大型反铲挖泥船集成监控系统研制与应用
2015-12-18 11:20:00罗刚冯志勇陈定王璇
中国港湾建设 2015年1期
罗刚,冯志勇,陈定,王璇
(中交天津港航勘察设计研究院有限公司,天津 300457)
0 引言
相对传统的绞吸、耙吸和抓斗挖泥船而言,反铲挖泥船是近年来出现的一种新的疏浚船型。中交天津航道局所属“津泰”船是引进荷兰技术,在国内建造的1艘反铲挖泥船,其主要疏浚设备为位于船尾部的1台反铲式挖掘机。船舶施工时,由3根钢桩将船体由自由浮态向上抬升一定高度,使船体处于半浮状态,然后升降3根钢桩的高度,使船体处于水平状态。位于船首的钢桩台车用于船舶的掘进行走。船舶的近距离航行,由位于船尾的2台全回转舵桨提供推进动力。反铲式挖掘机、全回转舵桨由液压驱动。钢桩的升降、台车的行走分别由液压绞车驱动。液压动力源为位于机舱的2台液压泵站,每台泵站分别由1台柴油机和液压油泵组成。全船电站由2台柴油发电机组提供电力,必要时2台柴油发电机组可实现并车运行。
“津泰”船近期成功进行了集成监控系统的国产化设计改装,该系统用于全船主要设备和施工过程的监控。系统主要包括:疏浚监测与控制、机舱监测报警[1]等功能。
1 系统主要功能设计
反铲挖泥船集成监控系统主要包含以下几项功能。
1.1 疏浚信息系统
疏浚信息系统[2]主要用于实现船舶施工过程的各种数据信息的集中管理。能够对安装在船上的各传感器的信号进行处理并存储;能够进行船体及其各部分位置方向的计算并形成模型进行显示,实时计算挖泥船和船体各个部分的位置和方向,通过俯视和侧视图将船舶及施工地形模型呈现给用户。
具体主要包含以下功能:数据文件管理、疏浚断面、疏浚轨迹及抛泥轨迹显示、船舶及施工地形的实时三维显示、施工过程历史回放、远程数据传输、传感器参数设置及其他可视化画面显示等。
1.2 反铲挖掘机系统监控
反铲挖掘机由操作室、旋转机构、大臂、小臂和铲斗构成,是疏浚施工的核心设备。
反铲机操作室设有反铲机操作手柄(控制旋转机构、大臂、小臂和铲斗)、控制箱(控制钢桩、台车及其它辅助设备)、监控计算机等监控设备。
反铲机室装有1个倾角传感器,用于测量反铲机的横倾和纵倾角度,其角度值在反铲机室和驾驶室设备监视计算机屏幕显示。
反铲机的旋转驱动机构由5个液压马达驱动。旋转机构由2个编码器来测量反铲机旋转的角度,在反铲机室和驾驶室计算机显示屏可以显示其角度值。
反铲机大臂、小臂和铲斗的动作分别由2个液压油缸驱动。大臂、小臂和铲斗之间的连接轴上分别设有1个角度传感器,用于测量大臂、小臂和铲斗与旋转机构之间的相对角度。计算机软件画面实时显示旋转机构、大臂、小臂和铲斗的姿态和角度。
1.3 台车及钢桩系统监控
台车由1台绞车牵引实现在轨道上的往复行走,设有台车最小行走距离和最大行走距离限位。当台车行走距离到达最小行走距离和最大行走距离时,台车绞车应停止动作,同时现场控制箱、反铲机室控制箱和驾驶室液压设备操作台相应报警指示灯亮,蜂鸣器发出报警声响,反铲机操作室和驾驶室设备监视计算机显示屏显示报警信息。台车的行走距离由长度传感器进行测量,能够在反铲机操作室和驾驶室液压设备操作台设备监视计算机显示屏上连续显示台车的行程。
全船设有3根钢桩,分别位于船尾左、右舷和船首台车上。艉左、右钢桩为固定桩,艏钢桩为行走钢桩。每根钢桩设有上限位和下限位,当钢桩向上运动到上限位时,钢桩绞车必须停止起升动作,当钢桩向下运动到下限位时,钢桩绞车必须停止下降动作。当钢桩到达上下限位时,现场控制箱、反铲机操作室控制箱和驾驶室液压设备操作台报警指示灯亮,蜂鸣器发出报警声响,同时反铲机操作室和驾驶室设备监视计算机显示屏发出报警信息。每根钢桩的起升钢丝绳设有拉力传感器,用于监测船舶半浮状态时钢丝绳所承受的拉力。拉力传感器安装于钢桩起升滑轮轴上,当钢丝绳的拉力超出设定值时,在驾驶室液压设备操作台计算机和反铲机操作室计算机上输出报警信息,蜂鸣器发出报警声响。
绞车安装绝对值编码器,用于测量钢丝绳收放长度。绞车还可在反铲机操作室和驾驶室液压操作台进行控制。绞车启动和停止时,转动速度是通过PLC控制自动地按照设定的斜坡时间斜线上升和下降,以减少绞车动作对系统产生的冲击作用。
1.4 船体吃水调节
当船舶准备开始施工时和处于施工过程中,船舶吃水可以通过钢桩的升降进行调节,使挖泥船保持在要求的设定吃水值。系统首先通过吃水传感器测量实际吃水,并通过横倾和纵倾传感器值计算每个钢桩的吃水。通过对比实际吃水深度与设定吃水深度值,当实际吃水过小时,系统输出控制指令控制钢桩绞车带动钢桩上升来增大实际吃水值;当实际吃水过大时,系统输出控制指令控制钢桩绞车带动钢桩下降来减小实际吃水值。当船舶进行吃水调节时,反铲机应停止挖掘作业,待船舶吃水调节完成后方可进行挖掘作业。在船舶吃水调节过程中,当任何一个钢丝绳拉力值超过限制值时,系统给出相应报警信息并限制使钢丝绳拉力进一步增大的操作。
1.5 其它辅助设备监控
其他辅助设备的监控也是系统不可缺少的内容。例如:液压柴油机运行参数的监测和应急停止控制、发电柴油机组及配电板运行参数的监测、油脂润滑系统的监控、海淡水冷却系统的遥控、主要液舱液位遥测以及辅助设备的遥控启动或停止等。
2 技术实现
2.1 计算机网络
计算机系统有2台互为热备用的服务器,位于驾驶室,其中1台负责船舶施工数据的无线远程传输。在驾驶台,设有推进器控制台和液压设备控制台。推进器控制台用于操作液压舵桨,控制船舶航行。在推进器控制台上设有2台操作计算机,1台用于显示船舶航行轨迹及海图,1台用于监控船舶设备。液压设备控制台用于操作钢桩、台车及倒桩液压设备。在液压设备控制台上设有1台触摸屏计算机,用于设备参数设定、设备的操作及状态监测。液压驾驶室海图桌,设有1台办公用计算机,用于日常办公。在餐厅、发电机间、船长、轮机长、大副、大管轮房间将增加计算机接口,连接控制系统网络,用于施工监测。
置于驾驶室的潮位仪、电罗经、DGPS等设备通过串口网关连接到驾驶交换机JH2。
在反铲机操作室设有4台计算机,其中2台计算机的显示器并列安装于设备支架上,用于监视反铲机的姿态及船舶施工定位显示,其中1台位于反铲机操作室内右前方的支架上,为触摸屏计算机,用于监视船舶设备状态。
计算机网络图如图1。

图1 计算机网络结构图Fig.1 The computer network structure
2.2 PLC网络
全船设备的监测和控制分别由2个PLC系统(PLC1和PLC2) 完成。PLC2主要用于管理液压系统,如电磁阀通断等;PLC1主要用于管理液压系统之外的所有监控点,如疏浚信息、船舶状态、机舱监控与报警等。PLC1和PLC2之间通过1个DP/DP coupler连接,经过PROFIBUS总线实现相互通讯。整个PLC系统通过PLC1的网络接口模块CP343-1实现与计算机网络系统的数据交换。PLC系统的数据交换流向如图2。
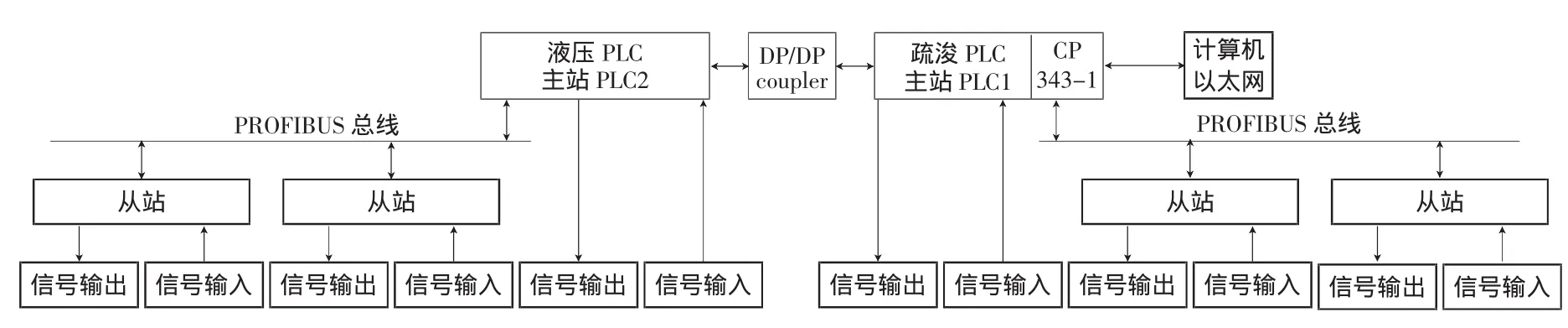
图2 数据交换流向图Fig.2 The data exchange flow-direction
2.3 软件实现
集成监控系统上位机软件采用VC++进行程序开发[3],上位机软件的主要作用是实现操作人员和集成监控系统的人机交互,集成监控系统将全船所监控设备的信息显示给操作人员,操作人员能够将操作指令下达给集成监控系统,从而实现集成监控系统所具有的全部功能。上位机软件监控画面采用图元组态[4]的形式实现,便于软件监控画面根据实际需要进行编辑修改。上位机软件分为服务器软件和操作站客户端软件,客户端和服务器之间采用C/S结构模式。考虑到程序的调试、使用和维护方便,将服务器和客户端的功能集中到同一个软件中,在实际使用中,根据服务器和客户端IP地址的不同来确定是否使软件充当服务器或客户端的功能。两台服务器中的任意一台程序除完成历史数据记录外,都可以将船舶施工数据通过无线网络传送给岸基信息管理中心。软件的主要监控画面内容如下:
1)疏浚信息显示画面(海图编辑、海图背景及船舶定位显示、水深信息显示等);
2)反铲机姿态(侧视图、俯视图、液压机构参数等);
3)台车及钢桩系统(显示台车行程、绞车及钢桩状态等);
4)液压泵站及液压系统(电磁阀状态、模拟量/开关量传感器数值等);
5)液压柴油机(运行参数、报警信息);
6)发电柴油机组(柴油机运行参数、报警信息;电站电压、电流、功率等);
7)油脂润滑系统(阀门开/关、模拟量/开关量传感器数值);
8)机舱报警(显示全船所有的报警信息,如液舱液位等);
9)传感器的参数设置(设置传感器的增益、初值等)。
下位机采用西门子的SIMATIC S7-300系列PLC,采用step7编写逻辑控制程序,负责实现监控系统的底层逻辑控制和数据采集功能。PLC网络和计算机网络通过MODBUS TCP实现相互通信[5]。
3 实船应用
该系统已经成功安装到“津泰”大型反铲挖泥船上,该反铲挖泥船是国内目前最大的反铲挖泥船。改装后该船已在国内进行正常的挖泥施工,实际工作证明该系统运行稳定,各项功能均能满足实际疏浚施工要求。
4 结语
反铲挖泥船集成监控系统是国内首套专门为反铲挖泥船疏浚施工而开发研制,并且成功应用于大型反铲挖泥船的集成监控系统。该系统采用上下两层网络结构,综合了计算机软件技术和自动控制技术,较好地实现了反铲挖泥船疏浚信息管理、设备监控、监测报警以及数据存储与远程传输等各种功能,为挖泥船施工生产提供了很好的操作管理平台,能够更好地发挥船舶的生产效率,更加方便船舶的操作管理,提高了船舶施工的安全性。
[1] 万曼影,盛伟瑜.全数字式机舱监测报警系统[J].中国造船,2002,43(2):90-94.WANMan-ying,SHENGWei-yu.All-difital engine room monitor&alarmsystem[J].Shipbuildingof China,2002,43(2):90-94.
[2] 罗刚,李鹏超,于涛.大型复合驱动耙吸挖泥船集成监控系统设计与实现[J].中国港湾建设,2013(5):34-36.LUOGang,LIPeng-chao,YUTao.Design and realization of integrated monitoringand controllingsystemfor largecompound-driven hopper-dredger[J].China Harbour Engineering,2013(5):34-36.
[3]KRUGLINSKI DAVID J,WINGO SCOT,SHEPHERD GEORGE.Programming Visual C++6.0技术内幕[M].希望图书创作室,译.北京:北京希望电子出版社,1999.KRUGLINSKI DAVID J,WINGO SCOT,SHEPHERD GEORGE.Programming Visual C++6.0 technology[M].Hope Book Studio,translated.Beijing:Beijing Hope Electronic Press,1999.
[4] 王亚民,陈青,刘畅生,等.组态软件设计与开发[M].西安:西安电子科技大学出版社,2003.WANGYa-min,CHENQing,LIUChang-sheng,et al.Design and development of configuration software[M].Xi′an:Xidian University Press,2003.
[5]SWALESA.Open Modbus/TCPspecification[K].Schneider Electric,1999.
猜你喜欢
石油和化工设备(2022年3期)2022-07-13 05:54:00
中国水运(2020年7期)2020-11-06 05:53:05
金属加工(热加工)(2020年12期)2020-02-06 05:59:04
石油工程建设(2017年4期)2017-09-03 11:03:58
工业设计(2016年7期)2016-05-04 04:02:05
设备管理与维修(2016年5期)2016-03-16 02:20:48
船海工程(2015年4期)2016-01-05 15:53:50
同煤科技(2015年4期)2015-08-21 12:51:04
广东造船(2015年6期)2015-02-27 10:52:45
河南科技(2014年24期)2014-02-27 14:19:41