面向大规模电动汽车并网的需求侧管理方案对比分析
2015-12-19 03:15詹晓晖高玉明张华栋
华北电力大学学报(自然科学版) 2015年3期
曾 鸣,詹晓晖,史 慧,高玉明,郭 亮,张 健 张华栋
(1.华北电力大学经济与管理学院,北京102206;2.国网山东省电力公司,山东济南 250000)
0 引言
随着石油资源的日趋枯竭以及环境污染的不断加剧,世界各国均面临较为严重的能源与环境危机,汽车工业带来的能源短缺、环境污染问题日益突出[1]。电动汽车作为新能源开发利用的突出代表,已经成为取代传统动力汽车、引领汽车行业新时代的重要发展方向[2]。然而,由于电动汽车充电在时间和空间上都存在着不确定性,大量的电动汽车接入电网可能会导致电网的高峰时段负荷明显上升,若缺少有效管理形成无序随机充电,缺乏与电网的双向能量互动,将对电网的安全运行、有功平衡和频率控制带来严重挑战[3,4]。因此很有必要研究电动汽车接入电网的运行规律并对其实施需求侧管理。
目前,国内外对电动汽车需求侧管理的研究主要集中在对电动汽车充放电调度及控制问题上[5,6]。电动汽车充放电负荷作为智能电网的重要组成部分具有复杂的特性,一方面是因为用户的使用习惯以及电动汽车充电特性存在差异性和随机性,另一方面还与电动汽车充电设施及充电控制水平有关[7-9]。文献[10]发展了以配电系统损耗和电压偏移最小化为目标的电动汽车最优充电策略模型,研究表明:通过协调控制电动汽车充电行为可以显著提高电能质量。在对电动汽车充放电调度和控制的已有研究文献中,大都假设系统运行人员能够实现电动汽车的充放电行为的直接控制,但是这在实际应用中很难实现。因此,在智能电网快速发展的大背景下,实现对电动汽车充电的智能控制将是电动汽车需求侧管理的发展趋势。
为了解决电动汽车入网所引起负荷变化问题,本文以插电式混合动力汽车(Plug-in Hybrid Electric Vehicle,PHEV)为研究对象,针对接入家庭住宅的电动汽车并网充电提出两种需求侧管理方案:基于中央调度程序的二次规划调度方法和基于能量限制器和功率限制器的多智能体系统调度方法,并对某典型地区配电网络中的电动汽车进行仿真分析,通过对插电式混合动力汽车入网引起的负荷需求增长问题进行评估和量化,对比二次规划调度方法和多智能体系统调度方法的优劣。
1 二次规划调度方法
由于二次规划适用于解决满足线性约束的多个变量的二次函数优化问题,故该节把电动汽车的需求侧管理问题转换到二次规划之中,通过二次规划的方法实现对电动汽车的优化调度。图1为基于中央调度程序的电动汽车调度流程图。为实现电动汽车充电的最优调度,需要搜集一天之中所有电动汽车的未来行为状态(离开时间,到达时间和行驶时间),再将这些数据汇报给调度中心的决策者,调度中心据此提出调度方案,然后再次反馈给电动汽车。
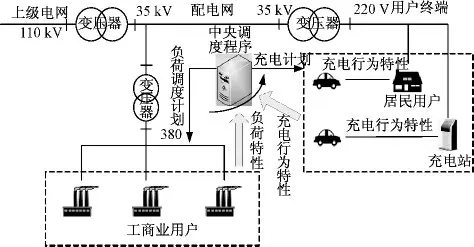
图1 基于中央调度程序的电动汽车调度流程Fig.1 Electric vehicle scheduling process based on central scheduler
在构建的二次规划问题中需要进行优化的变量是每辆PHEV 每个时刻的充电功率,如式(1)所示:

式中:Pst为第s 辆PHEV 在第t 时刻的充电功率变量,变量个数为M×N;Pmax为PHEV 在家庭配网中充电功率的最大值。如果PHEV 不在家庭住宅中充电,那么最大充电功率设定为无限大。
在二次规划调度方法下,最优调度方案应该能够使得配电网中的每个变压器的负荷曲线更加扁平化。而使负荷曲线扁平化的方法就是通过优化调度尽可能的缩减负荷的波动。选取总负荷方差的最小化作为PHEV 的二次规划调度的目标函数:
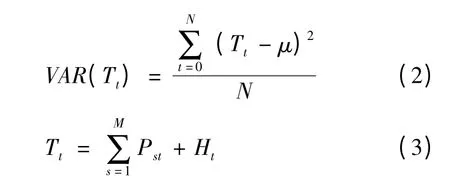
式中:Tt为第t 时刻高压变压器的总负荷;μ 为负荷均值;Ht为第t 时刻的其他负荷。
除了家庭配网对充电功率的约束外,电动汽车蓄电池容量也是充电功率的约束因素,如式(4)所示,其中最小值约束可以保证电动汽车达到充分的充电状态以维持一定的汽车行驶时间或距离。

式中:Pst,max、Pst,min为PHEV 蓄电池容量限制的最大值和最小值。
2 多智能体系统调度方法
该节提出基于分布式多智能体系统的调度方法。首先,对多智能体系统做了简要概述,在每台变压器馈线辐射范围内,多智能体可以起到平抑负荷的作用;其次,分别从能量限制器和功率限制器两方面构建多智能体系统的协调机制,解决电动汽车行为不可预测这一问题。
2.1 多智能体系统综述
多智能体系统的原理概述如图2所示,其中PA 表示PHEV 智能体,就是协调控制该电动汽车的软件程序;TA 表示变压器智能体,控制着一台变压器。两种智能体目的有所不同,PA 为了保证对应的电动汽车蓄电池及时充电;而TA 的目的是平抑变压器馈线下的负荷,防止出现过载现象。但是这些目标并不是各自独立地完成,而是通过各个智能体之间的沟通合作、协调调度来实现整个系统的目标。例如,对于一个蓄电池电量为零的PA,系统不会允许其在一个小时内充满电,因为这样可能会造成相应低压变压器过载。
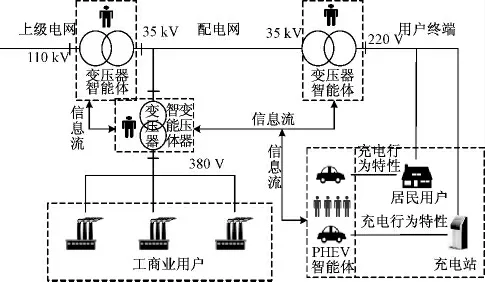
图2 多智能体系统原理概述Fig.2 Principle overview of the multi-agent system
2.2 多智能体系统的协调机制
多智能体系统的基本协调机制是在同一配电网络中PA 与TA 之间进行的,包含四个步骤(见图3)。

图3 多智能体系统协调机制Fig.3 Coordination mechanism of multi-agent system
(1)PA 向TA 发出充电请求信号;
(2)由TA 单独决定该电动汽车的充电功率,以最有效地平抑变压器负荷;
(3)各TA 之间相互协调决定充电功率使得所有的变压器负荷得到最优的控制;
(4)低压变压器端的TA 向PA 反馈一个经过所有TA 协商之后都能接受的电动汽车充电负荷。
所有PA 相互独立地以一个固定的频率向TA发送一个是否充电的信号,这样是为了保证TA 能够实时了解各PA 的需求。基于多智能体的基本协调机制提出了两种相应的协调策略,即能量限制器协调策略和功率限制器协调策略。
2.2.1 能量限制器
能量限制器是针对电动汽车接入电网时的能源预定提出的。这就需要进行一些预测数据,TA需要预测变压器范围内的住宅负荷,而PA 则需要电动汽车的蓄电池状态数据和预期离开住宅的时间。后者可以通过数据挖掘技术实现,而住宅负荷可以通过分析历史数据得到。在能量限制器协调策略中,PA 发出充电功率需求的过程如下:
(1)由电动汽车向相应配电网络中的低压端TA 发出充电请求信号,进而再由低压端TA 反映给高压端TA。信号中包括了能量需求E需求和预期离开时间T离开。
(2)低压端和高压端的TA 处理充电请求信号后向变压器预定电动汽车的能源需求量,并决定给出符合充电需求信号的最优电动汽车充电功率,将这一过程称为能源预定。
(3)为了同时平抑两个变压器上的负荷,高压端TA 向低压端TA 发出最优电动汽车充电功率反馈信号,低压端TA 计算出经其自己判断的和高压端TA 判断的充电功率的平均值作为最终充电功率。
(4)低压端TA 将允许的充电功率反馈给各个PA,进而PA 可以相应地按照允许的充电功率满足电动汽车的充电需求。
为了保证多智能体系统动态的适应电动汽车实时行为,PA 必须按照固定的时间间隔向TA 发出请求,这样TA 才可以随时确定其能源预定值,否则在预定时间过期后变压器将会删除预定信息。
能源预定不同于二次规划调度方法,这是因为在能源预定中电动汽车的到达时间,即开始充电的时间是未知的。因此,电动汽车只能够预定电能,并在其接入电网的时候蓄电池开始充电。
2.2.2 功率限制器
功率限制器是通过低通滤波器达到平抑电动汽车负荷曲线情况的协调机制,这一机制的优点就是不需要进行预测。也就是说,TA 只需要能够计算出通过变压器的瞬时负载,而PA 也仅需获得电动汽车的瞬时电池状态。在功率限制器协调策略中,PA 发出充电功率需求的过程如下:
(1)由电动汽车向相应配电网络中的低压端TA 发出充电请求信号,进而再由TA 反映给高压端TA。信号中仅包括住宅线路允许的最大功率Pmax。
(2)TA 计算出最坏的负荷,即测量到的住宅负荷和n 个电动汽车提出的充电负荷之和,如式(5)所示。并使用低通滤波器过滤出这一负荷,就可以计算优选负荷,如式(6)所示。
式中:Pw代表不受多智能体系统控制情况下的电动汽车最坏的情景;P优表示低通滤波器控制下的情景。
低通滤波器实质是通过限制变压器上的负荷梯度,来实现削峰填谷的目的。每辆电动汽车的允许负荷如式(7)所示。如果P优≤P住宅,那么系统将会阻止电动汽车充电。

(3)为了在两个变压器上均达到平抑负荷的目的,高压端TA 将优化的电动汽车充电负荷(Pi,hv)信息反馈给低压端TA,然后低压端TA 计算出低压和高压变压器的充电负荷(Pi,hv和Pi,lv)的平均值作为最终充电信息。
(4)低压端TA 将最终充电负荷信息反馈给各个PA,PA 进而开始允许对电动汽车进行充电。
功率限制器协调机制是在未来负荷未知的情景下的可行方案。通过使用低通滤波器限制负荷梯度,可以获得更加平坦的负荷曲线。然而这一方案的缺点就是必须提前确定低通滤波器的截止频率。如果截止频率设定太高,就不能达到削峰的目的,如果定太低,电动汽车就不能充分地进行充电。
3 算例分析
该节以某典型地区为研究对象,2020年为基年,对插电式混合动力汽车入网引起的负荷需求增长问题进行评估和量化。该地区共包括59 250个家庭和10 950 个中小型企业,17 775 辆插电式混合动力汽车。在模拟的情景中,电动汽车依靠电动机和内燃机行驶的时间比例设定为7:3。
为了让由插电式混合动力汽车入网引起的负荷变化更具代表性,选取2020年冬季的某天24小时作为研究对象,这是因为在冬季,由家庭引起的峰荷比其他季节高出40%。
3.1 二次规划调度方法仿真结果
算例使用CPLEX 数学优化算法解决二次规划问题,图4 中显示了对50 辆电动汽车进行优化调度前后对家庭负荷的作用效果。在最优方案中,负荷波动方差达到了最小化。同时,由于考虑了蓄电池的容量限制,这就保证了电动汽车能够依靠电能行驶最大的距离。
但是,鉴于现有技术水平所限,当前或者将来相当长一段时间内,将这种优化方法应用到中央调度程序中尚不可行,具体原因如下:
一方面,信息不完全:虽然该模型能够找到一个优化的解决方案,但是这种解决方案要求得到每一辆电动汽车的真实准确数据。而在现实情况下,这些数据都是无法获取的。比如,我们不可能提前预知一辆电动汽车接入电网的确切时间。
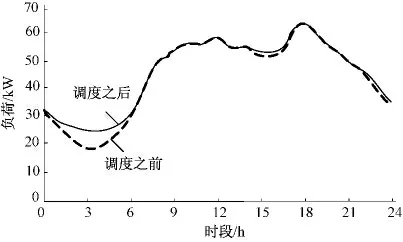
图4 二次规划调度方法的优化结果Fig.4 Optimization results of quadratic programming scheduling method
另一方面,扩展性不够:尽管这种二次规划问题属于凸规划,是可解的,但是由于变量数量太多,算法执行时间太长。在普通计算机上,对50辆电动汽车进行优化调度的程序执行时间长达几个小时。如果增加电动汽车的数目,执行时间将会类似于呈指数增长。
3.2 多智能体系统仿真结果
对多智能体系统方案的评估遵循如下原则:
(1)最优化原则——多智能体系统方案相比二次规划方案的优点如何;
(2)适应性原则——多智能体系统方案如何适应变化的情景;
(3)可扩展性原则——多智能体系统如何适应电动汽车数量增加的情况。
下面将对各个原则进行详细的研究。
3.2.1 最优化原则
对两种协调机制进行了仿真分析,高压变压器获得的负荷曲线如图5所示,低压变压器情况类似。与二次规划方案相比,这些曲线的方差指标分别是80%~87%(功率限制器)和95%(能量限制器)。能量限制器协调机制下,汽车行驶时间得到了优化,而对于功率限制器机制来说,电汽车行驶时间取决于低通滤波器的截止频率(仿真频率下负荷方差为62%~67%,并没有达到优化的70%)。如果赋予较低电池能量的电动汽车一个更高的优先级,指标水平就能够得到改进。
3.2.2 适应性原则
与中央调度程序相比,多智能体系统方案不需要确切的数据支撑。这是因为PA 能够以固定的频率发出充电需求信号,TA 可以动态的校正预期负荷水平信息。例如,如果电动汽车离开,PA就不再发出需求信号,而TA 也会删除未实现的能源预定信息。

图5 不同协调机制策略下的负荷曲线对比( 变压器为400 kVA)Fig.5 Load curve comparison under different coordination mechanisms
多智能体系统方案的适应性体现在PA 的需求信号被TA 处理的比率。如果PA 第一次发出请求,TA 就必须将其纳入重新调度计划,而如果电动汽车发出的需求信号与之前的相同,TA 就不需要对其进行处理。
在负荷高峰期(傍晚18:00),会有1 000 辆电动汽车在5 min 之内接入电网(图6)。仿真结果表明,能量限制器协调机制下系统能够在5 min 内处理1 371 个需求信号,而功率限制器每分钟能够处理大约3 200 万个需求信号。两种协调机制都能够实现快速响应以保证系统的适应性。

图6 电动汽车数量变化趋势图Fig.6 Change chart of electric vehicles number
3.2.3 可扩展性原则
随着电动汽车数量的增长,能量限制器和中央调度程序的执行时间也随之增长(图7)。可以看出能量限制器的执行时间函数比中央调度程序更加接近于线性曲线,也就是说能量限制器具有更好的可扩展性。功率限制器的适应性不具有相关性,这是因为功率限制器在处理请求信号的速度极快。

图7 电动汽车数量与执行时间关系示意图Fig.7 Relationship between electric vehicles number and execution time
4 结论
为了解决插电式混合动力汽车入网所引起负荷变化问题,提出了两种调度方法:基于中央调度程序的二次规划调度方法和基于能量限制器和功率限制器的多智能体系统调度方法,并在算例中对二者进行对比分析,仿真结果表明当插电式混合动力汽车处于充分充电状态时,二次规划调度能够很好的平抑高峰负荷。然而,由于其信息不完全和扩展性不够等缺点,该方法在实际中是不可行的;而多智能体系统方法能够克服这些弱点,对于不完全的、不可预测的信息具有适应性和扩展性,同时能够达到降低峰荷。与最优二次规划调度相比,效率可达到95%。从最优性、适应性和可扩展性三个方面说明多智能体调度方法优于二次规划调度方法。
本文对比研究了不同插电式混合动力汽车的需求侧管理解决方案,今后还能够在以下方面推进相关研究工作:第一、在农村配电网等更多的实际情景中对不同的调度方法进行模拟分析;第二,研究其他先进的调度方法技术,如基于遗传算法的调度程序和随机调度程序等;第三,对所构建的多智能体调度系统进行优化,增加其可扩展性。
[1]Galus M D,Zima M,Andersson G.On integration of plug-in hybrid electric vehicles into existing power system structures[J].Energy Policy,2010,38 (11):6736-6745.
[2]吴春阳,黎灿兵,杜力,等.电动汽车充电设施规划方法[J].电力系统自动化,2010,34 (24):36-39,45.
[3]高赐威,董传燕,薛飞.基于多代理系统的电动汽车充电行为仿真软件设计与实现[J].中国电机工程学报,2012,32 (31):68-77,S9.
[4]徐国钧,刘永胜,李题印,等.基于层次分析和概率模拟的电动汽车对配网负荷影响研究[J].电力系统保护与控制,2012,(22):38-45.
[5]陈彬,王业磊,许昭,等.计及电动汽车充电调度可行域的电力系统机组最优组合[J].华北电力大学学报,2014,41 (1):38-44.
[6]曾鸣,薛松,刘宏志,等.我国区域电动汽车运营模式及其最优并网规模规划模型[J].电网技术,2012,36 (6):175-181.
[7]Wu D,Aliprantis D C,Gkritza K.Electric energy and power consumption by light-duty plug-in electric vehicles[J].IEEE Transactions on Power Systems,2011,26 (2):738-746.
[8]Darabi Z,Ferdowsi M.Aggregated impact of plug-in hybrid electric vehicles on electricity demand profile[J].IEEE Transactions on Sustainable Energy,2011,2 (4):501-508.
[9]Qian K J,Zhou C K,Allan M,et al.Modeling of load demand due to EV battery charging in distribution systems[J].IEEE Transactions on Power Systems,2011,26 (2):802-810.
[10]Clement-Nyns K,Haesen E,Driesen J.The impact of charging plug-in hybrid electric vehicles on a residential distribution grid[J].IEEE Transactions on Power Systems,2010,25 (1):371-380.
猜你喜欢
水力发电(2022年11期)2022-12-08
汽车维修与保养(2021年8期)2021-02-16
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
中国特种设备安全(2019年11期)2020-01-16
动漫星空(兴趣百科)(2019年3期)2019-03-07
通信电源技术(2018年3期)2018-06-26
北京航空航天大学学报(2017年4期)2017-11-23
海外星云(2016年17期)2016-12-01
现代工业经济和信息化(2016年4期)2016-05-17
通信电源技术(2016年3期)2016-03-26