
基于神经网络的高压绝缘子清扫机器人的控制器设计
2015-12-23 06:39张雪峰
制造业自动化 2015年24期
张雪峰,罗 浩,郑 雷,龚 浩
ZHANG Xue-feng, LUO Hao, ZHENG Lei, GONG Hao
(国网电力科学研究院武汉南瑞有限责任公司,武汉 430074)
0 引言
随着当代电力设施的迅速发展,大规模的高压绝缘子被使用。然而,由于绝缘子污染而导致的工业事故,环境污染等问题却日益严重。定期清扫绝缘子成为最基本、最有效的防治方法。由于绝缘子的规模巨大,传统人工清扫不仅危险性高,而且劳动强度大、效率低下。于是,具有带电工作能力的清扫机器人便应运而生。绝缘子清扫机器人具有清扫一致性好、可靠性强、工作效率高等优点,无人或技术人员的远距离操作保证清扫过程的安全性,在未来机器人领域和电力设施领域都具有非常广泛的应用前景。通过文献[1],可以看出当前,高压绝缘子清扫机器人理论研究还相当薄弱,为适应当前电力设施及其他相关领域的的快速发展,高压清扫机器人的研究已迫在眉睫。
高压绝缘子带电清扫机器人的清扫对象是当今工业变电站(所)或电力设备中大量使用的支柱型绝缘子,由安装在移动载体上的剪式结构升降臂、清扫臂及手爪组成。清扫机器人工作时升降臂将作业平台提升至指定高度,在视觉系统的辅助下,清扫臂伸出并接近绝缘子,清扫手爪对绝缘子进行自动清扫。为了保证在220/330kV高压环境下作业的安全性,机器人主要结构件均采用绝缘材料,刚度有限。随着作业强度的增加,在清扫臂运动过程中,机器人清扫手臂表现出柔性臂的特征,产生柔性弯曲振动,影响机器人的定位精度、作业效率以及安全性。因此一种具有更高鲁棒性和容错性的控制器是十分必要的。
在本文结构中,第一部分分析和建立了清扫机器人的研究动力学模型。第二部分给出了基于BP神经网络的自适应控制器设计原理和设计方法。最后,在第三部分中,给出了基于动力学模型的控制仿真,证明本方案的有效性。
1 模型建立
高压绝缘子清扫机器人如图1所示,由升降架和清扫手臂组成。当清扫机器人正常工作时,升降架高度固定,清扫手臂做清扫运动。

图1 高压绝缘子清扫机器人工作示意图
根据绝缘子清扫机器人的清扫原理,将升降架视为均匀分布的柔性杆,清扫手臂视为均匀的刚性杆,在驱动力τ的作用下,清扫手臂做清扫运动,并且也使得升降架做往复振动。在控制中,刚性杆的控制误差的产生主要是由于柔性杆的振动引起的,因此,在本文中考虑控制对象为由升降架抽象出来的柔性杆在力矩τ的控制下的运动轨迹控制。基于这种考虑绝缘子清扫机器人的控制模型其实是一个柔性臂机器人系统[2,3]。考虑清扫机器人具体的物理参数、运动方式等情况,本文采用欧拉-伯努利梁模型作为清扫机器人的力学模型。图2所示的为当梁弯曲时,所产生的横向变形效果。
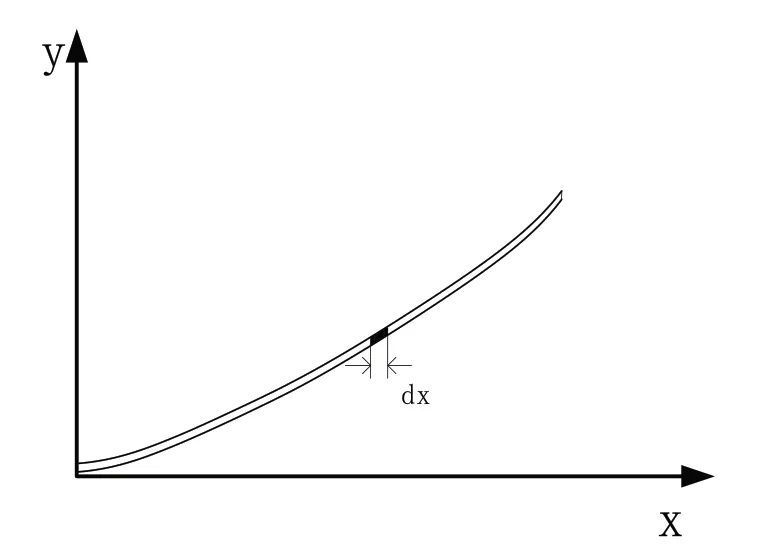
图2 梁的横向变形示意图
欧拉-伯努利梁的横向自由振动运动方程为[4]:

其中,EI为梁的刚性模量,ρ为梁的密度,A为梁的横截面积。上述方程是一个四阶齐次偏微分方程,其连续系统的精确解仅限于简单的构件形状和边界条件,对于大多数工程问题来说,必须利用近似方法求解。各种近似方法的共同点是将连续系统用一个有限自由度系统代替。离散后的自由度数目取决于所要求精度。连杆的变形假定一般有四种,即运动学静态方法、集中质量法、假设模态法和有限元法。在这些方法中,运动学静态方法是静态分析法,后三种为动态方法。运动学静态方法仅考虑了小的准静态弹性变形,连杆的柔性用线性弹簧代替。因此当研究的问题涉及到较高的速度和较大的加速度变化时,则必须采用动态方法。集中质量法是将连续系统的质量集中到有限个点或截面上,假设模态法是用已知的有限个函数的线性组合来构造连续系统的解,有限元方法兼有这两类方法的特点。由于假设模态法建立的方程计算效率较高,便于在数值仿真及实时控制中使用,因此在本案中的建模方法中,使用假设模态法来求式(1)的解。采用分离变量法求解式(1)可得:

在本文中,我们总是假定清扫机器人所抽象出的柔性臂其横截面是矩形。对于该柔性臂运动过程各变量定义如图3所示。

图3 清扫机器人模型
图中,θ1和θ2分别是虚拟刚性臂的关节角和柔性臂与虚拟刚性臂之间的关节角,L为杆长。τ是驱动力矩。根据上述定义和拉格朗日方程可得:

式中,T,P分别表示清扫机器人臂的动能、势能。解上述拉格朗日方程可得:
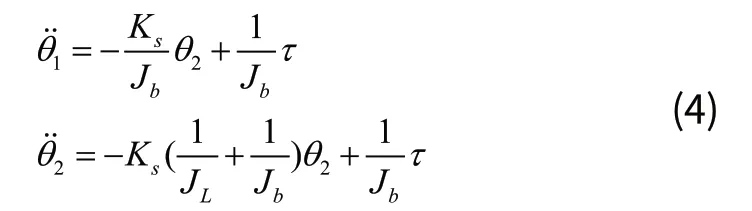
式中,Ks表示清扫机器人臂的抗弯刚度,Jb高速转动惯量,JL挠性构件转动惯量,τ输入驱动力矩。
上述动力学方程的矩阵形式为:

2 基于BP神经网络的逆控制器设计
由于其具有结构简单、耦合能力高以及各种先进的优化算法,神经网络已经在控制领域得到了广泛的应用[5~8]。在本文的设计方案中是利用BP神经网络来建立其逆系统控制器。根据BP算法原理,利用采集并处理后的样本对神经网络进行逆向训练。从建立具有良好鲁棒性和容错性的控制系统。逆系统控制器(BPC)的训练方法如图4所示。
在方便叙述逆控制器的BP算法的说明,首先给出以下定义和说明。
逆系统控制器的网络结构为M×P×T,即输入层神经元数目为M个,隐含层神经元数目为P个,输出层神经元数目为T个。
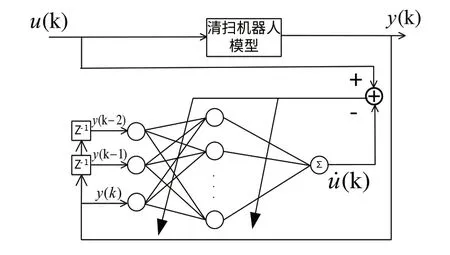
图4 逆系统控制器的训练学习方法
在逆系统控制器中,V=(Vpm)P×M,W=(Wtp)T×P分别表示输入层与隐含层之间、隐含层与输出层之间的连接权值矩阵。并且,Vp:=(Vp1,Vp2,…,VpM),p=1,2,…P;Wt:=(Wt1,Vt2,…,VtP),t=1,2,…T。用HI=(HIp)P×1,HO=(HOp)P×1分别表示逆系统控制器中隐含层的输入、输出向量,XC分别表示系统辨识器和逆系统控制器的输入向量。

利用BP算法原理,可以得到逆系统控制器的调整算法的迭代步骤:

这样就得到了基于BP算法原理的逆系统控制器的在线调整的自适应算法,其收敛性证明见文献[9,10]。

3 仿真
应用上述控制系统方案,对清扫机器人做轨迹跟踪系统仿真。在模型中,连杆的物理参数如表1所示。

表1 清扫机器人的物理参数
从表中可以看出,θ2是由于柔性臂弹性弯曲所产生的角度,也是我们所有控制的角度。在仿真中,我们设置的跟踪轨迹是频率为4π矩形波信号。利用上述的逆控制系统对清扫机器人进行轨迹跟踪仿真,其结果如图5所示。
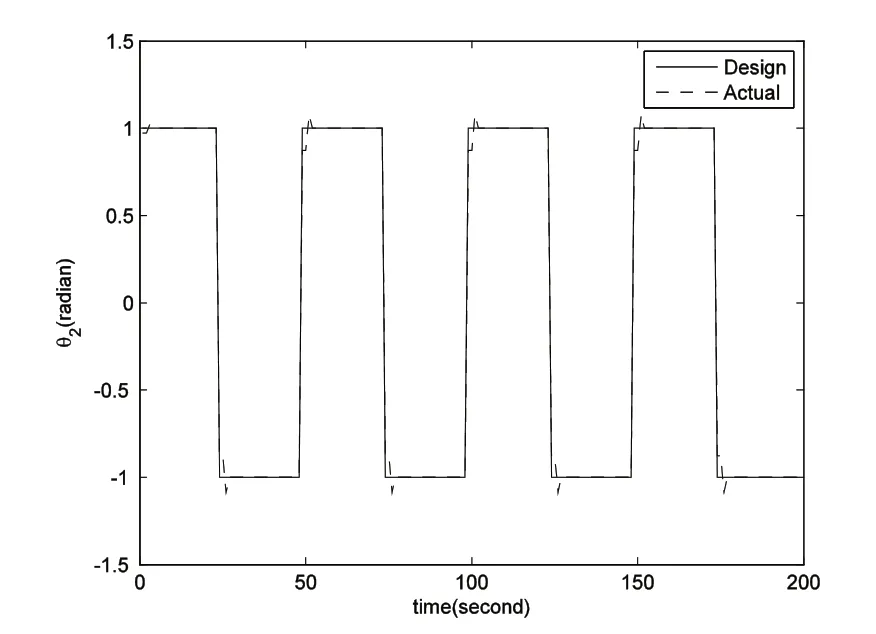
图5 仿真结果
从控制器仿真图中可以看出,θ2的实际输出很好的跟踪上了目标输出,即使在目标信号发生突变时,跟踪信号仍然可以较快地稳定到目标信号。因此,本文中提出的基于神经网络逆控制器设计方法是有效的,并对由于柔性杆带来的振动具有良好的鲁棒性。
4 结论
在本文中,我们提出了一种基于BP神经网络的逆控制方法。首先,对所控制对象进行抽象和简化建立其动力学模型;然后,对控制对象模型进行采样,并对得到样本进行样本处理(例如样本筛选等);利用处理后所得样本对BP网络进行训练,以期达到该BP神经网络的映射关系逼近所控制对象模型的逆模型的映射。通过控制训练精度和训练时间,便得到了一种具有良好鲁棒性的逆控制器。
基于本文提出的理论和方法,今后工作的开展方向主要集中于两个方面。第一、选用具有不同特性的神经网络进行控制比较。本文中选用的BP神经网络具有拟合能力强,网络结构简单等特点。但是,同时BP神经网络又具有易陷入局部极小点的缺点。因此,在今后的工作研究中,可以选用径向基函数神经网络等不会陷入局部极小点的神经网络进行控制并作性能比较。第二、加入自适应方案。在今后的工作研究中,可以在本文方法的基础上,加入自适应控制方案,对逆控制器进行在线调整,使得所设计的控制器对外界环境,自身参数变化等情况具有很好的自适应能力。
[1]S.Hirose and S.Aoki,Development of the insulator washer robot[A].in Robotics and Automation,1995.Proceeding,1995 IEEEInternational Conference[C].IEEE,1995,2:1783-1789.
[2]孙斌,徐威,杨汝清,高压绝缘子清扫机器人的动力学建模及分析[J].上海交通大学学报,2004,38(8):1304-1306.
[3]G.G.Hastings and W.J.Book,A linear dynamic model for flexible robotic manipulators[J].Control Systems Magazine,IEEE,1987,7(1):61-64.
[4]吴立成,杨国胜,郐新凯.柔性臂机器人建模、分析与控制[M].高等教育出版社,2012.
[5]Y.Xiaofang,W.Yaonan,S.Wei,and W.Lianghong,Rbf networks-based adaptive inverse model control system for electronic throttle[J].Control Systems Technology,IEEE Transactions.2010,18(3):750-756.
[6]K.S.Narendra and K.Parthasarathy,Identification and control of dynamical systems using neural networks[J].Neural Networks,IEEE Transactions.1990,1(1):4-27.
[7]Y.Song,J.Ma,H.Zhang,and N.He,Digital implementation of neural network inverse control for induction motor based on dsp[A].in Future Computer and Communication (ICFCC),20102nd International Conference[C].IEEE,2010,1:1-174.
[8]L.Zilong,L.Guozhong,and L.Jie,Adaptive tracking controller using bp neural networks for a class of nonlinear systems[A].Systems Engineering and Electronics[C].2004,15(4):598-604.
[9]P.Werbos.Beyond regression:New tools for prediction and analysis in the behavioral sciences[M].
[10]W.Wu,G.Feng,Z.Li,Y.Xu.Deterministic convergence of an online gradient method for bp neural networks[J].IEEE Transactions on Neural Networks.2005,16(3):533-540.
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
军民两用技术与产品(2022年6期)2022-08-06
计算技术与自动化(2022年1期)2022-04-15
石油沥青(2021年5期)2021-12-02
宁夏电力(2021年1期)2021-03-19
文化创新比较研究(2020年7期)2021-01-13
电子制作(2018年17期)2018-09-28
廉政瞭望(2018年15期)2018-09-17
山东工业技术(2015年18期)2015-07-16
民生周刊(2015年6期)2015-03-23
