
新型振动捣固臂的动力学分析
2015-12-21 01:05刘毅龚国芳
中南大学学报(自然科学版) 2015年9期
刘毅,龚国芳
新型振动捣固臂的动力学分析
刘毅1, 2,龚国芳2
(1. 浙江大学宁波理工学院,浙江宁波,315100;2. 浙江大学流体动力与机电系统国家重点实验室,浙江杭州,310027)
根据新捣固机的工作原理,对核心部件捣固臂进行建模和结构分析,完成整个机械结构的设计,确定装置中主要结构尺寸及相关的工作参数。通过虚拟样机技术及仿真软件平台Pro/E,建立新捣固机的虚拟样机,并进行运动学仿真。研究结果表明:新捣固机的捣固臂采用负载自适应、频率和振幅连续可调的液压振动技术,克服了强迫振动加速捣镐磨损以及夹持液压缸摆动的缺陷。
捣固机;捣固臂;数学建模;结构建模;设计分析
捣固机是铁路养路维护装备中捣固车的核心部件,它是利用振动、冲击和加压的原理使得枕木底部的石碴重新组合,密实紧凑,加强枕木底下支撑力量均衡的一种专用机械设备[1−3]。目前,全球捣固机核心技术主要由奥地利的Plasser、瑞士的Matisa和美国的Harsco 3家国外公司所掌握,且产品性能各有特点。奥地利的Plasser捣固机采用偏心轴连杆摇摆式振动,异步夹持的工作方式[4−5];瑞士的Matisa捣固机采用垂直平面内的椭圆振动,异步夹持的工作方式[6−7];美国的Harsco捣固机采用水平面扭转振动,同步夹持的工作方式[8−9]。这些捣固机都存在捣镐振动频率和振动幅值无法连续可调,以更好地适应不同的工况(在板结道床,捣固装置的高频率低振动幅值捣固工作要求,而在松散道床的低频率高振动幅值捣固工作要求,需要可调工作频率范围为40~80 Hz,可调振幅范围为0.004~0.008 m,捣固镐头激振力4 kN左右),提高作业精度和效率。虽然国内有几家大公司能大批量生产上述3种类型的捣固机,但多为引进设备。国内的高校及企业对已有的Plasser和Matisa捣固机的技术参数及结构方面进行了分析,并对捣镐振动时夹持油缸随之晃动的问题进行了研究,但尚未解决强迫振动时,捣镐磨损严重、夹持液压缸晃动漏油以及捣镐振动幅值和频率无法连续可调的问题[10−16]。改善捣固机振动方式是实现铁路线路的平整性、一致性和均匀性的关键技术基础。为了提高我国大型养路机械的整体水平,本文作者对新提出的液压激振式捣固机[17]进行建模分析与设计。
1 新捣固机的工作原理
新装置利用液压的负载自适应特性,采用液压激振的方式实现石碴夯实捣固。图1所示为新捣固机工作原理示意图。从图1可知:新装置包括箱体和对置安装在箱体2个侧面上的捣固臂,夹持液压缸的缸体与箱体铰接,各捣固臂包括上捣固臂、下捣固臂、激振液压缸和拨叉。激振液压缸与拨叉联接为一体,激振缸的振动通过拨叉带动下捣固臂捣镐的振动,激振缸通过相适应的换向转阀[18]来控制实现捣镐振动幅值和频率的连续可调。夹持液压缸伸缩时,使得上捣固臂绕支承轴摆动,带动下捣固臂实现其捣镐的夹持运动。上述设计使得捣镐的振动对上捣固臂的振动影响有较大的衰减,克服了激振时夹持油缸随之摆动的缺陷。

图1 新捣固机工作原理示意图
2 新捣固机的建模
图2所示为捣固臂的不同的工作状态。从图2可见:第1个状态是捣固机下插时,捣镐对两边石碴都产生作用力,捣镐主要是克服石碴之间摩擦阻力的作用。第2和3个过程是在夹持时,捣固臂向左激振和向右激振不同状态。石碴只能受压不能受拉,当夹持了一段时间时向左激振,捣镐既要克服石碴之间的摩擦力,也要克服石碴刚度的作用。

(a) 下插时;(b) 向左激振时;(c) 向右激振时
根据图1和图2,可得捣固臂工况分析如图3所示。将捣镐捣入石碴部分的受力简化为垂直和沿着捣镐2个方向。图3中:0为上捣固臂在竖直位置时的初始状态;0捣镐在末端位置时的初始状态;为下捣固臂质心的位置;为销轴与拨叉接触位置;∆1为夹持液压缸行程;∆为激振液压缸行程;为夹持液压缸的转角;为夹持转角角速度;为夹持液压缸左端点与上捣固臂点的连线与垂直位置之间的夹角;为下捣固臂的夹持距离。
从图3可知:假设整个捣固臂处于夹持的极限位置,上捣固臂绕支撑轴顺时针旋转角度;下捣固臂绕支撑轴逆时针旋转角度;其角速度和角加速度分别为和;和为下捣固臂在支撑轴处的约束反力,其中为捣镐的1个工作点。
若把定为细长杆,考虑到下捣固臂运动为刚体转动,则下捣固臂绕轴转动的动量矩为

(a) 原理图;(b) 受力分析图
假定力矩,动量矩以逆时针方向为正,力以左方向为正,则下捣固臂的力学方程为

(2)
式中:1为转轴处的滚动摩阻,,为滚动摩阻系数;为激振液压缸输出的力;和为分解的下插阻力。
图4所示为Plasser捣固机激振机构振动分析示意图。从图4可见:Plasser装置捣镐镐头的激振方式是连杆摇摆式强迫振动,连接销轴运动时的中点位置为,销轴运动的始点为,终点为,偏心轴的偏心距为,偏心轴点至连接销轴间点的距离为L,偏心轴的转角为,偏心轴的转动角速度为,连线与连线间的夹角为。

图4 Plasser捣固机激振机构振动分析示意图
假设捣镐实际振动的振动幅值较小,即捣固臂绕点旋转幅度较小,销轴离开运动中点的位移为

从图4中△可得
其中:L为0.700 0 m,L为0.400 0 m,L为 0.500 0 m和为0.002 5 m。
同时由三角余弦定理可知
当确定了夹持液压缸夹持距离与夹持距离之比时,即可确定上下捣固臂之间的关系。现有的捣固车中,安放捣固机空间最大的高度为1.600 m,考虑现有轨枕之间距离与捣固机夹持运动参数,确定外捣固臂的夹持最大距离为0.180 m,外夹持液压缸的输出最大距离为0.060 m,外捣固臂的上下部分比为0.33;内捣固臂夹持最大距离为0.060 m,内夹持液压缸的输出最大距离为0.015 m,内捣固臂上下部分比为0.25。考虑到内外捣固臂的紧凑布置及安放捣固机空间最大的高度,外捣固臂的上捣固臂长度为0.400 m,内捣固臂的上捣固臂长度为0.300 m,下捣固臂长度同为1.100 m。现有的捣镐长度为0.400 m左右,令下捣固臂的上下部分长度比为1:2,确定其上部分长度为0.280 m,下部分长度为0.560 m,最终得到捣固机的三维模型如图5所示,相关结构参数和系统参数如表1所示。
3 捣固机的运动与力分析
利用Pro/Mechanism软件对新型捣固机机构的运动学进行分析,通过运动学仿真测量主体上某一位置的位移、速度、加速度的变化,并创建运动轨迹曲线。同时,利用碰撞干涉检查的模块分析零件之间有无干涉。
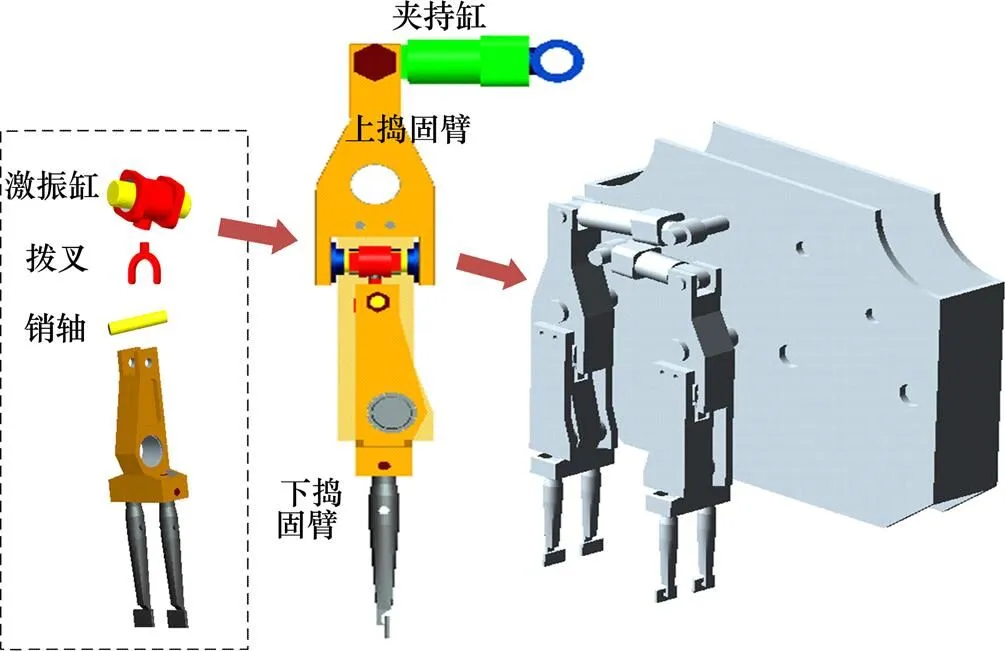
图5 捣固机三维模型图

表1 相关结构和系统参数
注:f为激振缸的激振频率;αmax为上捣固臂的最大夹持角;θmax为下捣固臂的最大激振角。
在检测新捣固机的虚拟样机没有干涉的情况 下,添加动力源并定义运动函数以及输入相应的运动参数。其中,定义夹持液压缸位置−时间函数为,激振液压缸位置−时间函数为。分以下3种情况进行研究:=0.002,f=80;=0.004,f=40;=0.004,f=80。选取捣镐1末端点为测量点和起始原点,向右为正方向,在夹持和激振同时作用下,得到捣镐位移运动学仿真结果如图6所示。从图6可知:因为捣镐1夹持向右的作用,使得液压缸位移正值越来越多。随着激振液压缸位移和运动频率的变化,捣镐位移和运动频率也随着变化,即当液压缸振幅为0.002 m,频率为40 Hz时,仿真得到捣镐振幅为0.004 m;当液压缸振幅为0.004 m,频率分别为40 Hz和80 Hz时,仿真得到捣镐振幅都为0.008 m。仿真结果说明可以通过调节激振液压缸振动的位移和频率从而实现捣镐位移和频率可调。且激振液压缸振动幅值和捣镐振动幅值满足一定的比例关系,该比例关系由下捣固臂上下部分长度比所决定。
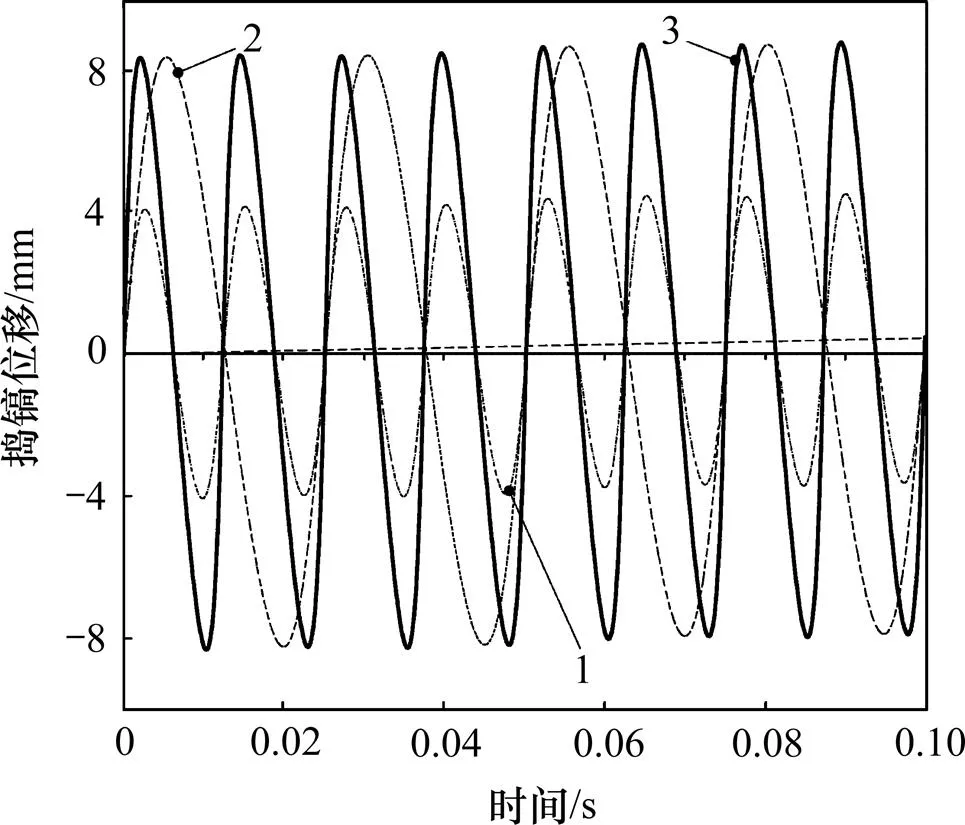
1—fj=80 Hz, A=0.002 m; 2—fj=40 Hz, A=0.004 m; 3—fj=80 Hz, A=0.004 m
新捣固机虚拟样机的初始和最终的夹持运动状态如图7所示。
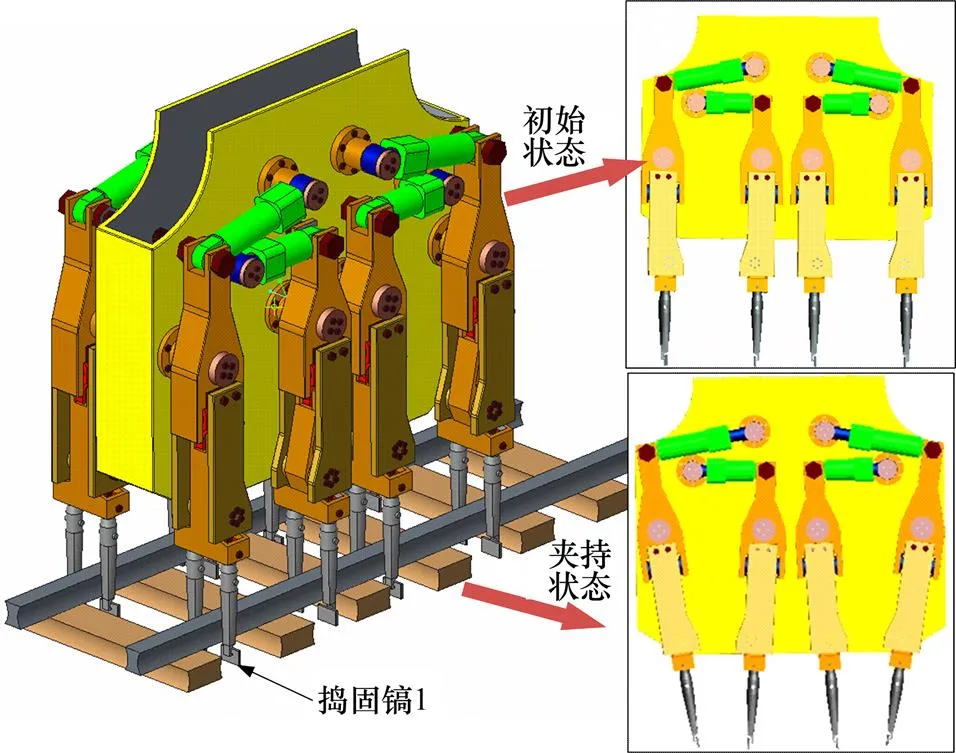
图7 新捣固机运动状态示意图

图8 激振缸所需力的对应关系
假定捣固臂的激振频率为80 Hz时,同样对捣固臂受力关系式(2)求解分析。考虑到捣镐夹持力的因素,得出了如图9所示在同一频率情况下,不同时刻的激振缸所需力的对应关系。从图9可见:只考虑捣镐所需的激振力为4 kN,在80 Hz激振频率状况下,激振缸需产生的力为20 kN;在考虑捣镐最大夹持力的影响即所需捣镐的激振力为16 kN时,激振缸所需要产生的力为60 kN。捣镐夹持力越大,所对应需要产生的激振力也越大,且在一个周期内,力呈现出从大到小又从小到大的变化规律。

图9 80 Hz频率时激振缸所需力的对应关系
4 结论
1) 新捣固机捣固臂的结构实现了随着激振液压缸振幅和振动频率的改变,捣镐振幅和振动频率也随着改变的目标。当激振缸振幅为0.002~0.004 mm时,捣镐振幅为0.004~0.008 m,且振动频率可以相应地调节,实现了捣镐所期望的振幅和频率,满足了不同工况的要求。
2) 通过对捣固臂的建模分析,确定了装置中主要的结构尺寸及激振液压缸所需产生力的范围,其中,所需捣镐激振频率越高,所需要激振液压缸的激振力越高。
3) 新机械结构特点在于:新捣固臂采用柔性激振的方式,有利于延长捣镐的使用寿命;独立的液压激振机构使得捣镐产生激振,克服了捣镐振动产生夹持液压缸晃动的缺陷;捣固臂中的捣镐振动频率和幅值连续可调,能更好地适应不同的工况,提高作业精度。
[1] 寇长青, 周海浪. 铁道工程施工机械[M]. 北京:机械工业出版社, 2001: 124−250.KOU Changqing, ZHOU Hailang. Machinery on railway construction[M]. Beijing: Machine Industry Press, 2001: 124−250.
[2] 刘毅, 龚国芳, 闵超庆. 捣固机械激振技术现状与展望[J]. 机械工程学报, 2013, 49(16): 138−146. LIU Yi, Gong Guofang, MIN Chaoqing. Present status and prospect of tamping device exciting technology[J]. Journal of Mechanical Engineering, 2013, 49(16): 138−146.
[3] LIU Yi, GONG Guofang, YANG Huayong, et al. Mechanism of an electro-hydraulic exciter for a new tamping device[J]. Journal of Central South University, 2014, 21(2): 511−520.
[4] Josef T. Ballast tamping machine and method for tamping a railway track: Austria, 1403433A3[P]. 2004−05−26.
[5] Josef T. Tamping machine: Austria, 1387003A2[P]. 2004−02−04.
[6] Yvo C S, Yvan D. Railway track tamping device: Switzerland, 0050889A1[P]. 1982−05−05.
[7] GANZ J. Railway ballast tamping machine: Switzerland,0424322A1[P]. 1991−04−24.
[8] Sandsted C A, Moore R J, Delu Cla A P, et al. Split tool mechanical vibrator: America, 5584248[P]. 1996−12−17.
[9] John M, Peter Y. Single shaft tamper with reciprocating rotational output: America, 6386114[P]. 2002−05−14.
[10] 韩志青. 捣固装置的振动分析[J]. 工程机械, 1997, 28(9): 19−21. HAN Zhiqing. Vibration analysis for tamping device[J]. Construction Machinery and Equipment, 1997, 28(9): 19−21.
[11] 李毅松, 翁敏红. D09−32型捣固装置的结构﹑功能及运动分析[J]. 机车车辆工艺, 2003(2): 4−7. LI Yisong,WEN Minhong. Analysis of structure, function and movement on type D09−32 tamping unit[J]. Locomotive & Rolling Stock Technology, 2003(2): 4−7.
[12] 高兵, 王有虹. CD08−475型捣固装置的结构原理分析[J]. 机车车辆工艺, 2005(4): 27−29. GAO Bin, WANG Youhong. Analysis of the structure of CD08−475 tamping unit[J]. Locomotive & Rolling Stock Technology, 2005(4): 27−29.
[13] 应立军, 李云召. 新型捣稳一体化捣固装置的研究[J]. 工程机械, 2008, 39(6): 20−23. YING Lijun, LI Yunzhao. Research on a new type tamping device integrating tamper and stabilizer[J]. Construction Machinery and Equipment, 2008, 39(6): 20−23.
[14] 胡垠, 胡军科, 方健康. 捣固车捣固装置夹持液压系统压力平稳性研究[J]. 铁道科学与工程学报, 2014, 11(3): 146−150. HU Yin, HU Junke, FANG Jiankang. Research on pressure stability of clamping hydraulic system in railway tamping device[J]. Journal of Railway Science and Engineering, 2014, 11(3): 146−150.
[15] 张明, 李耀雄, 孙璐. 捣固镐激振力评测方法研究[J]. 铁道建筑, 2013(9): 114−116. ZHANG Ming, LI Yaoxiong, SUN Lu. Research on evaluation method of tamping picks exciting force[J]. Railway Engineering, 2013(9): 114−116.
[16] 王友勇. 08/09−32型捣固车捣固装置改造设计[J]. 铁道建筑, 2014(2): 113−115. WANG Youyong. Reformation design on type 08/09−32 tamping unit[J]. Railway Engineering, 2014(2): 113−115.
[17] 龚国芳, 杨林勇, 刘国斌, 等. 一种液压激振与夹持运动独立的捣固装置: 中国, 201010104672.9[P]. 2010−01−29. GONG Guofang, YANG Linyong, LIU Guobin, et al. A new type of tamping device with hydraulic excitation and independent clamping movement: China, 201010104672.9[P]. 2010−01−29.
[18] 龚国芳, 刘毅, 刘国斌, 等. 液压激振器专用旋转换向阀: 中国, 201020100669.5[P]. 2010−01−19. GONG Guofang, LIU Yi, LIU Guobin, et al. A new spin valve for electro-hydraulic exciter: China, 201020100669.5[P]. 2010−01−19.
(编辑 罗金花)
Kinetic analysis of new tamping arm
LIU Yi1, 2, GONG Guofang2
(1. Ningbo Institute of Technology, Zhejiang University, Ningbo 315100, China;2. State Key Laboratory of Fluid Power Transmission and Control, Zhejiang University, Hangzhou 310027, China)
According to the technical parameters of the existing tamping unit and the mechanism analysis of tamping arm, a new mechanical design was completed. Then, a size of the device’s main structure and the working parameters were determined. Taking advantage of virtual prototyping technology and simulation software platform Pro/E, a virtual prototype of the new tamping unit was created and kinematics simulation was carried out. The results show that the new tamping machine which adopts hydraulic vibration technology of load sensing and stepless regulation of operating parameter can improve the wear of tamping bar by forced vibration and the strong swing drawback of the clamping cylinder.
tamping machine; tamping arm; mathematical modeling; structural modeling; design analysis
10.11817/j.issn.1672-7207.2015.09.007
U216.63+1
A
1672−7207(2015)09−3211−06
2014−12−23;
2015−02−28
浙江省自然科学基金资助项目(LQ15E050009);国家自然科学基金资助项目(51275499);流体动力与机电系统国家重点实验室开放基金资助项目(GZKF-201312) (Project(LQ15E050009) supported by the Natural Science Foundation of Zhejiang Provincial of China; Project(51275499) supported the National Natural Science Foundation of China; Project(GZKF-201312) supported by the Open Foundation of the State Key Laboratory of Fluid Power Transmission and Control)
龚国芳,教授,从事电液控制系统研究;E-mail: gfgong@zju.edu.cn
猜你喜欢
装备维修技术(2022年7期)2022-07-01
振动与冲击(2022年10期)2022-05-30
重型机械(2020年2期)2020-07-24
再生资源与循环经济(2019年6期)2019-01-21
制造技术与机床(2017年5期)2018-01-19
电子制作(2017年7期)2017-06-05
股市动态分析(2016年24期)2017-01-07
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年4期)2016-09-29
