
一种低频旋转磁场仪的设计
2015-12-20 03:07任郁苗陆文总孟祥艳潘海仙
医疗卫生装备 2015年4期
任郁苗,陆文总,孟祥艳,潘海仙
一种低频旋转磁场仪的设计
任郁苗,陆文总,孟祥艳,潘海仙
目的:为了更方便、可靠地研究旋转磁场的生物效应,设计一种低频旋转磁场仪。方法:利用单片机控制步进电动机,带动永磁铁产生旋转磁场,实现步进电动机驱动模块、键盘控制模块、显示模块和串口通信模块以及测速模块等的软硬件设计。结果:该低频旋转磁场仪达到了转速频率范围为1~10 Hz、转速精度为±5%的设计要求,可精确定位刺激部位,用于小面积照射。结论:该低频旋转磁场仪工作稳定可靠、频率精度高、操作简便,可广泛用于低频旋转磁场生物效应的研究和实验。
低频旋转磁场;磁场生物效应;单片机;步进电动机
0 引言
生物的磁效应已经是不争的事实。电磁场的生物效应研究虽然历史悠久,但是科学、系统的研究始于19世纪末期,至今仍然是生物医学的一个研究热点。目前国内外对于旋转磁场的生物效应的研究已取得了不少的成果。已有实验研究低频旋转磁场对于肿瘤细胞、微循环系统、心血管系统、神经系统、组织和损伤恢复、骨骼生长等方面的影响[1-6],这些低频旋转磁场生物效应的研究为临床磁场疗法提供了可靠的实验依据及理论基础。
要研究旋转磁场的生物效应,就要有能够产生旋转磁场的仪器。根据实验要求,需要产生频率为1~10 Hz、转速精度为±5%的低频旋转磁场。产生旋转磁场的方法多种多样,总的来说分为两大类:一类采用交变电流流过线圈合成旋转磁场[7-11],采用这种方法产生3 000 G(1 G=10-4T)左右的磁场需要的线圈的体积很庞大,难以精确定位刺激部位,无法用于小面积照射的磁刺激实验;另一类旋转磁场采用永磁体旋转产生,通常利用直流伺服电动机带动永久磁铁旋转来产生[12-13],但是直流电动机的转速易受外界控制电压、阻力等因素的影响,使其产生的旋转磁场的频率精度不够。而步进电动机具有转速稳定、易于控制等特点,本文利用单片机来控制步进电动机,研制带有测速功能的高精度的低频旋转磁场仪。
1 旋转磁场的设计方法与工作原理
该系统主要以单片机为核心控制步进电动机,实现高精确且具有良好稳定性的旋转磁场。该仪器的整体设计方法就是把强度不同的磁铁,通过固定装置固定在步进电动机的转轴上,当电动机转动时,就会带动磁铁旋转,从而产生旋转磁场。因而旋转磁场产生的旋转频率由步进电动机的转速决定,旋转磁场的磁场强度由永久磁铁产生的磁场强弱决定。
1.1 永磁铁磁场强度的计算方法
由安培分子环流假设可知,永磁体经过均匀磁化以后,其内部的分子电流效应相互抵消,磁体整体呈现出只存在表面电流,而磁体内部电流不存在的现象。根据比奥-萨戈尔定理,表面电流产生的空间磁感应强度为[14]式中:μ是磁体在真空中的磁导率;k(z′)为表面电流的密度向量;z为磁场空间点的坐标;z′是原点的空间坐标;ez为单位矢量;s为电流的表面分布区域。根据上式就可以计算出单个永磁体在空间任意点的磁感应强度。

1.2 步进电动机细分驱动控制
步进电动机由于自身的设计缺陷,存在低频时产生振荡、高频时又容易失步的问题,导致采用步进电动机设计的旋转磁场不稳定,系统噪音较大,因此在采用步进电动机带动永磁铁产生旋转磁场时,选择什么样的驱动方法来解决上述问题,提高系统的稳定性和运行性能,是必不可少的一环。根据前人的经验和研究结果,本系统采用细分驱动方法,经过实践,发现控制驱动的细分量可以使步进电动机低频振荡的问题得到有效的解决,大大降低仪器运行时的噪音。
整步驱动时,[0°,90°)的步进电动机总有效电磁转矩为

细分驱动时,[0°,90°)的总有效电磁转矩为

由式(2)和(3)得到细分驱动与整步驱动时的总有效电磁转矩之差为
分析比较步进电动机细分驱动和整步驱动时形成的电磁转矩,说明通过调整驱动的细分量可有效增大步进电动机的电磁转矩,减小电磁转矩的波动幅度,使电磁转矩波动的频率显著增大,表明采用调整步进电动机驱动细分量的方法可以使步进电动机低频振荡和高频容易失步等缺点得到有效改善,使其运行性能得到明显提高。
2 系统的电路设计
本系统以AT89C51单片机芯片作为核心,通过单片机产生脉冲序列,控制单片机输出脉冲的频率,从而控制步进电动机的转速,同时通过测速系统测出电动机的转速。通过键盘控制模块进行步进电动机的转速、方向、控制模式以及定时时间的设置;显示模块主要用来显示步进电动机的脉冲频率、方向。本系统还可以实现电动机的手动和自动2种控制模式。在手动控制模式下,电机一直运行直到按下停止键。自动控制模式可以通过定时控制电动机的运行时间,设定好运行时间之后,电动机就会按照设定的时间运行,当定时时间到,停止运行,这为此仪器的使用带来了很大的方便。其系统总体设计框图如图1所示,主要包括电动机驱动电路、电动机测速电路、控制键盘部分、人机交互显示部分的设计和通信模块的设计。下面将对各主要模块的具体设计进行详细介绍。

图1 系统总体框图
2.1 电动机驱动模块
本系统采用集成达林顿管ICULN2003A作为功率驱动芯片,使用功率芯片与单片机相连时还需要增加限流电阻。其硬件设计原理图如图2所示。单片机的P1.5、P1.6、P1.7、P3.6 4个引脚分别通过非门芯片7404控制步进电动机的驱动芯片ULN2003A,图中的R9~R12即为限流电阻。

图2 步进电动机驱动电路模块
此旋磁控制系统的步进电动机为四相六线形式的步进电动机。四相六线步进电动机一共有6根引线,4个相序分别为A、B、C、D。步进电动机通过脉冲控制来改变转速和方向,脉冲控制有四相单四拍、四相双四拍、四相八拍等方式。每种脉冲控制方式都有其缺点和优势。总的来说,四相八拍脉冲控制方式与其他方式比较,步距角减小了1/2,有利于削弱步进电动机的低频振荡、降低噪声,同时提高步进电动机的带负载能力。由于旋转磁场仪主要用于生物实验,对噪声要求较高,通过比较,本系统采用四相八拍的励磁顺序对步进电动机进行控制。实际编写程序时,对A、B、C、D 4个相位用二进制数字0、1建立导通顺序,从而建立四相八拍的控制模式,当通过“AAB-B-BC-C-CD-D-DA”顺序控制步进电动机运转的时候,电动机正转;反之,电动机反转。其系统仿真波形如图3、4所示。

图3 正转时A、B、C、D 4个相位产生的脉冲波形

图4 反转时A、B、C、D 4个相位产生的脉冲波形
2.2 测速模块
测速模块采用3144速度传感器[15],此传感器的应用原理是霍尔效应,其设计方法是通过在电动机转轴上的转盘固定磁钢,转盘随着电动机轴旋转,同时带动磁钢旋转,在转盘下方安装一个霍尔器件,磁钢随固定在电动机上的转盘旋转时,所产生的磁场就会随之发生变化,霍尔器件感应到磁钢磁场的变化输出脉冲信号,其频率和旋转速度成正比。脉冲信号的周期与电动机的转速有以下关系:

式中:N为电动机每分钟的转速;p为电动机转一圈的脉冲数;t为输出方波信号周期。根据式(5)可以得出电动机每分钟的转速。在测量电动机转速的时候,把霍尔开关产生的脉冲送入单片机中,获得脉冲数,再通过上面的公式将转速计算出来,然后送到数码管显示转速,完成转速测量。
2.3 键盘控制模块
本系统的按键共有16个,包括0~9 10个数字键,上移、下移键,左移、右移键,确定和停止键。各按键的功能分别为:10个数字键用来选择电动机控制频率;左移和右移键用来移动光标,选择要设置参数的位置;上移和下移键用来设置电动机的方向和控制模式,其中上移键用来选择电动机正转,控制模式为手动控制,下移键表示电动机的方向为反转,控制模式为自动控制;确定键用来启动电动机运行,停止键停止电动机运行。其程序流程如图5所示。

图5 键盘扫描子程序流程图
3 测试结果
利用该系统的测速模块对步进电动机的转速进行测试,要求步进电动机转速误差不超过±5%,在600 r/min(10 Hz)时,转速误差不超过±5%;转速在60 r/min(1 Hz)时,误差不超过±5%。测试结果见表1。
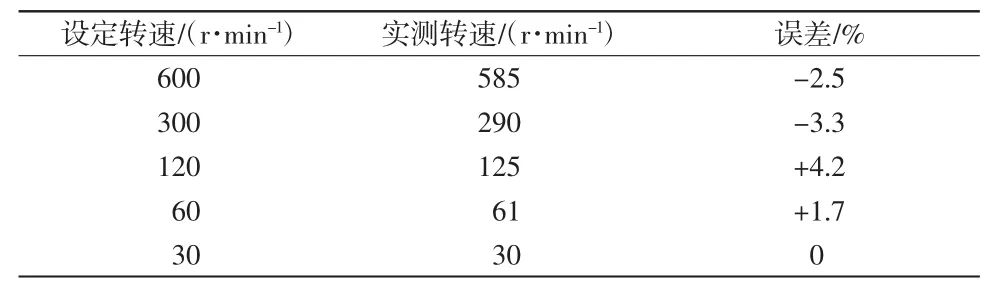
表1 测试数据
在表1中,当步进电动机转速设为600 r/min(10Hz)时,实测转速相对于设定转速的误差为-2.5%;转速在60 r/min(1 Hz)时,实测转速相对于设定转速的误差为1.7%。显然,此低频旋转磁场仪达到了转速频率范围为1~10 Hz、转速精度为±5%的设计要求。
4 结论
结合目前低频旋转磁场在临床磁疗方面的应用,本文设计的低频旋转磁场仪利用永磁体产生的高强度旋转磁场,具有体积小、聚焦精度高的优点,可用于小面积磁刺激场合;采用高精度和稳定度的步进电动机取代了常用的直流伺服电动机产生旋转磁场,并且带有测速模块,可以精确地测量和控制旋转磁场的频率;同时该仪器采用单片机控制,可以进行磁场频率、方向和手动/自动模式的设置和显示,操作方便、实用新颖,可广泛应用于低频旋转磁场生物效应的实验和研究。
(▶▶▶▶)(◀◀◀◀)
[1] Gmitrov J,Ohkubo C,Okano H.Effect of 0.25T static magnetic field on microcirculation in rabbits[J].Bioelectromagnetics,2002,23(3):224-229.
[2] LI Yi,ZHAO L,XING X,et al.Effects of different frequency electromagnetic fields on the differentiation of midbrain neural stem cells[J]. Space Med Med Eng,2002,15(5):374-376.
[3] 宋国丽.不同频率旋转磁场对放射损伤小鼠的保护及造血作用恢复的研究[J].中国康复医学杂志,2006,21(8):689-692.
[4] ZHANG Yu,ZHANG Xiao-yun.Effect of rotating magnetic field on bone calcium metabolism in rat[J].Chinese Journal of Clinical Rehabilitation,2005,9:193-196.
[5] 韦淑贞,谢学军,郭国祯.旋转磁场对放射损伤小鼠血清自由基的影响[J].中国组织工程研究与临床康复,2008,12(22):4 279-4 282.
[6] Erdal N,Gurgul S,Tamer L,et al.Effects of long-term expextremely low frequency magnetic field on oxidative/nistrosative stress in rat liver[J].J Radiat Res,2008,49(2):181-187.
[7] 简小云,梅涛,汪小华.胶囊内窥镜机器人的外磁场驱动方法[J].机器人,2005,27(4):367-373.
[8] 张永顺,刘巍,郭锐,等.无缆微型游动机器人驱动磁场系统的研究[J].机器人,2005,27(1):63-67.
[9] 黄永红,徐晓斌,陈照章,等.生物体低温保存用低频磁场发生装置的研制与应用试验[J].农业工程学报,2007,23(8):150-154.
[10]陈树君,王学震,华爱兵,等.磁控电弧旋转磁场发生装置[J].电焊机,2006,37(5):47-50.
[11]郭景涛,张一萌,金志刚,等.基于矢量合成的静止式旋转磁场试验装置[J].计量学报,2010,31(3):193-199.
[12]张炜,黄平,孟永钢.阵列永磁体产生旋转磁场的机理及实验[J].工程设计学报,2008,15(3):191-197.
[13]陈龙聪,刘改琴,刘亚涛,等.数控旋转磁场仪的研制及应用[J].重庆医科大学学报,2008,33(5):618-621.
[14]倪光正.工程电磁学原理[M].北京:高等教育出版社,2002:128.
[15]任郁苗,廉毅.医用冷冻离心机的研制[J].医疗卫生装备,2010,31(6):26-28.
(收稿:2014-07-06 修回:2014-12-01)
Design of low-frequency spinner magnetometer
REN Yu-miao,LU Wen-zong,MENG Xiang-yan,PAN Hai-xian
(School of Electronics and Information Engineering,Xi'an Technological University,Xi'an 710021,China)
ObjectiveTo design a low-frequency spinner magnetometer to explore the bio effect of rotating magnetic field. MethodsSCM was used to control stepping motor,and then permanent magnet was driven to generate rotating magnetic field.The design was completed for the hardware and software of driver module for stepping motor,keyboard control module,display module,serial communication module and speed measuring module.ResultsThe magnetometer met the desired requirements for rotating frequency from 1 to 10 Hz and precision of±5%,which could locate the stimulation position accurately for small-area irradiation.ConclusionThe magnetometer has high reliability,high frequency accuracy and easy operation,and thus can be used for the study and experiment on the bio effect of low-frequency rotating magnetic field.[Chinese Medical Equipment Journal,2015,36(4):16-18,28]
low-frequency rotating magnetic field;biological effect of magnetic field;SCM;stepping motor
R318;TH772.1
A
1003-8868(2015)04-0016-04
10.7687/J.ISSN1003-8868.2015.04.016
西安工业大学校长基金科研项目(XAGDXJJ1313);陕西省教育厅专项科研计划项目(14JK1341)
任郁苗(1977—),女,讲师,主要从事生物医学电子与仪器、自主神经系统功能评价与调控、电子信息技术方面的研究工作,E-mail:yumiaoren @163.com。
710021西安,西安工业大学电信学院生物医学工程系(任郁苗,陆文总,孟祥艳,潘海仙)
猜你喜欢
数学物理学报(2022年3期)2022-05-25
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
中成药(2017年12期)2018-01-19
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
