
基于部件分解的高分辨雷达目标提取方法
2015-12-28 01:03:52段佳,吴亿锋,张磊等
电波科学学报 2015年4期
基于部件分解的高分辨雷达目标提取方法
段佳吴亿锋张磊邢孟道 黄大荣吴敏
(西安电子科技大学 雷达信号处理国家重点实验室,陕西 西安 710071)
摘要针对传统目标提取算法在低信噪比条件下性能不理想且提取部件不连续的问题,提出一种基于部件分解的高分辨雷达目标提取算法. 利用属性散射中心可以表征目标部件的散射回波的优势,通过构造属性散射中心基对目标信号进行分解. 通过对分解部件的能量设置门限,提取属于目标的部件. 实验结果证明:在低信噪比且虚警概率相同的情况下,基于部件分解的目标提取方法比传统基于像素能量的提取方法能提取出更多且更连续的目标部件.
关键词雷达目标提取;目标分解;属性散射中心;恒虚警率
中图分类号TN929.5
文献标志码A
文章编号1005-0388(2015)04-0679-07
AbstractIn order to overcome the problems encountered by traditional radar target extracting method, a radar target extracting method based on the decompositions of assemblies is proposed for high-resolution radar images. Since the attributed scattering center model is capable to represent the electro-magnetic behaviors of manmade assemblies, it is advisable to decompose the radar signal into assemblies. Then, by setting a constant-false-alarm-rate threshold to the energy of decomposed assemblies, assemblies belonging to the target are determined. Experimental results validate the superiority of the proposal over the traditional method under low signal-to-noise ratio environment with same constant-false-alarm-rate probabilities. Moreover, the integrities of assemblies is enhanced.
收稿日期:2014-09-16
作者简介
A target extracting method based on decomposition of
components for high-resolution radar images
DUAN JiaWU YifengZHANG LeiXING MengdaoHUANG DarongWU Min
(NationalKeyLaboratoryofRadarSignalProcessing,XidianUniversity,
Xi’anShaanxi710071,China)
Key words rdar target extraction; target decomposition; attributed scattering centers; constant-false-alarm-rate (CFAR)
资助项目: 国家自然科学基金(61301280); 国家自然科学优秀青年基金(61222108); "973"项目(2010CB731903); 国家自然科学青年基金(61101245)
联系人: 段 佳 E-mail: bifiduan119@126.com
引言
雷达目标提取技术对雷达信号处理至关重要,它是雷达目标识别、分类和特征提取等工作的前提. 在实际电磁环境中,雷达接收目标回波复杂,来自太空和地面的电磁干扰严重污染目标信号. 雷达目标提取技术是指从复杂的电磁背景环境中提取出目标信号. 对于传统低分辨雷达,雷达目标由少数散射点组成[1],采用基于像素能量的恒虚警(Constant-False-Alarm Ratio,CFAR)提取算法即可有效地分离目标和背景[2]. 但随着雷达技术的发展,现代高分辨雷达通过发射长相干积累时间和宽带宽的信号提高分辨率[3],从而获取更多的目标信息. 但高分辨率也给目标提取带来了困难:由于目标由多个散射点组成,回波能量分散,单个分辨单元内的信号信噪比低,传统的基于像素能量的CFAR提取方法效果不理想.
利用同一部件像素之间具有相关性,本文提出一种基于部件级分解的雷达目标提取算法.主要针对卫星、飞机、坦克和车辆等人造目标,这些目标往往由简单的部件组成,例如圆柱、球、平面和二面角等.而这些基本部件的雷达散射回波信号可以从几何绕射和物理光学的角度进行预测[4]. 例如,属性散射中心模型便可通过少量参数的不同组合来表征不同部件的电磁散射回波[5]. 基于属性散射中心模型对雷达目标信号进行部件级分解,然后通过对提取部件的能量设置门限可有效区分目标部件和噪声及背景杂波. 与传统基于像素能量的目标提取算法[6]不同,基于部件能量的目标提取算法可以更有效地区分噪声和弱的分布式散射部件. 这是因为,噪声随机分布在雷达图像上,噪声像素之间不具有相关性,而目标部件的像素之间具有相关性,对目标进行部件级的分解可有效地区分噪声和雷达目标部件. 另外,一些分布式散射部件在雷达图像上往往占据一些像素,这些像素能量较低但部件整体能量高,因此通过对部件整体的能量进行CFAR提取便能有效地提取此类散射部件. 实验证明,在低信噪比且虚警门限相同的情况下,基于部件能量的目标提取算法能提取出更多更连续的部件.
1信号模型
对于部件的模型,已有学者从电磁散射特性出发建立了典型部件的参数化模型. 典型的电磁散射参数化模型包括指数衰减模型[7]、几何绕射模型[8]和属性散射中心模型[4]. 其中,属性散射中心模型从几何绕射和物理光学的角度出发,用一组参数表示形如球、圆柱、二面角、三面角和边缘绕射等基本电磁散射部件. 本文采用属性散射中心模型对雷达目标进行部件级分解.
结合雷达实际工作条件,对属性散射中心模型进行化简以减少运算量、提高算法效率[9],简化后的属性散射中心模型为

(1)

假设目标由P个属性散射中心组成,则目标回波信号可以表示为
e(f,φ).
(2)
式中: S(f,φ)表示带噪声的雷达目标总回波信号; e(f,φ)表示加性高斯白噪声.
2高分辨雷达目标提取技术
传统目标提取算法认为目标是由若干个散射点构成,通过对像素能量设置门限提取目标,忽略了部件像素之间的整体性.在低信噪比的条件下,强噪声随机分布于各像素,分布式散射部件规律分布于一些像素,容易被强噪声淹没,导致传统的目标提取算法效果不理想.若将目标视为若干部件的组合,而部件像素间具有相关性,对目标进行部件级分解能有效提高在低信噪比下目标与噪声的可分性.
2.1基于部件的目标信号分解
(3)
Θp={Lp,φ0p,xp,yp}.采用传统的RELAX迭代算法[10]可以很好地求解如式(3)的参数估计问题,但是由于参数估计维度高运算复杂,需提出一种改进的参数估计求解算法以提高效率.
注意到,属性散射中心的相位表示与点散射模型一致,因此可采用傅里叶变换(FourierTransform,
FT)对位置参数进行快速求解.
首先,构造新的不含相位的基函数,形如
(4)



(5)
利用迭代方法快速估计参数的具体流程如下:


重复上述操作,迭代至收敛. 收敛条件为相邻两次估计信号的能量差小于预设门限,一般为原始信号能量的1%.
在多通道极化数据已知的情况下,可以联合极化通道进行参数估计. 由于各极化通道下的属性参数{L,φ0,x,y}相同,差别仅在幅度,因此可联合多极化通道进一步提高参数估计精度. 参考已有文献,联合多通道参数估计只需将式(5)的l1范数替换为l2/1范数[11].
2.2基于部件能量的目标提取
传统的基于像素能量的CFAR目标提取算法需要先确定目标的大致能量支撑区,然后选择远离目标支撑区的单元作为噪声样本,估计噪声方差设计CFAR检测器[12]. CFAR检测器的门限可表示为
α=emη.
(6)
式中:em表示噪声样本的能量均值;η为对应CFAR的固定常数,可直接调用软件工具包进行计算.
不同于传统的目标提取算法,基于部件的目标提取主要区别如下:
首先,噪声样本的估计不需要再确定目标的大致能量区. 这是因为通过对目标信号进行分解后,认为残余的信号为噪声样本,因此,噪声样本的幅度均值只需对残余信号的幅度求均值即可.
其次,对分解的部件的能量应用式(6)的CFAR门限进行提取. 由于雷达目标,尤其是人造目标,往往由一些典型的散射部件构成,传统基于点散射模型的提取往往忽略了属于同一部件像素之间的整体相关性,导致在低信噪比下目标部件与随机分布的噪声难以区分,使得部件的像素出现误判,提取部件不连续的问题. 采用基于部件分解的目标提取算法将部件视为整体计算能量,有
Ep=|Sp(f,φ)|q,
(7)
对于单通道,q=1表示l1范数;对于多通道,q=1/2表示l2/1范数[14].
一般假定提取部件能量服从GΓ分布,即

x≥0,a,b,ν>0.
(8)
式中:a是尺寸参数;b是能量参数;ν是尺寸参数. GΓ分布是一个普适性的分布,不同的参数组合可以退化成指数分布(b=1,ν=1)、log分布(b→0,ν→∞)、瑞利分布(b=2,ν=1)和Weibull分布(ν=1)等.
利用最大似然均值(MaximumLikelihoodMean,MLE)估计参数. 最后,通过式(7)计算部件能量,利用式(6)的门限和式(8)部件能量的分布进行给定CFAR门限下的有效目标信号提取.
综上,基于部件的目标提取算法具体流程图如图1所示.
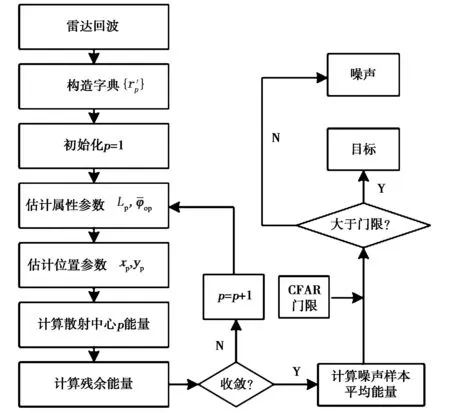
图1 算法流程
3实测数据处理及结果分析
3.1数据说明
采用XPatch仿真的挖掘机数据进行实验,该数据包含多个俯仰角度和全极化通道. 采用俯仰角度60°,方位观测角度范围为-10°~8.412 3°,频率变化范围为7.047 2~9.994 2GHz的一块数据进行实验. 该数据块具有较明显的分布式散射中心以及局部散射中心,能很好地说明算法的优越性. 为了方便,单通道统一采用HH极化通道数据. 而多通道的数据结果,可参考基于部件分解提取后的部件级Cameron分解[9].
对该数据采用距离多普勒(Range-Doppler,RD)成像,结果如图2(a)所示,可以看出该姿态下目标信号包含许多分布式散射中心和局部式散射中心,因此可以较为全面地评价算法性能.
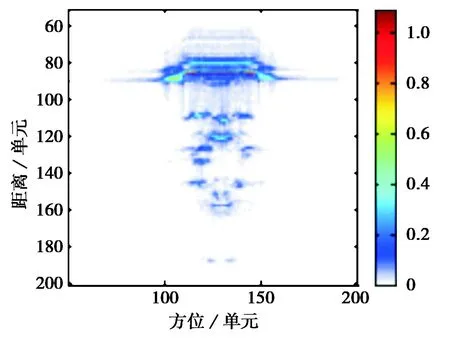
(a) 原始信号
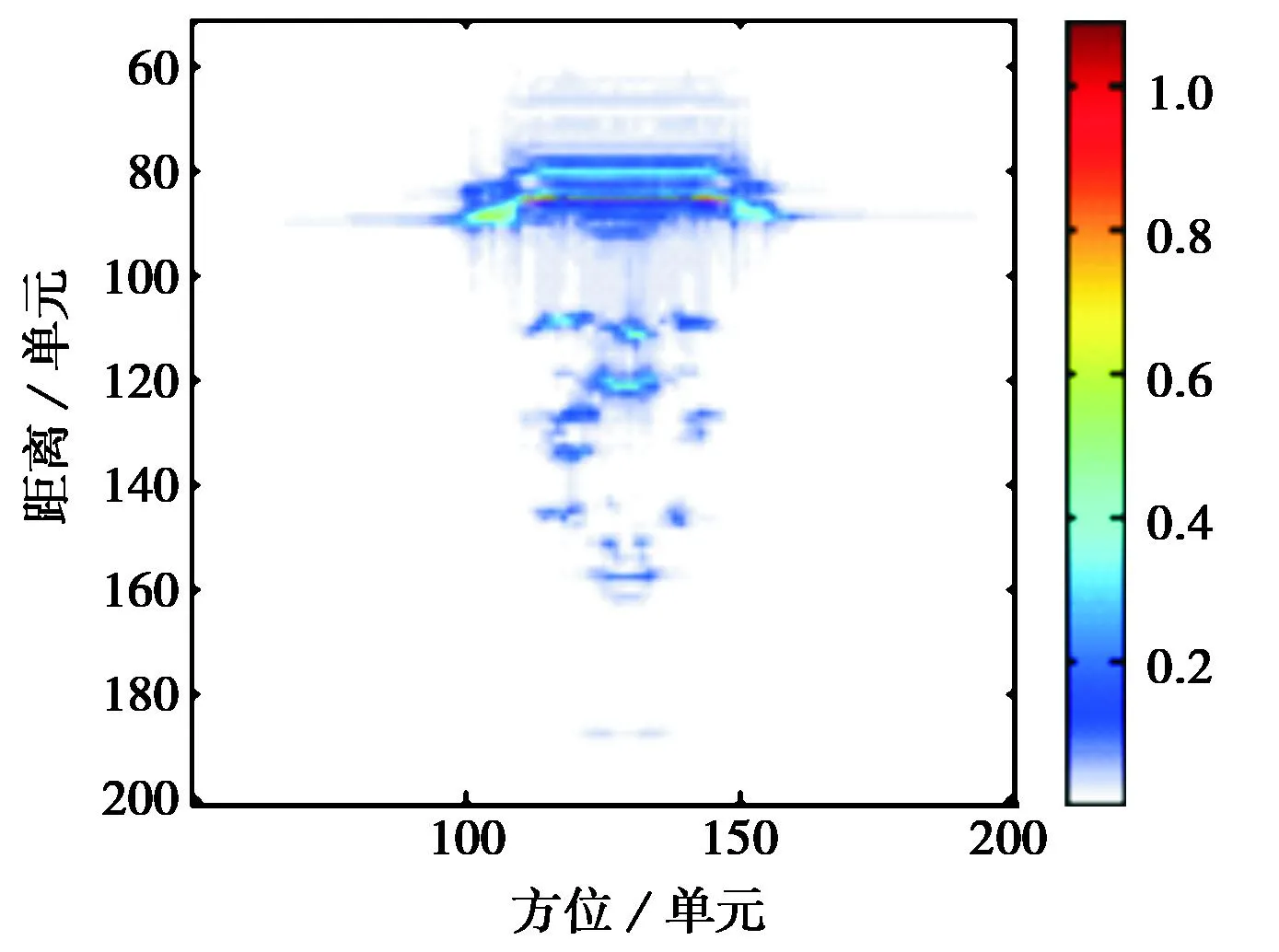
(b) 重构目标
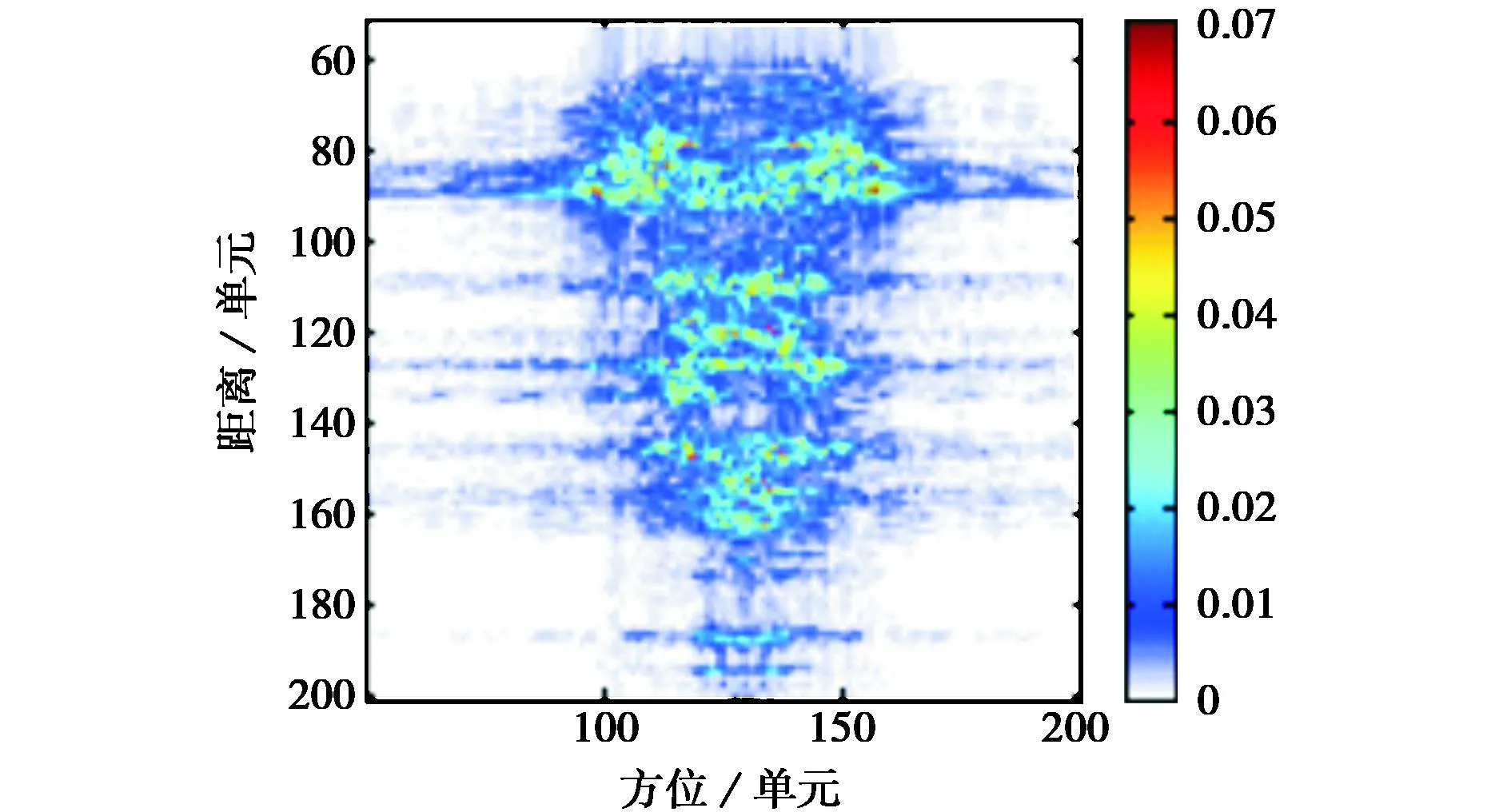
(c) 残余信号 图2 无噪声背景下基于部件的信号分解
利用属性散射中心模型对目标信号进行分解,重构信号和残差信号的RD成像,结果如图2(b)和(c)所示. 可以看出重构信号与原始信号基本一致、残差信号能量弱,因此可间接说明基于部件信号分解算法的有效性. 利用图2作为参考信号,通过对如图2(a)对应的原始信号添加服从高斯分布的随机噪声形成不同信噪比的数据. 利用传统提取算法和基于部件的目标提取算法,在不同信噪比下进行目标提取. 通过实验对比表明,所提方法在相同的虚警概率下能提取出更多的目标,且提取部件的完整性和连续性增强.
3.2实验结果与分析
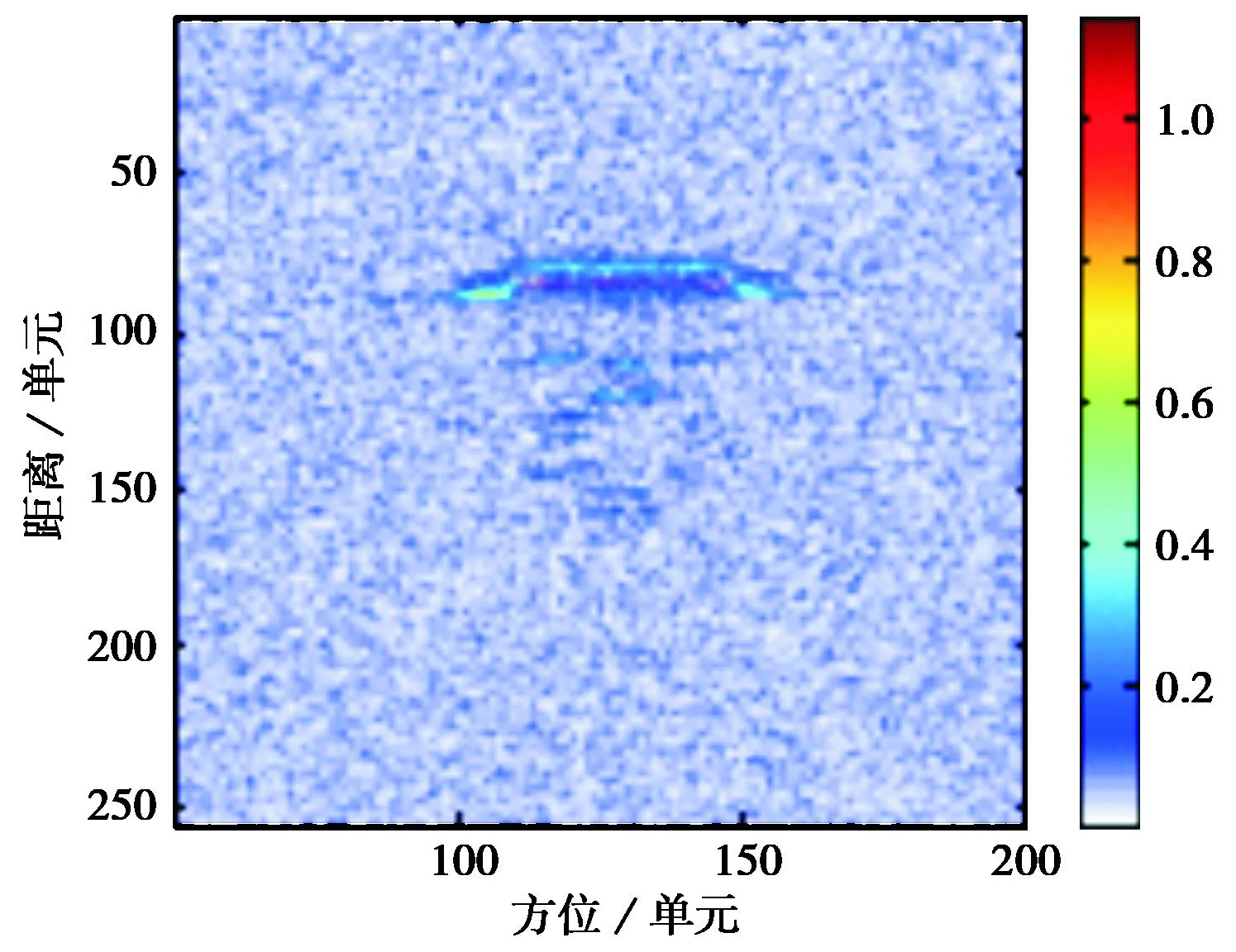
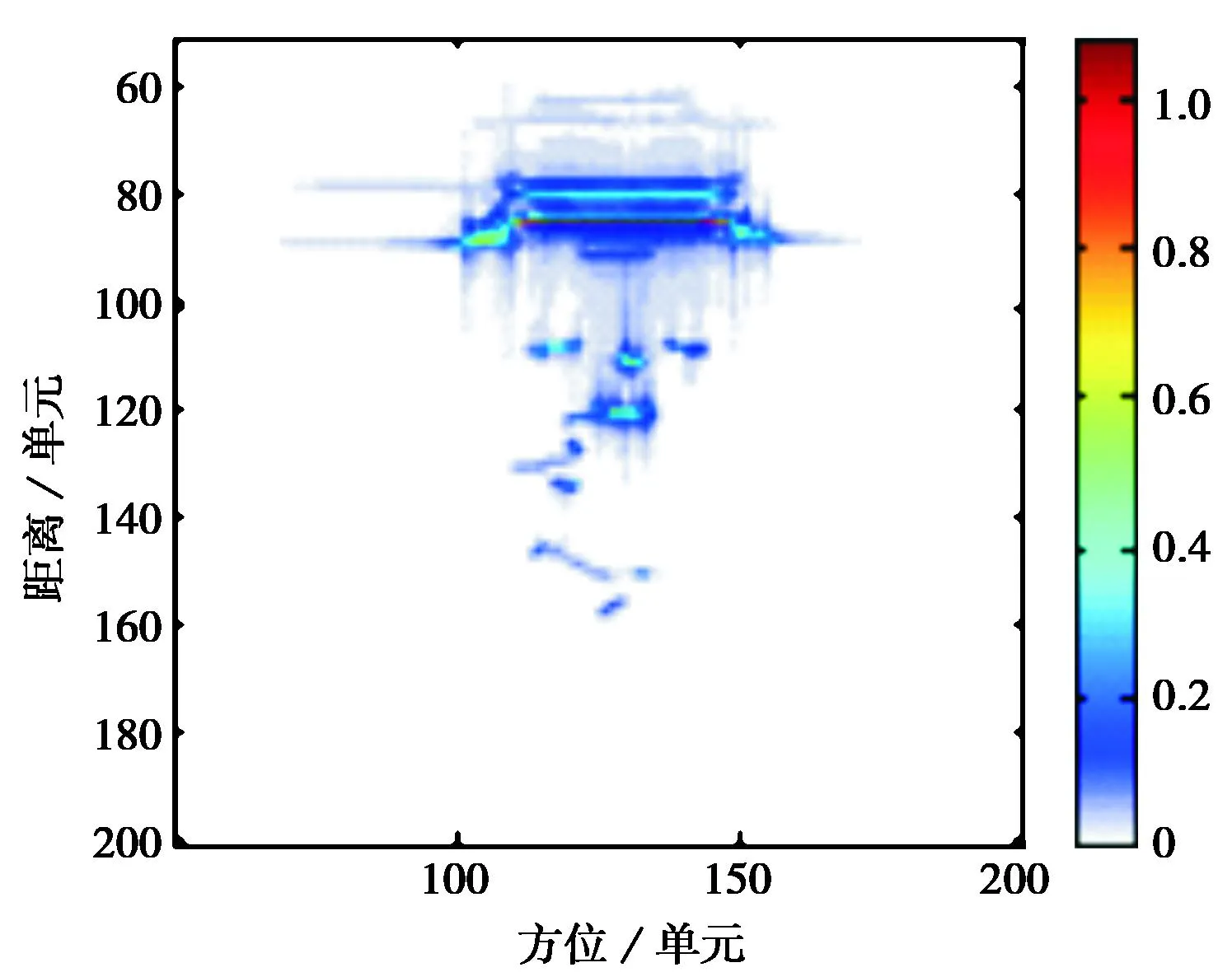
从理论分析部分可知,基于部件的目标提取算法在低信噪比下的优势更为明显.因此,在原始信号中添加随机高斯噪声使信噪比为0dB,RD成像结果如图3(a)所示. 可以看出,在此信噪比下有部分弱散射部件已被噪声淹没. 采用传统的基于像素能量的提取算法,取虚警概率为0.000 1,得到结果如图3(b)所示. 可以看出,有部分弱散射部件被漏检而部分噪声却被误检,另外,在挖掘机的头部线状结构已经出现不连续的情况. 这些问题与笔者讨论的基于像素能量的提取方法在低信噪比下出现的问题吻合. 为了解决这些问题,笔者利用基于部件的整体能量提取提高提取性能,在相同的虚警概率下,利用基于部件分解的提取结果如图3(c)所示. 对比图2(a)和图3(c),可以看出所提算法基本恢复了原始信号,并保证了部件的完整性,有效避免了部件间断问题的出现.
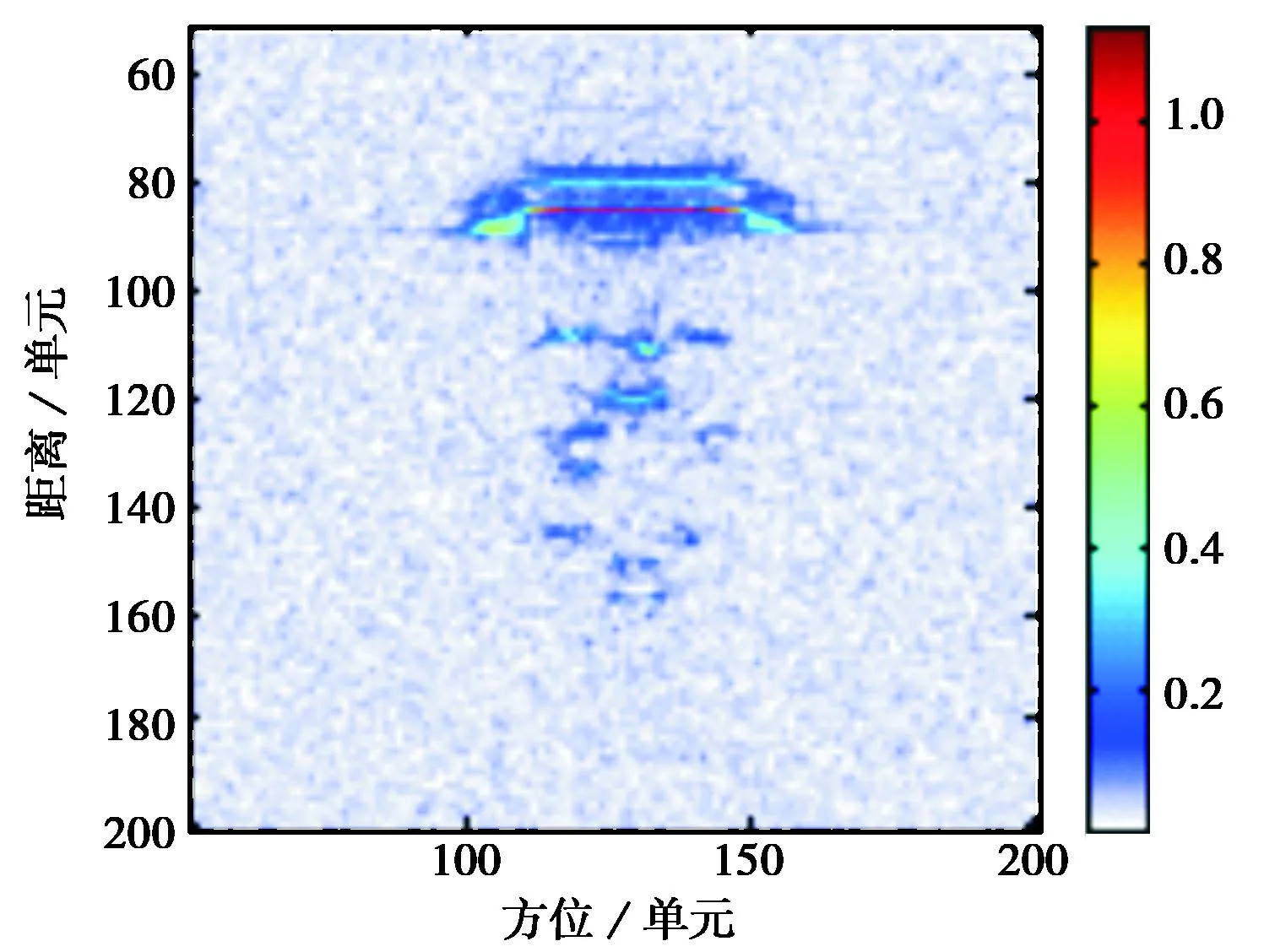
(a) 原始信号
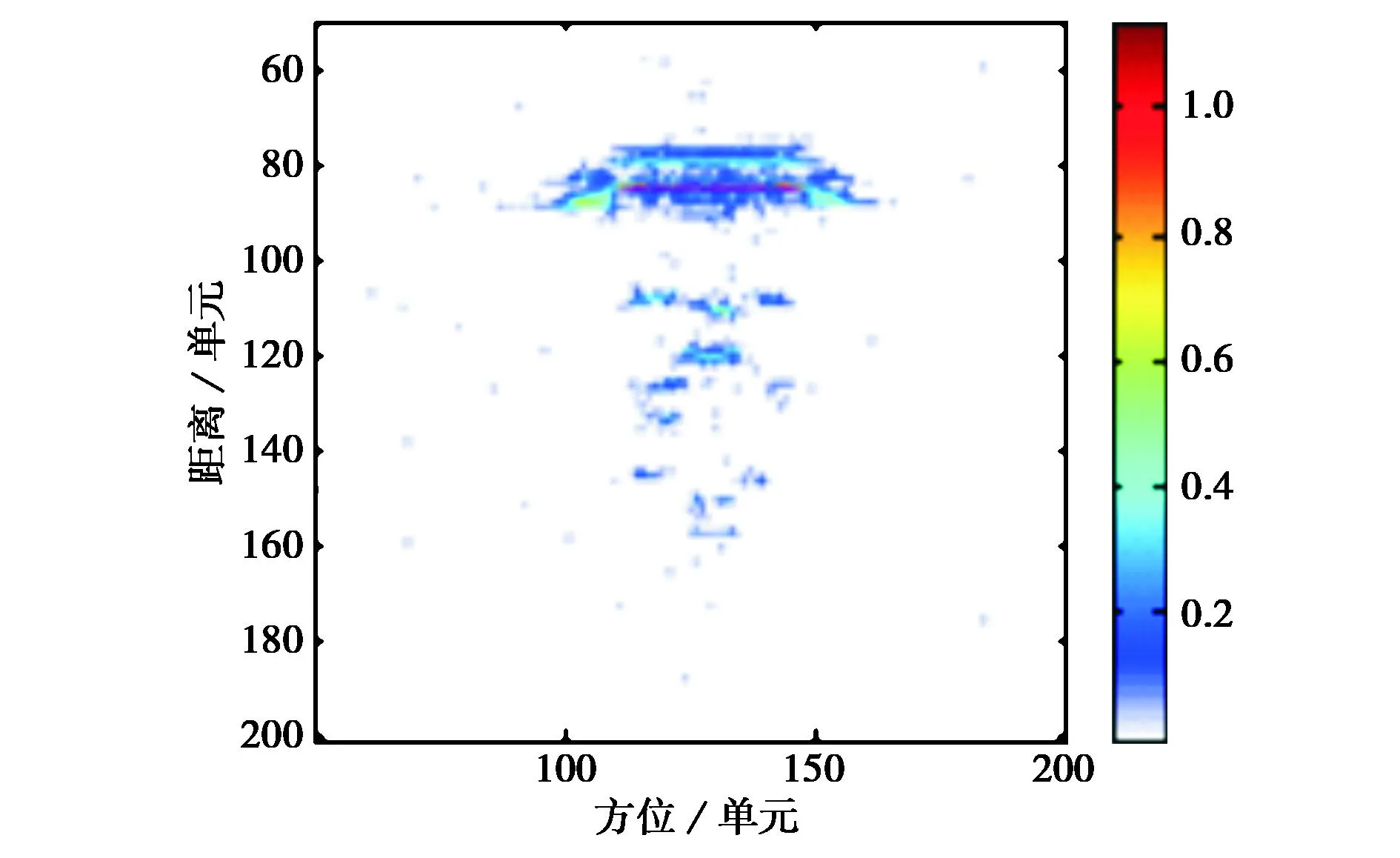
(b) 传统CFAR提取
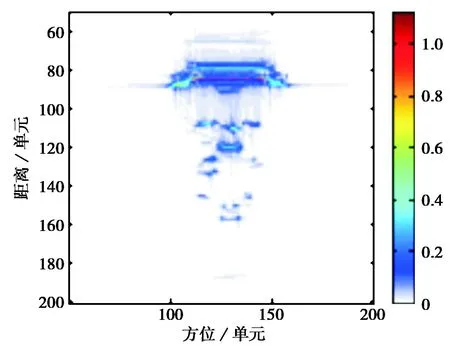
(c) 基于部件的CFAR提取 图3 R SN=0 dB 目标检测结果对比
同样,在信噪比为-5dB和虚警概率为0.002 8时,利用传统基于像素的目标提取算法和基于部件能量的提取算法的对比结果如图4所示. 可以看出,随着信噪比的进一步降低,传统检测算法的性能下降明显,而基于部件能量的提取算法能提取出部分被噪声淹没的弱分布式散射部件. 虽然不能全部恢复,但相比传统算法,性能明显改进.
值得指出,由于基于部件的能量提取需要对目标进行部件级分解,在算法复杂度上要高于传统的基于像素能量的目标提取算法,但由于利用残余误差估计噪声水平,省去了人为确定目标能量支撑区的误差. 忽略传统算法误差估计的耗时,以信噪比为-5dB为例,在主频3.2GHz和3.19GHz的i5
(a) 原始信号
(c) 基于部件的CFAR提取 图4 R SN=-5 dB 目标检测结果对比
双核CPU,内存4GB下,两算法耗时分别为18.4s和1 821.0s. 可以看出,基于部件能量的目标提取算法以牺牲时效为代价换取更精确和连续的目标提取,且耗时也在可接受范围内.
为了进一步说明算法的优越性,定量比较传统目标提取算法和基于部件的提取算法.实验中,采用四个量化指标来评价算法的性能[12]:
首先,利用提取目标信号的RD成像结果与原始参考信号的RD成像的幅度相关系数作为量化指标,形如
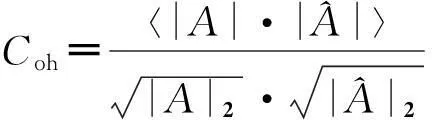
(9)

第二个量化指标为目标背景比(Target-to-Background Ratio, TBR). 通过划分目标支撑区和背景支撑区,将目标支撑区内的信号划定为目标信号,其它为背景杂波.
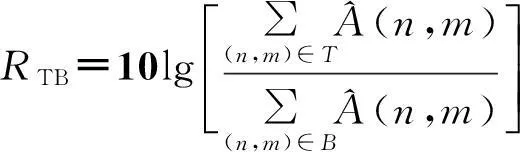
(10)
T和B分别表示目标的支撑区和背景支撑区. 目标背景比用以评价目标提取的精度.
第三个量化指标为噪声能量,表示为
(11)
噪声能量用以评价目标提取算法的噪声抑制能力.
第四个量化指标为图像熵[13],用以表征提取目标图像规律性,从而间接表征目标部件连续性.
在不同信噪比下分别进行20次蒙特卡洛实验,取Coh,RTB,Enoise和图像熵值的均值随信噪比变化的曲线,如图5所示. 可以看出:在低信噪比的条件下,基于部件能量的目标提取算法对传统算法均有明显的改善;且随着信噪比的提高,算法性能提升,两种算法性能越来越接近. 因此,在低信噪比下,建议采用基于部件能量的目标提取算法对人造目标进行部件级提取,而在高信噪比下,建议采用传统算法进行目标提取.
4结论
针对传统目标提取算法在低信噪比下存在提取部件不连续、提取效果不理想等问题,提出了一种基于属性散射中心能量的目标提取方法. 通过对目标信号进行部件级分解,提取出目标的组成部件,并通过对提取部件的能量设置门限区分目标和背景噪声,提高算法在低信噪比下的检测效率和部件的连续性. 实验结果证明了算法的优越性.
参考文献
[1]杨建宇, 李俊生. 高分辨率雷达目标的随机参量脉冲串检测方法[J]. 电子学报, 2004, 32(6): 1045-1046.
YANGJianyu,LIJunsheng.Randomparameterpulsetraindetectorforhighresolutionradar[J].ActaElectronicSinca, 2004, 32(6): 1045-1046. (inChinese).
[2]万朋, 王建国, 赵志钦, 等.SAR图像点目标的检测[J]. 电波科学学报,2000, 15(1): 55-59.
WANPeng,WANGJianguo,ZHAOZhiqin,etal.DetectionforSARimagepoint-target[J].ChineseJournalofRadioScience, 2000, 15(1): 55-59. (inChinese)
[3]保峥, 邢孟道, 王彤. 雷达成像技术[M]. 北京: 电子工业出版社, 2006.
[4]GERRYMJ,POTTERLC,GUPTAIJ.Aparametericmodelforsyntheticapertureradarmeasurements[J].IEEETransactionsonAntennasandPropagation, 1999, 47 (7): 1179-1188.
[5]XUShaokun,WEIXizhang,LIXiang,etal.Parameterestimationandperformanceanalysisofcoherentpolarizationattributedscatteringcentermodel[J].ChineseJournalofElectronics, 2013, 22(1): 195-201.
[6]冯讯, 王首勇, 万洋, 等非高斯相关杂波背景下雷达目标统计检测方法[J]. 电波科学学报, 2012,27(5): 1005-1011.
FENGXun,WANGShouyong,WANYang,etal.Radartargetstatisticaltestincorrelatednon-Gaussianclutterbackgrounds[J].ChineseJournalofRadioScience, 2012,27(5):1005-1011. (inChinese)
[7]STEEDLYWMMOSESRL.Highresolutionexponentialmodelingoffullypolarizedradarreturns[J].IEEETransactionsonAerospaceandElectronicSystems, 1991,27(3): 459-469.
[8]KELLERJB.Geometricaltheoryofdiffraction[J].JournalofOpticalSocietyofAmericaB, 1962, 52(2): 116-130.
[9]DUANJia,ZHANGLei,XINGMendao,etal.Polarimetrictargetdecompositionbasedonattributedscatteringcentermodelforsyntheticapertureradartargets[J].IEEEGeoscienceandRemoteSensingLetters, 2014, 11(12): 2095-2099.
[10]JIAOYun,YUJizhou,CHERenquan.ApplicationofRELAXalgorithmtoISARsuper-resolutionimaging[C]//ProceedingofInternationalConferenceonRadar.Piscataway:IEEE, 2006: 14.
[11]吴敏, 张磊, 邢孟道, 等. 基于分布式压缩感知的全极化雷达超分辨成像[J]. 电波科学学报, 2015, 30(1):29-36.
WUMin,ZHANGLei,XINGMengdao,etal.Fullpolarizationsuper-resolutionSARalgorithmbasedondistributedcompressivesensing[J].ChineseJournalofRadioScience, 2015, 30(1):29-36. (inChinese)
[12]张磊. 高分辨SARJISAR成像及误差补偿技术研究[D]. 西安: 西安电子科技大学, 2013.
ZHANGLei.StudyonHighResolutionSAR/ISARImagingandErrorCorrelation[D].Xi’an:XidianUniversity, 2013. (inChinese)
[13]ZENGT,WANGR,LIF,etal.SARimageautofocusutilizingminimum-entropycriterion[J].IEEEGeoscienceandRemoteSensingLetters, 2013, 10(6): 1552-1556.

段佳(1989-),女,江西人,博士研究生,研究方向为基于电磁散射机理的雷达特征提取与应用.
吴亿锋(1987-),男,安徽人,博士研究生,研究方向为雷达杂波干扰抑制.

张磊(1984-),男,浙江人,讲师,研究方向为ISAR与SAR信号处理.
杜晓林, 苏涛. GS算法在多输入多输出雷达信号集设计中的应用[J]. 电波科学学报,2015,30(4):686-692. doi: 10.13443/j.cjors. 2014082301
DU Xiaolin, SU Tao. Signal sets design for MIMO radar via GS algorithm[J]. Chinese Journal of Radio Science,2015,30(4):686-692. (in Chinese).doi:10.13443/j.cjors. 2014082301
