
永磁直线同步电动机直接推力控制系统的优化设计
2015-12-26 08:33赵晓娟叶永卫
医疗卫生装备 2015年8期
赵晓娟,叶永卫
永磁直线同步电动机直接推力控制系统的优化设计
赵晓娟,叶永卫
目的:对永磁直线同步电动机(permanent magnet linear synchronous motor,PMLSM)的传统直接推力控制(direct thrust control,DTC)系统进行优化设计,以提高其抗干扰性和稳定性。方法:采用空间矢量脉冲宽度调制(space vector pulse width modulation,SVPWM)技术代替传统DTC系统中的开关状态选择表,并在其中引入“预测”的思想,对电压空间矢量进行细分优化,并对定子磁链和推力进行误差补偿。将该方法应用于实验室电动机,首先在Matlab/Simulink环境下搭建控制系统各重要部分的仿真模型,进行仿真实验,然后搭建优化改进后整个控制系统的仿真模型,最后将仿真实验结果与传统直接推力控制系统仿真结果进行比较。结果:从仿真图形上可看出,优化后系统的动态响应速度基本不变,但其抗干扰性提高,稳定性更好。结论:该方法可应用于电梯、自动感应门、电动护理床等要求直线运动的场合,使此类直线电动机控制系统的设计更加理想。
直线电动机;直接推力控制的优化;空间矢量调制技术;预测思想;仿真模型
0 引言
在机场物流运输线、自动感应门、磁悬浮列车、电梯、计算机磁盘定位系统、离子加速器等做直线运动的场合若采用旋转电动机进行拖动,效率较低,如果在上述场合中采用直线电动机直接拖动,可省掉中间传动机构,使整个系统效率大大提高。在医疗器械方面,直线电动机还可应用于电动护理床、电动牵引架、电动手术台、X线检查床等器械中,以此改变了该类器械的提升高度和角度调整范围。本文所用到的直线电动机是永磁直线同步电动机(permanent magnet linear synchronous motor,PMLSM),直线电动机的初级与旋转电动机的定子部分对应,次级与旋转电动机的转子部分对应,永磁直线同步电动机的次级不是电励磁,而采用永磁体直接励磁,这样不仅简化了电动机结构,而且使其运行更可靠、效率更高。
目前,对PMLSM的控制面临着一些难题,之前实验室采用过的控制方式有变压变频控制、矢量控制和直接推力控制3种。这3种控制方式均有优点和缺点,在此不再一一赘述,本文主要针对PMLSM的传统直接推力控制(direct thrust control,DTC)系统进行优化改进,为得到连续的电压空间矢量,本系统采用空间矢量脉冲宽度调制(space vector pulse width modulation,SVPWM)技术,并将“预测”的思想引入其中,最后通过搭建仿真模型,并进行仿真实验、对比仿真结果来说明优化后的控制系统抗干扰性更强,精度更高,稳定性能更好,为实际的SVPWM直接推力控制系统研究奠定基础[1-3]。
1 空间矢量调制技术
把直接转矩控制应用在直线电动机上即称为直接推力控制,由于传统的直接推力控制所提供的电压矢量切换是步进式的,不能完全补偿定子磁链和推力的误差,尤其是低速时脉动更大,无法达到预期控制效果。为此,本文采用了SVPWM技术,将电压矢量进行了细分优化,把原来的步进式的电压控制变为连续式的电压控制,在一定程度上抑制了误差带来的脉动,提高了系统的稳定性。
SVPWM技术仍采用逆变器获得6个非零电压矢量和2个零矢量,共8种开关状态,通过这8种基本电压矢量的线性组合,可以得到所需要的任意电压矢量,提供给定子绕组,使定子磁链保持近似恒定。空间矢量调制技术包含下述3个内容:判断所需参考电压矢量Usref的扇区,估算相邻电压矢量的作用时间,最后是脉冲宽度调制(pulse width modulation,PWM)信号的生成[4-5]。
1.1 扇区判断
扇区判断一般用如下的四则运算法则:
先定义中间变量
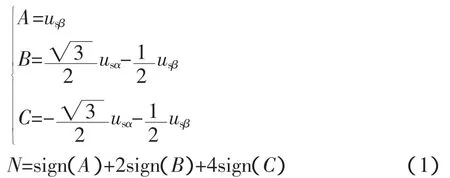
式(1)中,usα为参考电压矢量Usref在α坐标上的分量;usβ为参考电压矢量Usref在β坐标上的分量。
假设i=A、B、C,当i>0时,sign(i)=1;当i<0时,sign(i)=0。根据式(1)得出N的值,由表1得到所需要的参考电压矢量Usref的扇区编号。

表1 N与扇区的对应关系
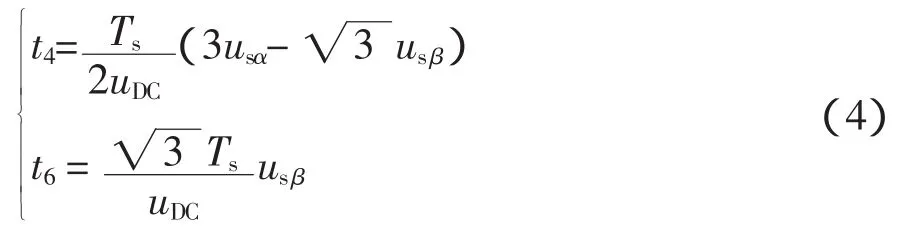
1.2 相邻电压矢量作用时间的计算
假设Ts为一个控制周期,t4、t6分别为基本电压矢量U4、U6在Ts内的作用时间,可以得到合成矢量:

按照逆变器的不同开关组合可得到以下的电压矢量:

联立(1)、(2)并求解得:
控制周期的长短由行波磁场所需的频率来决定,而并不是所有情况下Ts都等于t4+t6。如果二者不相等,必须用零矢量或者来填补剩余的时间。另外,为了减小功率器件的开关次数、降低其能量损耗,每次切换时,最好只切换一个开关器件,因此:t7=这样系统所需要的任意大小和方向的参考电压矢量均可由8种基本电压矢量进行各种线性组合而得到。
1.3 PWM信号的合成
本文中SVPWM调制模式采用7段式的连续开关模式,如图1所示。为方便理解,以第Ⅰ扇区PWM波形的生成来说明,图中Tcm1、Tcm2、Tcm3分别为各电压矢量的切换点。在一个Ts内,每个功率管各开断一次,且每个周期都是以零矢量开始,并以零矢量结束,零电压矢量的选择也依据“开关切换次数最少”的原则。

图1PWM信号生成图
2 基于预测的空间电压矢量调制的直接推力控制(direct thrust control of induction motor using space vector modulation,SVM-DTC)系统
上面已经对传统直接推力控制系统进行了改进,引入SVPWM技术,将原来步进式的电压矢量变为连续式的,本小节对改进后的系统再进行优化设计,引入“预测”的思想,即对定子磁链的误差进行事先观测,争取在下一周期到来时将定子磁链和推力的误差减至最小。
通过分析空间矢量坐标系可知,定子磁链位置角的变化量Δθs与功角变化量Δδ及定子磁链旋转速度ω 2部分有关,用公式表示为

由推力表达式可知,推力Fem的大小与sin δ成正比,故可设计一个比例调节和积分调节器(proportional integral controller,PIC),把ΔFem作为输入,功角变化量Δδ作为输出。当电动机运行在稳定状态时,Δδ= 0,此时Δθs=ωsTs;当电动机运行在暂态时,由于Δδ突变,Δθs=Δδ+ωTs。为了保证定、转子磁链能够同步运行,这里采用了PI调节器,利用其积分作用来实现。
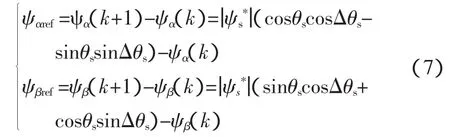
通过计算得到定子磁链的当前值ψs(k),功角变化量Δθs由式(5)得出,因此可求得下一时刻的磁链ψs(k+1),其在α-β坐标系下的分解式为

再将ψs(k+1)与ψs(k)作差,得到定子磁链参考值ψsref,其表达式为
上面求得的定子磁链参考值需要由一个电压矢量参考值来补偿,根据模型计算,并忽略定子电阻压降,可以得到电压参考值为

通过预测下一时刻的定子磁链值得到的参考电压矢量Usref可用于补偿磁链和电磁推力的误差,在一定程度上减小二者的脉动,使控制效果更加理想。
优化改进后的控制系统原理框图如图2所示,其工作过程如下:逆变器输出的三相定子电流ia、ib、ic和电压ua、ub、uc首先经过Clark变换成为α-β坐标系下的对应量,经过磁链模型计算得到ψα、ψβ及θs磁链相位角,再将磁链ψα、ψβ送入电磁推力模型与上一环节得到的iα、iβ进行计算得到推力实际值Fem,与给定值Fem*进行比较,将差值ΔFem送入PI调节器,利用PI调节器的积分作用,得到定子磁链的功角变化量Δθs,与磁链给定值一起送入磁链预算环节进行计算,得到下一时刻定子磁链的期望值ψs(k+1),该期望值与当前值ψs(k)进行比较,求得定子磁链的参考值ψsref,通过u-i模型计算得到电压参考矢量Usref,最后经SVPWM调制环节,把开关信号Sabc输出给逆变器,控制对应开关器件的切换,产生所需要的电压矢量以控制电动机运行[6-8]。

图2 基于预测的SVM-DTFC控制系统的原理框图
3 控制系统仿真
3.1SVPWM模块仿真
通过对空间矢量调制技术的3个步骤分别搭建仿真模型,可以得到如图3所示的SVPWM整体仿真模块,该模块以直流电压UDC、系统采样周期Ts以及参考电压矢量分量uα、uβ4项为输入参数,以三相电压Uabc为输出参数。

图3SVPWM仿真模块
3.2 基于预测的SVM-DTC系统的建模
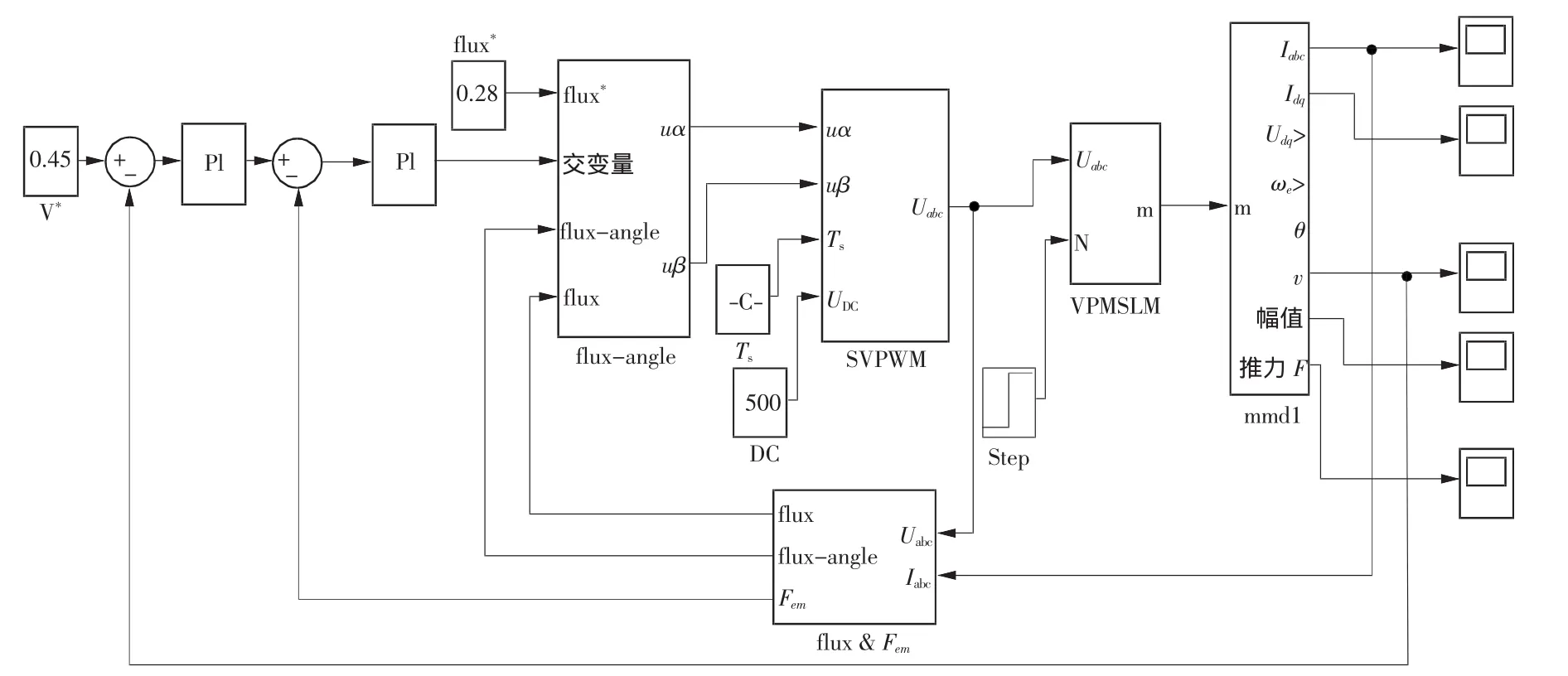
图4 基于预测的SVM-DTC系统仿真模型
图4为搭建好的基于预测的永磁直线同步电动机SVM-DTC控制系统仿真模型,各模块所表示的含义如下:flux yuce为磁链预测模块,SVPWM为空间矢量调制模块,VPMLSM为逆变器与电动机模块,flux&Fem为磁链和推力计算模块[9-10]。
4 仿真结果分析
对上节建立的永磁直线同步电动机基于预测的SVM-DTC整体控制系统进行仿真实验,所用到的永磁直线同步电动机为实验室样机,其重要参数如下:Rs=1.8 Ω,Ls=2.7 mH,ψf=0.28 Wb,τ=45 mm,m=10 kg,Bv=0 N·m/s,该直线电动机为8极电动机,在仿真过程中给定速度V*=0.45 m/s,磁链给定值为ψs*= 0.28 Wb,且电动机以100N的负载启动,在1s时负载突变到300N。比较优化后系统的仿真结果与传统直接推力控制的仿真结果如图5~8所示。
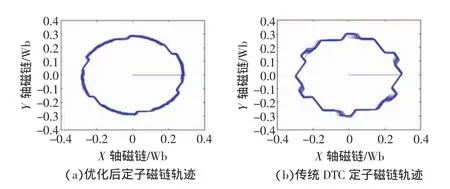
图5 定子磁链轨迹

图6 磁链幅值波形
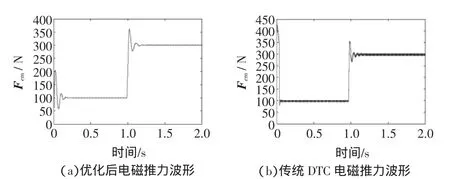
图7 电磁推力波形
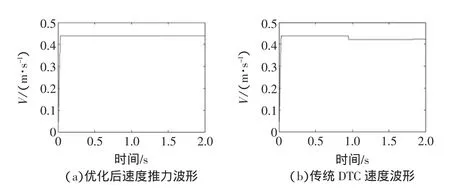
图8 速度波形
从上面的仿真结果对比可以看出,优化改进后永磁直线电动机直接推力控制系统的响应速度并没有减小,但由于系统引入空间矢量调制技术对电压空间矢量进行了细分优化,引入“预测”思想进行了磁链和推力的误差补偿,使定子磁链的运动轨迹更加光滑,很大程度上减小了磁链幅值和推力的脉动,并且在1 s负载突变时仍能保持速度几乎不变。
5 结语
通过对永磁直线同步电动机的直接推力控制进行优化设计,并在Matlab/Simulink环境下搭建系统的仿真模型,分析仿真结果可知,优化后的系统明显改善了原控制系统的动、静态性能以及抗干扰性,同时也显著提高了其随动性,为实际控制系统的设计提供了很好的参考。优化后的系统可应用于电梯、自动感应门、电动护理床等要求直线运动的场合,提高此类控制系统的控制效果。
[1] 陈伯时.电力拖动自动控制系统——运动控制系统[M].北京:机械工业出版社,2006.
[2] 邹积浩.永磁直线同步电机控制策略的研究[D].杭州:浙江大学,2005.
[3] 刘立峰.基于DSP的直线电机直接推力控制的研究[D].沈阳:沈阳工业大学,2005.
[4] 李岩.基于SVPWM的异步发电机模糊直接转矩控制系统仿真[J].电子设计工程,2014,22(22):35-38.
[5] 崔皆凡.永磁直线同步电机推力及其直接推力控制系统研究[D].沈阳:沈阳工业大学,2006.
[6] 刘立峰,李国兴.基于预测控制的直接推力控制系统[J].天津工业大学学报,2007(2):91-94.
[7] 徐艳平.永磁同步电动机减小转矩脉动的直接转矩控制方法研究[D].西安:西安理工大学,2008.
[8] 赵晓娟,崔建明.永磁直线同步电机直接推力控制系统的研究[D].太原:太原理工大学,2012.
[9] 史晓永,王步来,陈雪琴,等.基于SVPWM的永磁同步电机直接转矩控制系统的建模与仿真[J].通信电源技术,2014(3):29-33.
[10] 翟小飞,张俊洪,赵镜红.永磁同步直线电机的MATLAB仿真及其定位实验[J].船电技术,2006(4):6-9.
(收稿:2014-12-08 修回:2015-03-17)
《医疗卫生装备》杂志“质控与安全”栏目征稿
为了更加安全地使用医疗设备,保障医院医疗诊断治疗的安全,本刊“质控与安全”栏目面向全国读作者征稿。该栏目主要是介绍医疗设备计量和质量控制工作的现状,探讨医疗设备使用中的安全问题,研究医疗设备质量控制的检测方法。论文格式参照本刊稿约,请保证文章版权的独立性,严禁抄袭,文责自负,请勿一稿多投。欢迎向该栏目投稿,优秀稿件的出版周期将大大缩短。
注:凡来稿请务必在稿件开头注明作者通讯地址、邮编以及联系电话和E-mail,以便我们及时与您联系。
Optimization design of direct thrust control system of permanent magnet linear synchronous motor
ZHAO Xiao-juan,YE Yong-wei
(Shanxi Conservancy Technical College,Yuncheng 044000,Shanxi Province,China)
ObjectiveTo improve the anti-interference performance and stability of the direct thrust control(DTC)system of the permanent magnet linear synchronous motor(PMLSM).MethodsThe switch state selection table of traditional DTC system was replaced by space vector pulse width modulation (SVPWM),and the"prediction"thinking was introduced.The voltage space vector was subdivided and optimized,and the errors of stator flux linkage and thrust were compensated.The method was applied to the laboratory motor.At first,the simulation models for the important parts of the control system were built under Matlab/Simulink environment,and simulation experiments were carried out.Then the simulation model of the improved control system was established.Finally,the simulation results are compared with the those of the traditional DTC system.ResultsIt's proved that the system gained high anti-interference performance and stability with the dynamic re sponse speed kept constant.ConclusionThe method proposed can be used for the optimization of DTC system of the conditions with linear motion,including elevator,auto door,electric nursing bed and etc.[Chinese Medical Equipment Journal,2015,36(8):15-18]
linear motor;optimization of direct thrust control;space vector pulse width modulation technique;thinking of prediction;simulation model
R318;TM359.4
A
1003-8868(2015)08-0015-04
10.7687/J.ISSN1003-8868.2015.08.015
赵晓娟(1985—),女,助教,主要从事直线电动机控制方面的研究工作,E-mail:xiaojuan308@163.com。
044000山西运城,山西水利职业技术学院(赵晓娟,叶永卫)
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
组合机床与自动化加工技术(2014年12期)2014-03-01
