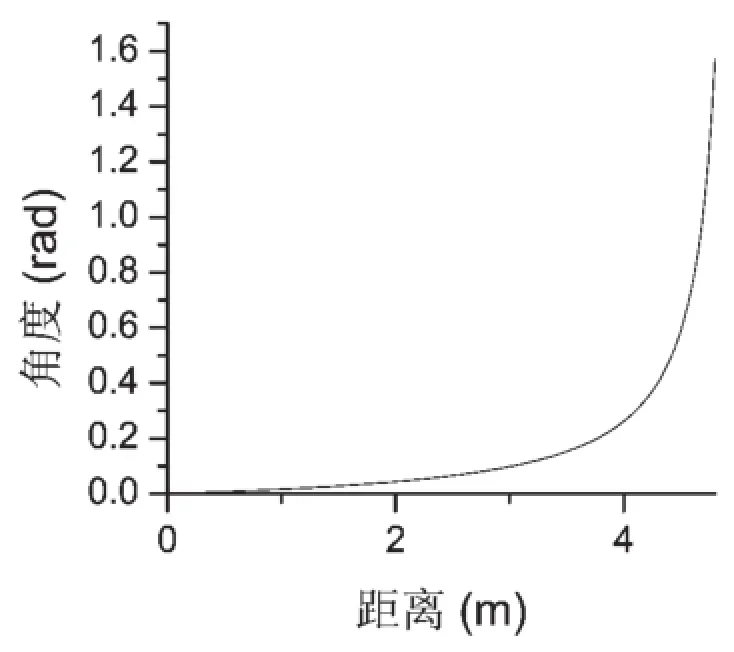
图4 标准角度偏差与距离关系图
目标航向为当前位置到目标点的方位角,计算方法如下:

式中,xt、yt为目标点的坐标,xc、yc为当前船的坐标。
3.4 确定转舵值
船体方向差由船体标准方向值和船体实际方向值的差值确定,通过船体方向差可计算转舵值的大小。可知,方向差相差越大,转舵值越大。最大转舵值决定船体的最小转弯半径,根据机械特性,舵机实际转舵值最大为45°。
通过多次实验情况,确定通过方向差计算转舵值的原则如下:
当航向与目标航向之间相差大于45°时,船舵机(左/右)转45°;当航向与目标航向相差小于45°时舵机旋转角度值与角度差成正相关。
旋转角度与航向差的具体关系如下:

式中β为舵机旋转方向,dα为当前航向与目标航向之差,其关系如图所示(图5):

图5 角度偏差与转舵关系图
图5 中当方向差很大时,舵机相应的转大角度,当方向差较小时,舵机旋转较小值以起到微调作用。
3.5 综合导航
如上所述,导航方法包括定线导航和定点导航,对于定线导航,需要如下操作:船当前位置朝着航线起始位置定点导航--->到达起始点--->通过定点导航(目标点为航线上距起始点一定距离的点)调整船的航行方向使其运行方向与航线方向接近,从而使船平滑的进入定线导航。
4 工程应用
某项目为圩堤除险加固工程测量,该段长度约1公里,测量工作包括水下和岸上。为给设计部门提供准确的水下地形资料,该段水下测量采用便携式自动导航遥控测量船进行施测。遥控测量船可以靠近河岸进行测量,可以克服大船无法靠近岸边的缺陷,可为设计部门进行方量计算提供更准确的资料。
实验表明,当GPS精度误差为0.05米时,导航测量点与航线的平均偏差为0.2米。经过进一步验证,当自动导航模式为定线导航时,遥控测量船可以按照预定的航线进行施测,在寻找航线端点时,由于船行驶方向与导航方向的偏差较大,此时调整航向时,轨迹点与航线之间的偏差值较大,经过量测发现,离航线最大偏离为0.66米,满足自动导航的要求。当测量模式为定点导航时,此时,标准方向均指向目标点,满足自动定点导航要求(图6、图7)。
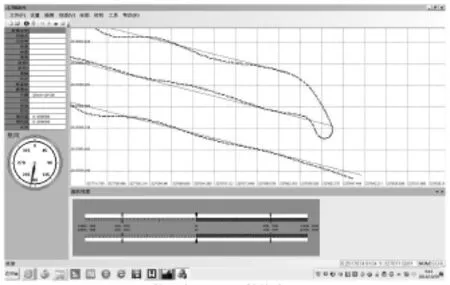
图6 导航程序界面及导航轨迹

图7 导航地形图
5 结束语
便携式遥控测量船自动导航系统为自动化测量提供了可靠的保证,可节约生产成本,提高生产效率。根据实际情况,遥控船在有风浪的情况下,仍能够保持较好的稳定性,可确保仪器、设备和人身财产安全,为大规模推广创造了良好的条件。便携式水域地形测量自动化采集系统的实现将填补小型水库、枯水期浅水道测量、乱水区大比例航道测量、狭窄水域整治、工程施工中填挖方计算工程测量中自动化水深采集的空白;彻底解决危险水域水下测量、应急区域水下测量的危险和难题;提升施工测量水下自动化采集的能力,减轻职工劳动强度,降低维护成本,对未来水下测量将产生深远的影响。
[1]蒋浩然,陈军,王虎,雷王利、袁池,移动机器人自动导航技术研究进展[J].西北农林科技大学学报(自然科学版),2011(12)
[2]林旭波,丁继胜,唐秋华.基于GPS高精度定位的便携遥控水上测量船技术研究及集成[J].测绘通报,2012(S1).
[3]颜早璜.GPS和测深仪组合在某码头前沿水域水下地形测量中的应用[J].西部探矿工程,2014,26(3):125-126.
[4]杜飞,王淼.解析水下测绘中CORS的网络RTK技术的应用[J].技术与市场,2014,21(3):19-19.
[5]求是科技.8051系列单片机C程序设计完全手册[M].北京:人民邮电出版社,2006.
猜你喜欢
环球时报(2022-08-15)2022-08-15
军事文摘(2021年22期)2022-01-18
新世纪智能(高一语文)(2021年3期)2021-07-16
民用飞机设计与研究(2019年4期)2019-05-21
智富时代(2017年7期)2017-09-05
智富时代(2017年7期)2017-09-05
作文·初中版(2017年2期)2017-03-06
电子制作(2017年24期)2017-02-02
新闻传播(2015年9期)2015-07-18
发明与创新(2015年25期)2015-02-27
