基于结构光的路面三维重构技术
2015-12-23 01:06郝雪丽孙朝云呼延菊
计算机工程与设计 2015年8期
郝雪丽,孙朝云,李 伟,呼延菊
(长安大学 信息工程学院,陕西 西安710064)
0 引 言
实现被测路面三维可视化具有重要意义[1,2],前人已针对路面三维可视化开展了大量研究[3-10]。本文采用线激光扫描与3D 相继采集数据相结合的技术,基于结构光[11]和3D 相机搭建了硬件系统,实现了路面原始三维数据的采集,提出了双相标准差滤波算法,对采集到的原始数据进行了去噪[12],同时,采用邻近加权平均插值算法[13]与空间积分相结合的算法,实现路面结构的三维重构。本文采用VC++和Matlab混合编程[14]的方法,高效快速地实现了被测路面的三维重构。
1 路面三维信息采集系统设计
1.1 基本原理
由于结构光具有精度高、光条图像信息易于提取等特点,本文采用红外线激光器搭配面阵相机的数据实时采集技术,实现了所检测路段路面三维数据信息的快速采集。线激光器发出的激光光束经透镜扩束后照射在道路上形成一条激光线,路面的高低起伏使激光线发生变形,该激光条纹图像由CCD 面阵相机拍摄。条纹的变形程度取决于线激光器与3D 相机安装的相对位置以及被测路面的形廓。依据激光三角法对采集得到的条纹图像进行计算分析就可以得到路面的凹凸状况,即路面的三维高度信息,为进一步实现路面的三维重构做好准备。
1.2 系统设计
本文设计实现的路面三维信息采集系统如图1 所示,主要由面阵线激光光源和CCD 相机构成。线激光光源提供照射路面的激光,使路面纹理信息能够进行光学体现。相机捕获激光照射在路面上形成的光栅,为路面三维重构提供数据来源。
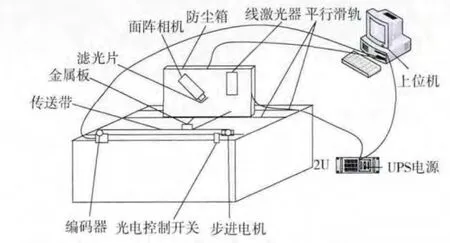
图1 三维数据采集系统
本系统选用的半导体激光器体积小、效率高、重量轻、结构简单,发散角可达到0.1mrad左右,打到物体上的激光束比较均匀,且红外是不可见光,辐射强度、单色性和相干性好,方向性强,更为重要的是,红外光源不易受到可见光的影响。为了获得最佳采集效果,CCD 相机添加了带通滤光镜头,滤除该激光频段以外的其它杂散光的影响,实现全天候采集。此外,系统将线激光器和CCD 相机以及相应的电源和连接线封装在一个密封效果较好的装置内部,前面板留有相机透视口、激光发射口、激光器远程控制线连接口作为图像采集设备对外界的接口。封装设计节省空间、防水防尘防震,使得该系统在工程实际中车载实现时,方便安装、便于标定,具有较高的稳定性。
采集数据时,相机可拍摄激光照射在被检测区域形成的路面剖面轮廓,相机沿路面延伸方向进行测量,测量结果是视场范围内路面横断面上测量点高度信息的轮廓,即路面的高度数据。
2 路面原始三维数据去噪
路面原始三维点云数据在采集、传输和存储过程中不可避免会混入随机噪声,必须进行去噪,否则必然会降低重建路面三维模型的质量。
数字图像处理技术中有很多较为成熟的滤波算法,但对本文数据进行处理时,均不能得到令人满意的效果;考虑到本文原始数据噪声点位置离散,且偏离真实数据差值较大的特点,提出了双相标准差滤波与形态学相结合的方法。
2.1 双相标准差滤波算法
双相标准差滤波中,阈值的设定要根据噪声的特点来确定,步骤如下:
(1)对原始三维数据矩阵o逐行处理,第i行元素记为Ri=(Zi1,Zi2,…,Zin),求其算术平均值Rim和标准差Si
(2)设定阈值k,若数据Zij满足式

则将其用该行数据的算术平均值Rim代替;经多次试验,k=3时效果最好;
(3)对矩阵逐列进行相同处理,得到滤波之后的三维图像数据矩阵o。
(4)对矩阵o进行形态学处理,从而有效消除o中的孤立点。
2.2 路面三维数据去噪实验
本文采用中值滤波算法与本文提出的去噪算法进行了对比实验,并就实验结果进行了误差分析与评价。具体实验结果如图2、图3所示。图2为样本1 (路面错台)滤波效果对比实验,图 (a)是原始数据三维显示效果,图 (b)是经中值滤波后效果,图 (c)是先用双相标准差滤波再用形态学滤波的效果。同理,图3为样本2 (填缝料缺失)的滤波效果。从实验结果图可看出,本文提出的去噪算法效果明显好于中值滤波的去噪效果。
为了进一步确定本文提出滤波算法的去噪效果,使用不同的滤波评价标准,包括峰值信噪比 (PSNR)、最小均方差 (MSE)以及信噪比 (SNR)对实验结果进行了定量分析和评价,见表1。从表中结果可看出,对样本1和样本2,本文提出的去噪算法获得的PSNR、SNR 均远远大于中值滤波结果,同时,在误差方面,本文方法去噪获得的MSE均远远小于中值滤波结果,可见,本文提出的数据去噪算法效果更好。
3 三维重构
物体三维重构是通过采集得到的路面信息数据建立物体几何表面点云。这些点可以通过插补方法形成物体表面模型,点云越密集所建立模型越精确[15]。本文使用采集到的路面三维高度数据作为重构所需的全部点云数据。从而完成了路表信息的三维重构。
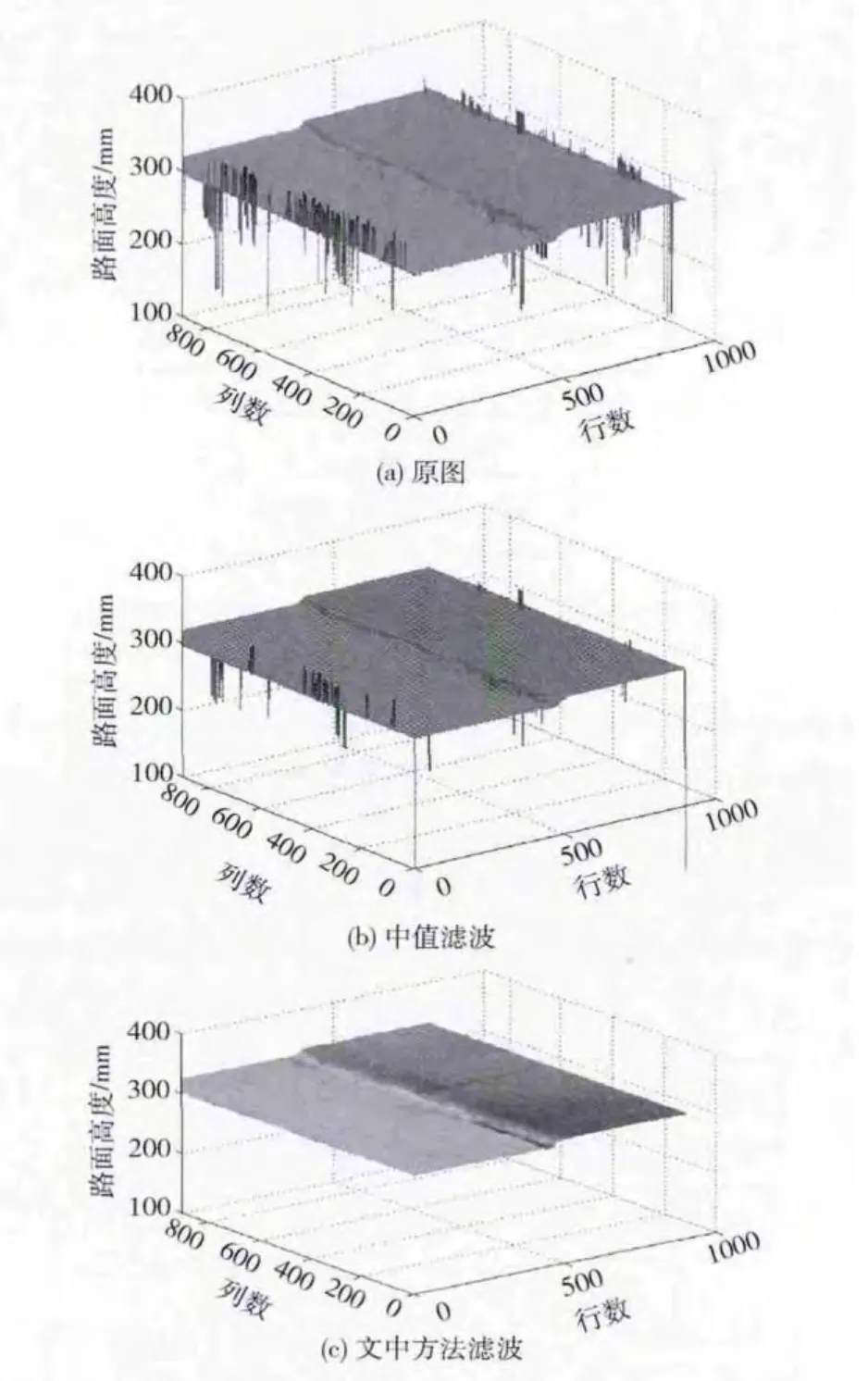
图2 样本1 (错台)滤波效果
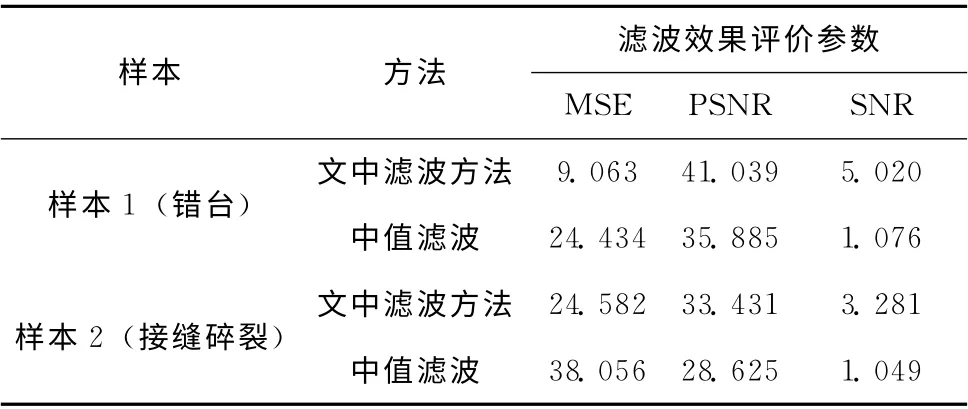
表1 三维数据去噪效果评价
3.1 邻近加权平均插值法
实际路面存在着邻近区域相似度大于较远区域的邻近相似性,基于这个原理,本文提出了邻近加权差值平均的算法,其基本原理为:
采集到的路面数据,其数据量的大小受到投射激光束的密集程度以及采集数据的速度的影响,同时,相对于原始路面必然会漏掉一定的信息,因此,以尽可能大的准确率完成路面信息的恢复是路面三维重构的必要步骤。如图4所示,假设图中A、B、C 三点为实际激光投射点,则其它路面数据则需要通过这三点的数据恢复。
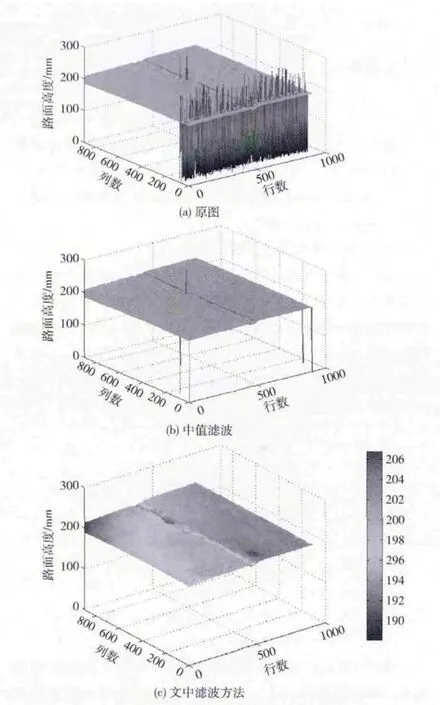
图3 样本2 (填缝料缺失)滤波效果
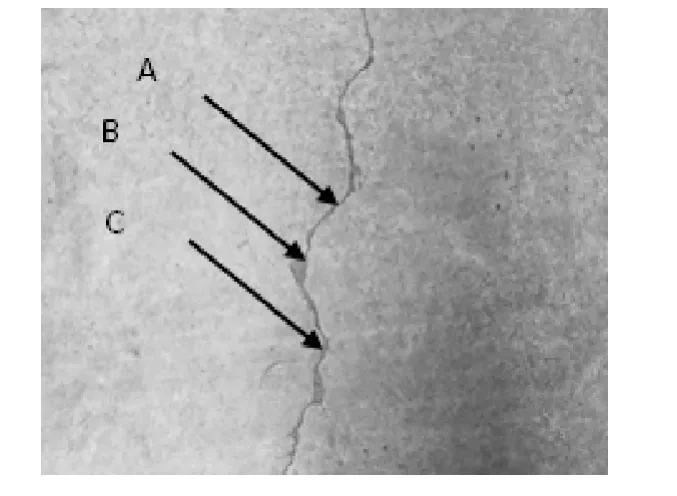
图4 路面数据采集
设f(x,y,t)为采集到的路面数据f′(x,y,t)为恢复后的路面信息,其关系为

其中A、B 为加权系数,其选取原则为


且满足

即中心点的高度值有由其邻近两点的高度值通过系数加权插值得到,并且两边高度值越大的气加权系数越大,式(7)为对加权系数添加的约束条件,该约束条件保证了插值结果满足局部一致性。
3.2 空间积分法路面三维模型重构
路面完整信息通过邻近加权平均差值算法恢复后就可通过空间积分来进行三维模型的重构。图5所示为使用空间积分的方法进行路面三维结构重构。从图中可以看出,随着时间轴的移动,对f′(x,y,t)在其所占有的投影平面Dxy上进行空间积分就可获得重构后的路面结构Φ(x,y,z)。
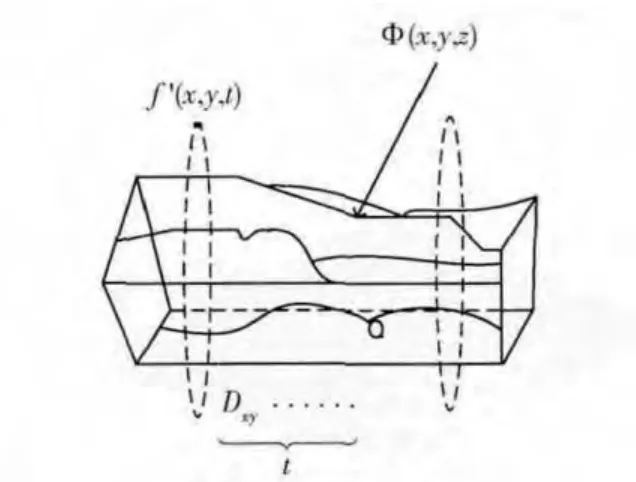
图5 三维重构
设f′(x,y,t)为恢复后的完整路面信息,随着时间的推移,其在空间描述了一个曲面,这个曲面就承载了路面的空间信息,在平面Dxy所在的空间对完整路面信息进行三重积分,就可以获得路面三维空间模型函数Φ(x,y,z),表示为

式中:f′(x,y,t)——经过邻近加权平均法插值后的完整路面信息,Φ(x,y,z)为重构后的路面信息空间模型。
通过对完整路面信息的空间积分就可以得到路面模型的三维重构。
3.3 路面三维重构的实现过程
本文路面三维重构的实现采用直接调用Matlab自带编译器的方法。如图6所示,m 文件被编译成C++代码和包文件,被编译成目标文件,由链接器实现其与Matlab库文件的链接,从而得到独立的C/C++应用程序。
如图7所示,路面三维重构主要实现过程如下:
(1)Matlab 环境配置。用命令mbuild-setup 和mexsetup对编译器进行配置,由用户输入相应指令选择所需编译器,该过程进行一次即可。
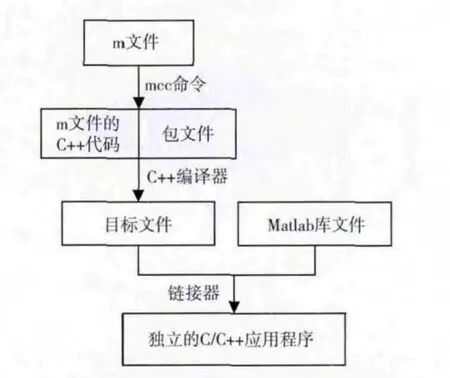
图6 Mcc构建C/C++应用程序过程
(2)编译m 文件。自主编写的三维重构程序命名为Display.m。在Matlab 中执行命令mcc-C-W cpplib:Displaylib-T Link:lib Display.m,可得到后缀名为.h,.cpp,.hpp,.dll,.ctf的文件。
(3)VC++环境设置。建立MFC 应用程序,将上一步生成的所有文件复制到该工程目录中,并将对应的头文件、.cpp文件、数据库文件和包含路径添加到当前工程中。
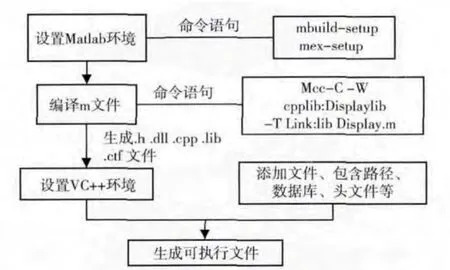
图7 三维重构的实现流程
需要注意的是,要用mwArray对调用过程中涉及的参数进行转化。这样,就实现了路面的三维重构。
4 实验结果分析
如图8所示,图 (a)是本文实现的路面三维重构结果的三维空间显示,图 (b)是用对应的路面结构重构模型。
从图8 (a)、(b)中可明显看出该段水泥混凝土路面有较为严重的裂缝,与人工观测结果基本相符;此外,应用混合编程调用Matlab命令语句可直接获得裂缝的宽度、长度、深度等量化指标。该三维重构方法为采集到的路面高度数据提供了较为成熟、符合精度要求的后期处理和展示方法,可以为检测人员提供路面三维形状信息,在使得道路检测结果更为直观的同时,也为下一步对病害类型的判定、破坏程度的划分、工程质量的评价提供了依据。
5 结束语
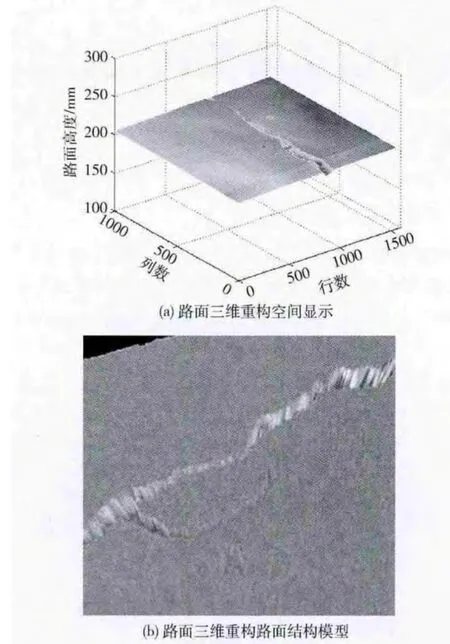
图8 路面三维重构结果
本文采用线激光器和面阵3D 相机实现了路面三维信息的快速、精确采集,设计了双相标准差滤波算法,并与形态学滤波相结合对原始数据进行去噪,对比实验验证了去噪效果的有效性。提出了邻近加权平均差值算法与空间积分的算法实现了路面三维数据的恢复和建模,应用Matlab与VC++混合编程的方法实现了路面的三维重构,效果良好。此外,三维数据采集系统的封装设计充分考虑了道路养护人员的实际需求,便于其在工程应用中的车载实现。
[1]Uslu Berk,Golparvar-Fard Mani,De La Garza,et al.Imagebased 3Dreconstruction and recognition for enhanced highway condition assessment [J].ASCE International Workshop on Computing in Civil Engineering,2011:67-76.
[2]Zhang Kaibin,Xie Fei,Wang Guolin,et al.Reconstruction and validation of non-straight road model based on ADAMS[J].Qiche Gongcheng/Automotive Engineering,2011,33(11):985-989.
[3]Le MH,Vavilin A,Jo KH.3Dscene reconstruction enhancement method based on automatic context analysis and convex optimization [J].Neuro Computing,2014,137 (1):71-78.
[4]Guan Yingjian,Yin Yongkai,Li Ameng,et al.Dynamic 3D imaging based on acousto-optic heterodyne fringe interferometry[J].Optics Letters,2014,39 (12):3678-3681.
[5]MA Ronggui,WANG Huamei.Three dimensional road reconstruction based on GPS and ruts[J].Journal of Tongji University(Natural Science),2012,40 (10):1517-1521 (in Chinese).[马荣贵,汪花梅.基于GPS和车辙的三维路面重构 [J].同济大学学报(自然科学版),2012,40 (10):1517-1521.]
[6]YANG Yiming,WEN Aimin,LIU Yiguan.Reconstruction of 3Droad model and its verification based on adams[J].Journal of Highway and Transportation Research and Development,2010,27 (12):140-144 (in Chinese).[杨益明,文爱民,刘奕贯.三维路面模型的构建及其在Adams中的验证 [J].公路交通科技,2010,27 (12):140-144.]
[7]Horna S,Meneveaux D,Damiand G,et al.Consistency constraints and 3D building reconstruction [J].CAD Computer Aided Design,2009,41 (1):13-27.
[8]CHEN Hengli,KANG Gewen,REN Wenwei.3D Reconstruction model of metal fracture SEM image and realization[J].Application Research of Computers,2008,25 (2):498-500 (in Chinese).[陈亨利,康戈文,任文伟.金属断口SEM图像三维重建模型及实现研究 [J].计算机应用研究,2008,25 (2):498-500.]
[9]Sauli Z,Retnasamy V,Nadzri N S,et al.3Dshape measurement and reconstruction using fringe projection [J].Applied Mechanics and Materials,2014,487 (4):572-575.
[10]WANG Jianwen,DU Chunmei.Study on key techniques for 3Dlaser scanning system [J].Computer Engineering and Design,2010,31 (5):1089-1092 (in Chinese).[王建文,杜春梅.三维激光扫描系统的关键性技术研究 [J].计算机工程与设计,2010,31 (5):1089-1092.]
[11]FENG Jincheng.Design of high precision laser triangulation measurement system [D].Nanjing:Nanjing University of Science &Technology,2008 (in Chinese).[冯金城.高精度实时激光三角测距系统设计[D].南京:南京理工大学,2008.]
[12]SUN Zhenglin.Research on cloud data filtering method of 3D laser scanning point[D].Nanjing:Central South University,2011 (in Chinese).[孙正林.三维激光扫描点云数据滤波方法研究 [D].南京:中南大学,2011.]
[13]YAO Yibin,HUANG Shuhua,KONG Jian,et al.Total least squares algorithm for fitting spatial straight lines [J].Geomatics and Information Science of Wuhan University,2014,39 (5):571-574 (in Chinese).[姚宜斌,黄书华,孔建,等.空间直线拟合的整体最小二乘算法 [J].武汉大学学报 (信息科学版),2014,39 (5):571-574.]
[14]WANG Yi,FAN Ming, HE Lian. Hybrid programming analysis of Matlab and VC++based on Matcom [J].Journal of Harbin University of Commerce (Natural Sciences Edition),2007,23 (3):311-314(in Chinese).[王毅,樊明,何联.基于Matcom 的Matlab与VC++混合编程分析 [J].哈尔滨商业大学学报(自然科学版),2007,23 (3):311-314.]
[15]GUO Jin,LIU Xianyong,CHEN Xiaoning,et al.An unmarked 3Dpoint cloud automatic registration technology [J].Computer Application and Software,2012,29 (4):144-147(in Chinese).[郭进,刘先勇,陈小宁,等.一种无标记点三维点云自动拼接技术 [J].计算机应用与软件,2012,29(4):144-147.]
猜你喜欢
山东冶金(2022年2期)2022-08-08
摄影世界(2022年1期)2022-01-21
知识经济·中国直销(2018年12期)2018-12-29
商周刊(2017年6期)2017-08-22
上海金属(2016年1期)2016-11-23
山东大学法律评论(2016年0期)2016-08-16
焊接(2016年8期)2016-02-27
焊接(2015年9期)2015-07-18
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23