
馒头胚自动摆盘机设计与研究
2015-12-20 06:27郝用兴张明慧马子领马少丹华北水利水电大学机械学院河南郑州450011
食品与机械 2015年5期
郝用兴 张明慧 马子领 马少丹(华北水利水电大学机械学院,河南 郑州 450011)
馒头加工所用的设备主要由加水罐、和面机、压面机、提升机、成型机、整形机、摆盘机、醒发箱、蒸柜及辅助设备组成。在馒头的实际生产中,和面机、成型机、醒发箱、蒸柜的使用已经非常普遍,而馒头胚的摆盘工作还是以人工摆放为主,馒头的自动摆盘技术还非常短缺。由此可见,研发出一种可代替人工进行摆盘的馒头胚自动摆盘机显得非常必要。
馒头胚自动摆盘机已有旋转推板式生面团自动排放机和旋转溜管式生面团自动排放机两种形式[1,2]。前者摆放后的馒头胚不整齐,实际使用中还需要人工整理;后者由于馒头胚是顺着管道滚落下来的,仅适合圆形馒头。基于上述两种方案的特点,本研究提出一种结构简单、价格低廉、既适合圆形馒头又适合方形馒头,且摆放整齐的馒头胚自动摆盘机,可以将从馒头成型机生产出来的各种形状的馒头胚整齐地成排放置到托盘中。
1 机构方案
1.1 应用环境
摆盘机紧随成型机之后工作,可以将成型后的馒头胚自动抓取、摆放到托盘上。所以机构方案需要按照成型机的参数进行设计。
摆盘机结构设计的主要依据:① 馒头胚的大小;② 成型机输送出来的馒头胚之间的间距;③ 馒头成型机的生产率;④ 成型机的外形尺寸。
目前,市场上馒头成型机的制品重量为30~250g,查文献资料[3]知馒头面团的密度为ρ=1.17g/cm3,则馒头面团的体积为25.64~213.68cm3。根据公式v=a3得出,a=2.95~5.98cm,于是以尺寸为60mm×60mm×60mm的方馒头为抓取对象。
从成型机输送出来的馒头胚之间的间距约为10mm。
在馒头加工企业中,考虑到人工摆放馒头胚的速率,成型机的生产率为1个左右。本机以成型机的生产率2个为设计依据。
目前市场上投入使用的、普遍的成型机的外形尺寸为:4 520mm×650mm×1 460mm。
1.2 设计方案
摆盘机的工作要求是将成型机生产出来的馒头胚整齐地成排放置到馒头托盘中。
抓取和放置是模仿人手进行馒头胚摆盘所必须有的动作。
为了保证放置于托盘上的馒头胚拥有合理的间距,摆盘机需要有一个增加相邻馒头胚间距的动作(即分距)。
由于馒头胚质地松软,在托盘的移动过程中,极易发生倾倒、翻转的状况。为了保证馒头胚状态的稳定,摆盘机需要有一个向下按压馒头胚的动作(即按压)。
因此,通过设计一个模仿人手抓取馒头的长条弧形板手指,并兼有抓取、分距、放置、按压等功能的机械手爪,再由一个可以带动机械手爪进行快速移动的移动机构,实现馒头胚抓取、放置的连续动作。
1.3 工作原理
馒头胚自动摆盘机工作原理见图1,成型后的馒头胚4呈直线排列,随成型机的输送带6沿着V1方向移动;当6个馒头胚通过了光电传感器5时,给机械手爪7一个信号使其抓取馒头胚4,然后移动机构3带动机械手爪7移动到托盘1上方,并将馒头胚4放置到托盘1上。接着移动机构3带动机械手爪7回到初始位置等待下一次抓放,同时放置托盘的输送带2沿着V2方向移动一定距离并停止,至此完成一个工作循环。当一个托盘摆满以后,由人工将托盘移走。

图1 馒头胚自动摆盘机工作原理Figure 1 Working principle diagram of dough wobble-plate machine
2 结构设计
馒头胚自动摆盘机主要由机架、移动气缸、手爪、托盘及输送机A、B组成(见图2),其中手爪是本机的核心部分。
2.1 机架
机架安装在输送机A和输送机B上,用于固定移动机构,实现馒头胚抓取工作的平稳进行。
2.2 移动气缸
移动气缸安装在机架上,可带动手爪进行往复运动,实现馒头胚的快速移动。本机的移动气缸为无杆气缸。
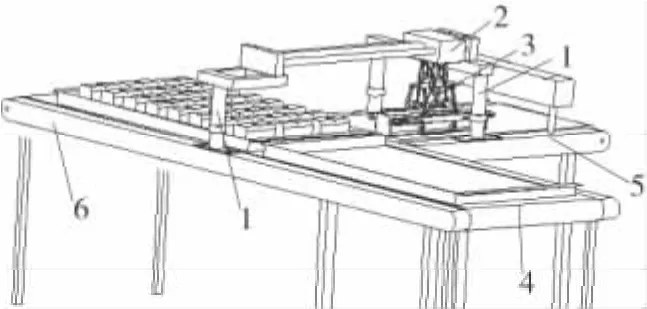
图2 馒头胚自动摆盘机结构Figure 2 The structure of dough wobble-plate machine
2.3 手爪
手爪固定在移动气缸的滑块上,由底板、支撑架、手爪开合机构、压板、馒头夹板、夹板同步连接器、抓取气缸、按压气缸、分离气缸构成(见图3)。气缸带动连杆运动使手爪开合,实现馒头胚的抓取、分距、放置和按压的动作[4-6]。
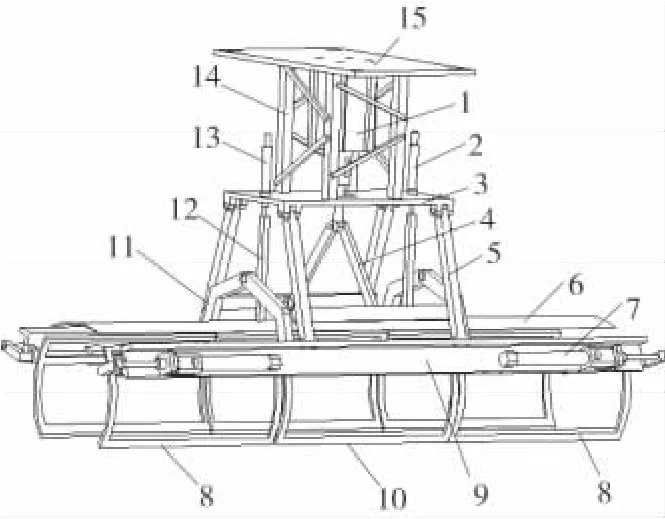
图3 机械手爪结构Figure 3 The structure of manipulator
底板用于连接手爪和移动机构;支撑架是手爪的骨架;手爪开合机构完成抓取、放置动作;馒头压板用于馒头放置时向下按压馒头以保证馒头放到托盘上后状态稳定不翻倒;馒头夹板用于夹取馒头,由3节组成,两端的两节在分离气缸的带动下可以向两侧移动一段距离,以保证馒头放置后拥有合理的间距;夹板同步连接器有两个,每个由两个连杆通过销连接组合而成,用于保证两侧的可动夹板同步移动;抓取气缸、按压气缸、分离气缸是驱动部件,用于驱动相应的执行部件。
2.4 托盘
托盘只有三面有边沿,以方便手爪通过,可以放置8排馒头,每排6个。
2.5 输送机
输送机A为成型机的输送装置,用于输送成型机中切割好的馒头胚。输送机B平行并略低于成型机的输送机A,用于放置托盘并带动托盘向前移动。
3 驱动控制设计
气动系统通常由能源装置、执行装置、控制调节装置、辅助装置及传动介质等组成[5]。本研究中气缸为执行装置,电磁阀为控制装置。气缸由电磁阀控制,具有简单易用,安装方便、反应速度快等优点。
3.1 工作过程
根据自动摆盘机的基本结构和工作原理,其工作流程图见图4。
3.2 气动控制系统设计
馒头胚自动摆盘机的抓取、移动、分距、放置、按压等动作,均可采用节流调速阀调速回路来实现,采用共同气源供气,形成的气动系统图见图5[7-9]。其工作原理:当电磁阀YAi(i=1~8)得电时,气源经工作压力控制回路后,经电磁阀n(n=13~16)后,气流再经单向节流阀m(m=1~8)进入气缸p(p=9~12)左腔或右腔,推动气缸杆伸出或缩回。

图4 自动摆盘机工作流程图Figure 4 The flow chart of wobble-plate machine

图5 自动摆盘机的气压传动系统Figure 5 The pneumatic system schematic of wobble-plate machine
4 仿真试验
将本机的三维模型导入ADAMS中,按照实际情况设定样机相关参数[10-12],得到馒头胚自动摆盘机虚拟样机模型(见图6)。通过ADAMS运动仿真,可以绘出机械手爪某一点在抓取过程中的位移曲线(见图7),从位移曲线上能够简单直观地看出,手爪的抓取过程平稳,能够保证馒头胚自动摆盘机的可靠性和可行性。因此可以得出:机构的设计方案能够满足自动摆盘机所需的功能要求。

图6 自动摆盘机虚拟样机模型Figure 6 The wobble-plate machine virtual prototype model

图7 机械手爪的位移曲线Figure 7 The displacement curve of gripper
采用计算机虚拟仿真试验及理论分析计算,得到本机的主要技术参数为:产能7 200个/h,功率17kW,耗气量638dm3/min,外形尺寸1 058mm#2 000mm#1 082mm,成品率100%。
5 结论
结合摆盘机的功能需求,完成了馒头胚自动摆盘机设计与研究。本机具有结构简单,适应性广,整个装置可拆卸、更换零件,具有较长的使用寿命等特点,能一次摆放到位整齐。运用气压原理,对整机进行驱动控制设计,采用气压驱动,简化了结构,降低了成本,并且气压驱动方式非常适合多机共用一个气源的工厂生产模式。该机与成型机配套使用后,可以代替人工进行馒头胚的摆盘工作,满足馒头生产中对安全卫生、节省人力和提高效率的要求。
1 周全申,朱庆方,朱克庆.旋转溜管式生面团自动排放机[J].郑州粮食学院学报,1999,20(1):22~24.
2 周全申,朱克庆,李广玉.旋转推板式生面团自动排放机构[J].郑州粮食学院学报,1998,19(1):41~44.
3 李彦蓉.馒头成型机的研究与设计[J].农机化研究,2008(4):111~113.
4 黄贤新.工业机器人机械手设计[J].装备制造技术,2012(3):220~221.
5 Pettersson A,Davis S,Gray J O,et al.Design of a magnetorheological robot gripper for handling of delicate food products with varying shapes[J].Journal of Food Engineering,2010,98(3):332~338.
6 Bhagata U,Shirinzadeha B,Clark L,et al.Design and analysis of a novel flexure-based 3-DOF mechanism[J].Mechanism and Machine Theory,2014,74:173~187.
7 左健民.液压与气压传动[M].北京:机械工业出版社,1999:4~5.
8 张萍萍.基于PLC的气动机械手控制系统设计[D].四川:电子科技大学,2013.
9 李常品,曾胜,康成良.两工位全自动平衡机气动控制系统的设计[J].组合机床与自动化加工技术,2008(10):64~67.
10 管小清,吕志强.工业码垛机器人动力学仿真分析与研究[J].食品与机械,2013,29(1):149~151.
11 陈赛克,凌轩.基于Solidworks齿轮连杆机构的运动仿真[J].食品与机械,2012,28(6):177~179.
12 张少文,吴学梅.新型烹饪机器人锅具运动机构的设计及运动学仿真[J].食品与机械,2013,29(4):92~94.
猜你喜欢
装备制造技术(2019年6期)2019-08-15
电子制作(2018年24期)2019-01-03
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2018年9期)2018-09-19
河北农机(2017年12期)2018-01-20
荣誉杂志(2017年7期)2017-08-23
制造技术与机床(2017年4期)2017-06-22
中国铸造装备与技术(2017年3期)2017-06-21
山东工业技术(2016年15期)2016-12-01
工业设计(2016年6期)2016-04-17
