四自由度参赛机器人机械手设计研究
2015-12-17 07:13:18王秀
现代制造技术与装备 2015年6期
王 秀
(太原理工大学 机械工程学院,太原 030024)
四自由度参赛机器人机械手设计研究
王 秀
(太原理工大学 机械工程学院,太原 030024)
机器人技术是高科技领域内一项十分重要的技术,它在工业企业中被广泛应用。本文主要就四自由度串联型机械手进行相应研究,使机械手得以稳定运行,迅速完成了这一任务,为日后的机器人之机械手设计提供理论具备一定参考意义的借鉴资料,促进其日后的研究发展。
四自由度 机械手 参赛机器人
1 机械手的发展历程和应用现状
一个完整的工业机器人主要分为三部分:检验组件、机械性组件及控制性组件。其中,检验组件包含感知体系及环境和相关机器人的交错体系;控制体系由控制性体系及人机交错共同构成;而机械性组件一般包含驱动体系与详细的机械框架体系的机械性组件。本文以代币的搬运及抓取为基本对象,分析机械手在体系中的运用,明确机器手的目标要求及主要技术指标,实现机器手的整体设计。
2 机械手机构模型
2.1 机械手主要部件的结构设计
机械手是机器人的主要活动部件,机械手的灵活性对机器人的整体性能有很大影响。其主要部件包括手臂、手腕、手爪、驱动单元等,通过机械手来进行各项操作,机械手和操作臂相连接,后者主要通过几个关节进相连接并实现相应的运动目的。
本比赛用设计的机器人设置有两个机械手,主要用于夹持代币和篮筐,这两个机械手的其他部件的区别在于手爪部分需要抓持的东西不同而尺寸稍有不同,因而在研究时,只选择其中之一即可。本文在研究时选择了夹持代币的手进行研究,另一个机械手和这个基本保持一致,以下将对机械手的各组成部分进行具体研究。
2.2 驱动方案的选择
2.2.1 驱动方式种类
2.2.1.1 液压驱动系统
优点:此种类型的驱动系统在运动过程中可以保持较高的传动平稳性,且自纵较小,能承载的力度较大,传动和驱动装置可靠性较高,且可以进行无级调速,也能实现一些复杂的运动。
缺点:其不利之处主要是对加工制造精度要求较高,传动比受到的影响较大,不能精确控制,受温度影响较大,不易实现远距离运输。此外,其中的液压油易被污染,从而对机构性能产生影响。
2.2.1.2 气动驱动系统
优点:气动驱动装置的安全性较高,其对温度和振动的影响不敏感,可以保持长时间连续工作。其功率变化幅度较大,可以在很宽幅度内进行调节,可以从几百瓦,直接调节到几万瓦,且运动元件的转速也可以设计到达很高数值,在负载情况下也能直接启动。
缺点:气压输送转化的效率较低且受气压波动影响较大,不易保持稳定性,且在工作过程中会产生较大噪音和振动。
2.2.1.3 电气驱动系统
优点:这种驱动方式容易控制传动比因,且运动精确度高,调速很容易实现,运动也比较平稳,不会受较大影响,但输出推力较小。
缺点:难以输出较大推力,需要设置一些辅助运动装置,且成本相对较高。
2.2.2 手部关节传动方案的选择
根据本比赛的规则,用时是唯一的比赛结果评价标准,所以应尽量使手臂在工作时需要的时间尽可能少,代币抓取所需时间一般较长。根据上述要求,应确保手爪的反应速度和夹持速度达到较高要求,根据以上对驱动装置的对比可以看出在这种情况下,最合适的驱动装置为气动驱动式。
2.3 机械手参数确定
在设计机械手参数时,需要考虑代币架代币尺寸及篮筐尺寸,综合考虑后设计抓取代币和篮筐的机械手在竖直方向上的运动范围分别为750~1050mm和400~800mm。据此可以设计出手臂竖直导轨长700mm。在选择手臂水平导轨长度时,考虑到手臂的运动特点和实际设计经验,而设计其长度为800mm,以使抓取物品的效率明显提高。同时设计出代币手爪与手臂长度均为300mm,两方位导轨间距100mm。
2.4 气缸的选定
由于手臂和腰部都选择气动驱动方式,因而需要同时选择合适的气缸以便为驱动元件提供动力。气动驱动由于具有结构简单、紧凑、可靠性高等特点,且使用维修也较为方便,因而本设计中驱动装置动力单元都选择气缸。此外,选择气缸驱动还可以降低成本,提高工作效率,在一定程度上增加了获胜几率。
2.4.1 机械手部分气缸的设计
2.4.1.1 气缸类型及安装方式的选取
选择气缸类型时,主要考虑工作要求,根据其运动特点而选择双作用气缸,同时考虑到成本因素,最终选择普通气缸,并在考虑其安装方式条件下,选择了如图1所见的气缸。

图1 双作用气缸
2.4.1.2 气缸直径的确定
分析图1中的气缸,当活塞向左运动时产生的推力为式(1),向右运动时产生的拉力为式(2)。

式中,F1为活塞杆的推力;F2为活塞杆的拉力;D为活塞直径;D为活塞杆直径;p为气缸工作压力;FZ为气缸工作时的总阻力。
气缸在工作时,受到的总阻力FZ主要与缸内的摩擦力有关,此外惯性力也对其有一定影响,可以将上式进行简化。所得结果如下:

式中,η—载荷率。
在确定载荷率主要考虑如下因素:第一,若气缸运动要求较高且频率较大,则对应的载荷率η可以选取0.3~0.5,速度与频率应保持负相关;第二,若要求并不高,运动情况较简单,匀速,这种情况下可以选取载荷率η= 0.7~0.85。
根据公式(3)和(4)可得直径公式,当推力做功时:

当拉力做功时:

通过公式(6)在计算直径时,可通过气缸拉力对活塞杆直径d进行估算,可以参考估算公式d/D=0.16~0.4。将其变换得到式(7):

本文设计的机械手需要夹持的代币重170g,将其夹持状况化简所得示意图见图2。

图2 手爪夹持简图

在进行计算时,将摩擦因子设为0.25,通过估算并估计其实际运动时振动情况,据此估判断出输出推力F1=20N时,可以达到运动所需要求,取η=0.8,p=0.4MPa,代入直径求解公式可以得到D=8.92mm。将此数值和下表1对比,并取整得D=10mm。

表1 气缸内径尺寸系列(mm)
2.4.1.3 活塞杆的计算
进行活塞杆计算时,如果其长度和直径比小于10,则可以根据强度要求确定活塞杆直径d。本文设计的机械手由于并不需要很长的行程,因而满足L≦10d。这一条件可以得到公式(9):

其中,F1为气缸的推力;σP为活塞杆材料的许用应力,σP=Rm/S;Rm为材料的抗拉强度;S为安全系数,S≥1.4。
为了达到综合性能要求,一般选择45号钢作为活塞杆材料,此种钢材的强度足以满足要求,由于机械手并不会产生激烈的运动,因而S取6。计算可知d≥0.505mm。将此结果和表2进行对比并圆整得到d=4mm。
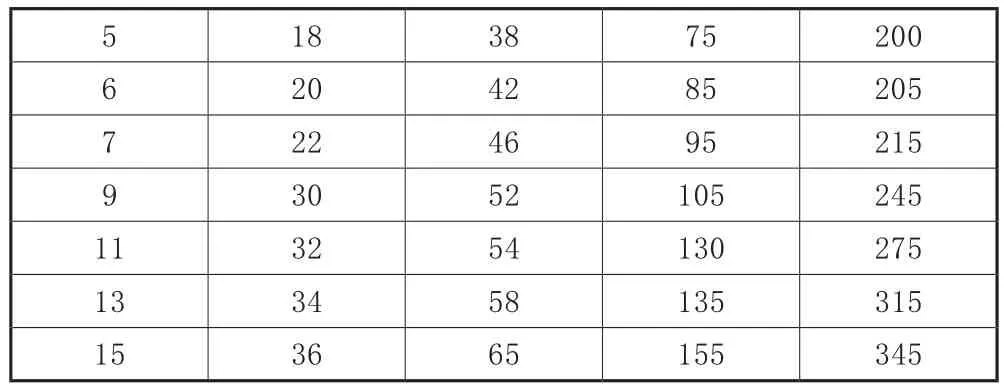
表2 气缸活塞杆直径系列(mm)
2.4.1.4 钢筒壁厚的计算
气缸在工作时,会受到较大的压力,因而应确保其厚度满足要求,以免在力的作用下产生变形。通常情况下钢筒应满足δ/D≤1/10,可通过式(10)计算:

式中:δ为气缸筒的壁厚;D为气缸筒内径;Pt为气缸试验压力,通常取Pt=1.5P[σ]为钢筒材料许用应力,[σ]=Rm/S;Rm为材料抗拉强度;S为安全系数,一般取S=6~8。
本文设计时,考虑到气缸工作压力而选择材料为HT150钢,其[σ]=30MPa,将其代入式(10)求出δ=0.06mm,由于实际计算出的此壁厚值都很小,难以加工且不方便安装缸盖,因而实际取值都在原计算结果上适当增加一些。根据表3对δ取整得δ=7mm。
对照表4中气缸参数选择恰当的气缸。
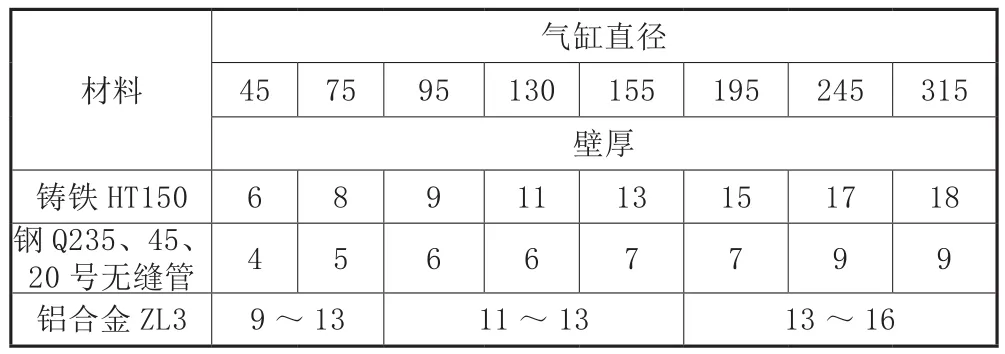
表3 气缸筒壁厚

表4 气缸产品规格
QGX系列气缸尺寸较小,但其性能较好,经过多年的持续改进,其各方面性能和质量都有了较大程度的提高,且产品种类也明显增多,可供选择范围也增加,且其通用性较强,便于更换零件。QGX型气缸的主要性能参数见表5。
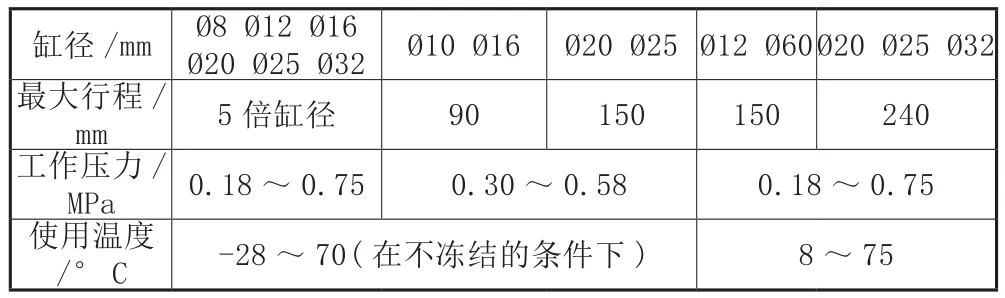
表5 QGX系列小型气缸技术规格
对比以上两表,并进行综合分析,最终选择气缸型号为此系列中的10mm直径型号。
以上即使本设计中的机械手对应的气缸设计过程,两只机械手的工作条件基本一致,因而其对应的气缸分析过程计也基本相同,只是夹持力度有大小之分,本设计选择的气缸材料都是一样的,已知m=2.85kg,可取F1=80N,把该数值代入直径公式中,并计算出D=17.84MM,Dd>1.01 mm,取整D=20mm,d=5mm,D=20mm,d=5mm,壁厚δ=0.25mm,标准化后取δ=7mm,因此,按照上面的结果选取相应的气缸型号为QGX 中20mm 直径系列。
2.4.2 腕部气缸的设计
因为所有气缸材质完全相同,分析以上气缸选择过程可以得到主要决定因素是F1,即F1可以确定出气缸型号。
就腕部关节的气缸推力F 估算为100N,代到上面的式子中,求出D=19.95mm,d>1.13mm,取整处理D=20mm,d>5mm,壁厚标准化后取δ=7mm,据此结果不难发现,此气缸和手爪处的气缸相同,同为此系列20mm直径的。
2.4.3 手臂部分的气缸设计
根据上述计算,可知手臂水平和垂直导轨受到的F1分别为150N、160N,二者数值相差很小,驱动要求也接近,因而可以选择同样的气缸,取其中较大者即160N来分析计算。
将此数值代入公式(5),计算得D=25.23mm,在设计时,为了计算和安装方便,一般在满足条件下对计算出的数值进行取整处理,因而对其取整为32mm,以下各数值都取整;利用式(8)求得d>2.61mm,取整为3.6mm;利用式(9)计算出壁厚:δ=0.32mm,取整为δ=7mm。根据这些参数,并对比表4与表5,选择出气缸类型为QGX,直径为32mm。
3 结语
本文在前人研究的基础上,对机器人的手部分和气缸在设计时需要依据的原则进行简要介绍,然后进行具体设计,先通过运动条件分析计算相关部件的参数,据此对手臂手腕等进行设计,并选择出机械手的结构形式;最后对气缸的使用和维护要求进行具体论述。希望本文的研究能对机械手的研究起到一定的帮助作用。
[1]李航,宋春华,罗胜彬,等.机器人的研究现状及其发展趋势[J].微特电机,2013,(4):49-51.
[2]徐方.工业机器人产业现状与发展[J].机器人技术与应用,2007,(5):2-4.
[3]伍锡如.工业机器人的研究现状及趋势[J].科学论坛,2012,(38):423.
[4]梁喜凤.番茄收获机械手机构分析与优化设计[D].杭州:浙江大学,2004.
[5]王鸿鹏,杨云,刘景泰.高速移动机器人的研究现状与发展趋势[J].专题研究,2011,(12):1-4.
Design and Research of Robot Manipulator with Four Degrees of Freedom
WANG Xiu
(Mechanical design and theory of mechanical engineering college, Taiyuan University of Technology, Taiyuan 030024)
Robot technology is a very important technology in the field of high technology, it is widely use d in industrial enterprises. In this paper, a s eries of four degree of freedom mechanical hand for the corresponding research, so that the manipulator can be s table operation, rapid completion of the task, f or future robot manipulator design to provide a theoretical reference, to promote its future research and development.
four degree of freedom, manipulator, robot
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
沈阳理工大学学报(2022年3期)2022-08-11 01:59:46
中财法律评论(2019年0期)2019-05-21 02:56:40
世界知识(2017年18期)2017-12-28 22:00:38
人民周刊(2017年17期)2017-10-23 09:06:00
现代企业(2017年9期)2017-09-21 10:50:52
流体机械(2017年9期)2017-02-06 05:13:58
通信电源技术(2016年1期)2016-04-16 04:57:29
机电信息(2015年3期)2015-02-27 15:54:53
中国新技术新产品(2014年21期)2014-03-28 02:28:37