认知科学对人工科学的引领趋势
2015-12-16 08:14:06张寅生
学术界 2015年12期
○张寅生
(中国科学技术信息研究所 信息技术支持中心,北京 100038)
一、人工科学和认知科学的基本概念和学科发展概况
“人工科学”是司马贺(Herbert A.Simon)于20世纪60年代提出的。这一概念指谓“人工的科学”,即人工物和人工行为相关的科学。他纳入这一科学领域的典型学科是计算机科学、设计科学、心理学、认知科学、艺术学、管理学、经济学等这些以人自身或人干预的对象为研究对象的学科。
近年来,包括人工科学的科学技术发展呈现出很多革命性的变化,这些变化很多是司马贺所预测的,有些则具有新的特征,其中一个进化模式上的特征是认知科学对人工科学的影响。
自美国于1979年成立认知科学协会(Cognitive Science Society)以来,认知科学被认为作为一门独立学科正式诞生。2000年,美国国家科学基金会和美国商务部资助的一个研究项目对美国新世纪优先研究与发展的领域进行了研究与建议,确定了一个战略性的方向,即着眼提高人类能力的聚合科技,其核心学科被选择为纳米、生物、信息、认知(Nanotechnology,Biotechnology,Information Technology,Cognitive Science:NBIC)四个学科,在世界科技领域大大提高了认知科学在科技领域的引领作用。该研究成果集中体现在《NBIC报告》之中,报告称:〔1〕
在下个世纪,或者在大约5代人的时期之内,一些突破会出现在纳米技术、生物技术(消融了自然和人造的分子系统之间的界限)、信息科学(导向更加自主的、智能的机器)、生物科学和生命科学(通过基因和蛋白质学来延长人类生命)、认知和神经科学(创造出人工神经网络并破译人类认知)和社会科学(理解文化媒母,驾驭集体智商)领域,这些突破被用于加速技术进步的步伐,并可能会再一次改变我们的物种,其深远意义可能媲美数十万年以前人类首次学会口头语言。NBICS(纳米-生物-信息-认知-社会)的技术综合可能会成为人类伟大变革的推进器。
这个报告将认知科学等四学科带来的科技融合与人类进化史上的言语产生、制造工具、计算机发明等里程碑事件相提并论,足见其对认知科学引领作用的认可。
在我国,认知科学尚没有列入教育部等多个科学管理组织的学科目录,但是已经成立了认知科学学会,认知专业研究机构也有增加趋势,并有多个专业的认知会议举办。如清华大学心理与认知科学研究中心主办的全国认知科学会议截止至2015年已经举办了七届。
认知科学对于人工科学的影响也越来越引起重视。已经有著作专门研究认知与人工科学的关系,如Jeff Johnson的《认知与设计》〔2〕。在我国设计界也提出了“设计学的基础科学是认知科学”〔3〕的结论。
二、当前认知科学对人工科学引领领域和成果
从近期的人工科学现状和趋势分析,以下人工科学领域,特别是创新设计领域,突出体现了认知科学的引领作用,特别体现了认知科学的直接研究成果和研究方法特征。
1.人体及其功能特征识别技术、生命体征和健康状态模式识别技术。已经识别的人体及其功能特征包括:指纹、虹膜、人脸、语音、DNA等等,其基本方法包括傅立叶分析等滤波技术、概率计算方法、机器学习方法。此外,在设备医学诊断中也有大量的模式识别技术应用。与此相关的技术是生命体征和健康(疾病)状态模式识别技术。这些技术原理需要考虑复杂而模糊的生命状态识别模式,同时还需考虑多因素的因果性和大量的随机性,其识别原理与单项的人体器官和单独功能特征识别有别。通过推理诊断简单模式的诊断在人工智能早期的疾病诊断系统已有应用,如专家诊断系统:诊断血液中细菌的感染MYCIN,血液凝结系统诊断CLOT;此外还有通过知识库机器规则推理实现特征推导。近期的技术如Tripath〔4〕和Cytyc〔5〕公司的细胞和癌症检测识别技术,通过成像识别模式特征。在健康和卫生数据中的生物和行为模式的数据分析将人体分析即模式识别技术扩大到了多模态数据和生命体多功能数据,称为当前大数据分析方法新兴的领域之一。
人体及其功能特征识别、生命体征和健康状态模式识别,大致上是人自身非意识主导的生命体征模式;对它们的认知(cognition,也就是识别)是人的涉身认知能力、自我认知能力的模拟、延伸和技术化。
2.脑机接口技术,包括脑-机接口、机-脑接口、脑-脑接口技术。上述交互方式都已经实现,其识别和控制程度及复杂度差异很大。脑-机接口是通过传感器获取脑信号进行模式识别;机-脑接口将机器信号直接传递给大脑或大脑信号,以期由机器模拟意念驱动脑神经或意识,达到行使意念控制的效果;脑-脑接口将脑信号获取后经过编码传输、解码作用于另外的大脑进行脑信号之间的直接作用。
脑信号的主要类别是脑电波和功能核磁共振读取的脑血氧图。当前功能核磁共振可扫描的大脑立体像素可达10万个。此外,脑神经已经能够真实成像,图1是Van J.Wedeen小组拍摄的脑神经3D图像。〔6〕
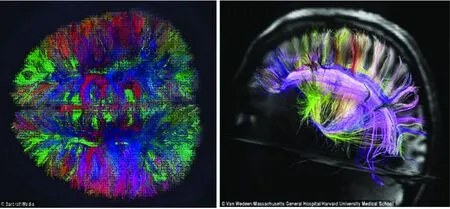
图1 脑神经3D图像
对实体—脑的直接映射关系的fMRI成像研究获得了很大进展。已经能够实现通过视物的fMRI脑信号还原被视物。
对于具有语义学独立特征的物体的fMRI脑信号模式也已经被解读。这种方法将脑信号的不同特征设置为特征空间进行机器学习从而识别脑信号的特征模式及其行为相关性,即多维个体系分析方法(multi-voxel pattern analysis,MVPA)。〔7〕
机脑接口的成功实验是用认为设置的波形控制动物脑神经并驱动肢体,相当于“创造意识”。美国匹兹堡大学的安德鲁·施瓦茨博士等人对两只短尾猴进行了“意念”操纵机械臂抓取食物的实验,他们在猴子脑部运动神经皮层植入100个微小电极。电极彼此形成网络,每个电极与一个神经细胞连接,这些电极还通过计算机与机械臂相连。当脑细胞发出某种活动指令时,电极会将接收到的信号经计算机处理后传送给三维机械臂,指挥其完成抓取放在面前的葡萄等食物的任务。其成功率分别为61%和78%。〔8〕
对于任务的脑fMRI脑信号的解读的重要进展还包括加州大学洛杉矶分校通过脑核磁共振能够识别8种任务,如读词、说出是否押韵的配对词,查音调的数量对特定目标按钮,决定如何花钱买东西。〔9〕
脑在进行逻辑运算的fMRI脑信号的实验也进行了一些。〔10〕
脑脑通信最近的实验进展是身在印度的实验者用脑电波对位于法国的人说出了“hola”和“ciao”(西班牙语和意大利语“你好”),对方通过脑电波理解了这个问候。脑电波在远程传输时经过了编码和解码。这个实验完成了“心灵感应”的过程。见图2。
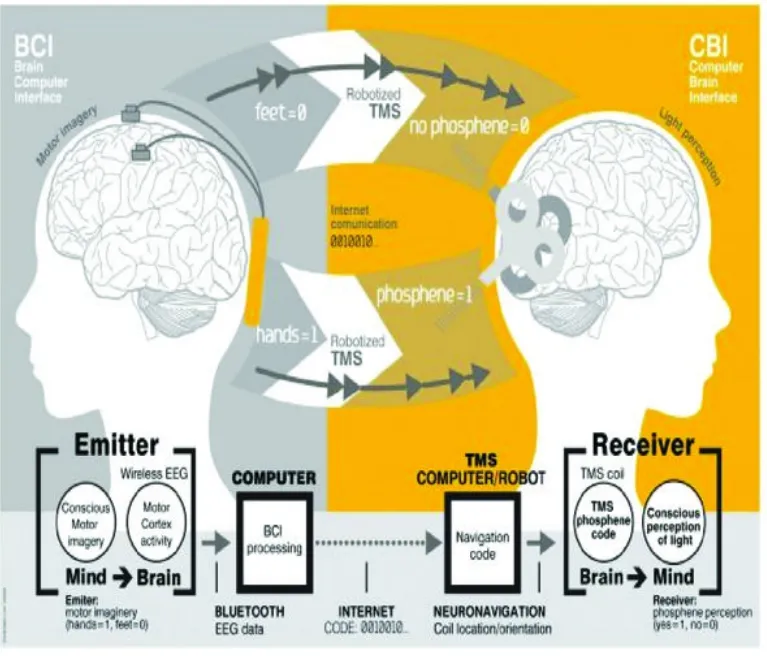
图2 脑-脑通信过程示意图
脑机接口技术将开启人工智能的新阶段,它将直接解读意识并控制客体。〔11〕
3.感知复位和感知替代。视听觉、肢体等替代性和辅助性器官都已经生产出来,实现了人造物连接生物体的神经甚至高级神经系统,并实现了意念控制植入到人体的人造器官。硅芯片植入人的左前臂神经系统中,产生了一部分是人类肉体、一部分是电脑芯片的神奇“电子人”。美国西北工业大学完成了假肢与外周或替代性神经相连。〔12〕总之,人机融合的趋势已经增强,人机边界变得模糊了。
4.感性工学(Kansei Engineering)、丰心工学和情感计算。感性工学的出现体现了设计从单纯考虑产品实用功能向同时注重用户生理体验的转变。感性工学的基本方法是注重用户体验分析,但是对用户感觉特别是非肢体的多种感觉的分析,对用户多层心理的分析特别是量化分析因时代局限有所不足。几年来随着认知科学和信息科学的深化,对用户的生理、心理及其多层面、多模态的信息获取和计算已经具有初步成果。丰心工学和情感计算针对人的内心情绪和感觉的连续变量、不确定性的计算。目前的主要技术包括对情感、感觉及其相关心理数据的采集和表示模式的解读,包括对面部表情、情感表达的自然语言、语音中的感情色彩、生理数据的模式识别。
国内的典型应用是华为设计引入消费者感受分析,实现手机设计的美感提升设计。本世纪初华为手机对产品的心理感受没有给予充分关注,此后华为产品在设计上充分引入设计感情工学,对手机外观形象给予高度重视后将手机业看成时尚业,注重产品的心理效应和艺术效果,而不只是通信功能。由此使华为公司赢得了高端手机的巨大市场份额。

图3 华为手机(引自华为网站)
5.传感技术。传感器模拟了生命体的感知能力,它由原来的各种物理、化学等性质信息的采集功能向着更高功能发展。传统的传感器主要包括机械量、热、光、电、声、医学、生物量的采集、转化、传输和存储。近年来突出的发展包括光纤传感器、集成传感器、微机电系统(MEMS)传感器、智能传感器、网络传感器、生物传感器等等。感知原理也呈复合化趋势,包括了像神经网络学习等多种人工智能技术特征,感知的应用范围极其广阔并且转移速度很快,包括计算系统、实时控制系统、环境、通信系统、生物体等等,实现的应用级功能包括测量、测试、监测、成像、定位、跟踪、导航、制导、控制、生物信号连接和复合等多种。目前在多个传感器的应用中,跨传感器的综合传感应用平台已经出现。如Maxense。此外,传感网络,特别是无线传感网络得到了理论研究和实践,以求获得网络整体上对对象的感知;在网络的联结和激活方法上具有相关性分析等多种模式识别方法和基于人的认知粒度上的认知网络节点通信方法。
6.有意识机器人。已经构建了多个意识模型,这些意识模型包括维特根斯坦和皮亚杰的同构模型、〔13〕现象学的意识模型,等等。在技术层面构造的机器人制造者总结了多层次的意识特征,并开始有了局部实现,这些特征包括:第一人称、方向性(有意向、倾向性)、行为和结果具有确定性的关系、有预期、有信仰和决心、内省(自我意识和体验)、能够意识到外在物、带感情的思想、有混乱度、有感情。〔14〕见图 4、图 5。
图4 日本研究有意识机器人的专著

图5 日本研究机器人感觉的专著
对于制造机器的感觉也有尝试。这些尝试包括用产生人的感觉的那些物理刺激输入给电子线路,产生线路的物理反应(模拟生理和心理反应,如热带来的痛苦和快乐)和器件的群体反应(模拟对于生理反应的某些理性编码,如“痛苦”“快乐”〔15〕)。
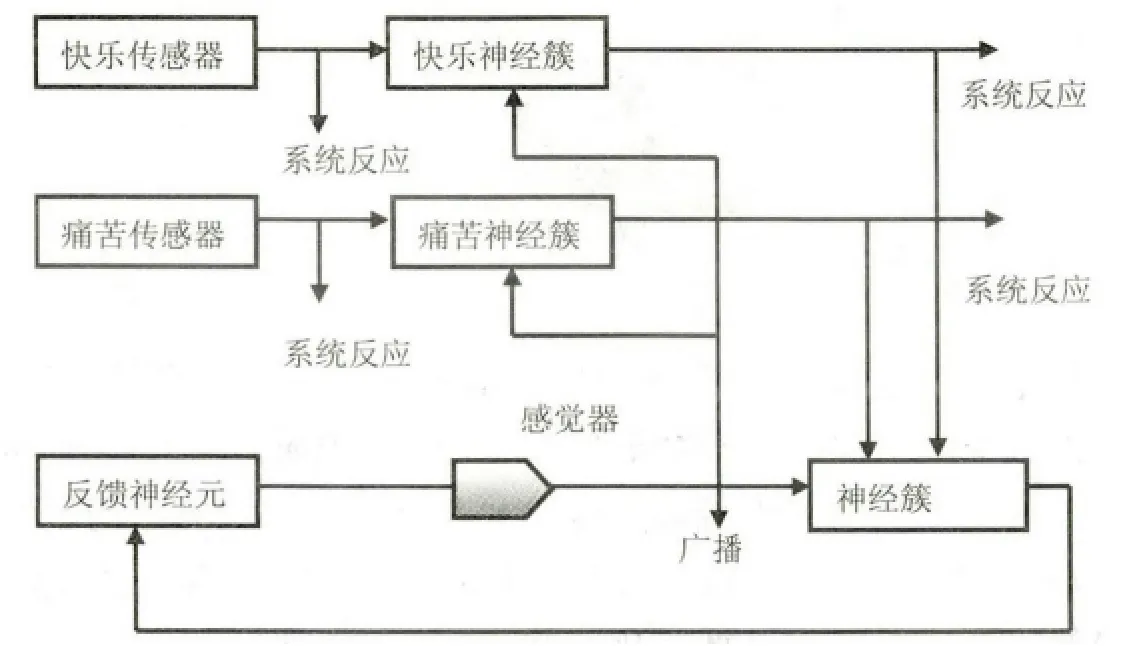
图6 机器人对感觉的模拟图示〔16〕
与有意识机器人探索类似,人工智能领域提出了创造“人水平的人工智能”的口号(Human-Level Artificial Intelligence,HAI)〔17〕:包括人水平智能的环境、任务和智能体特点(Characteristics)和认知体系结构要求(Requirements)。前者侧重要求实现复杂环境下的适应性,后者侧重要求人类的多维认知能力,包括学习、推理、知识能力,也包括低级认知能力如记忆、注意等等。
因此,“传统的”(偏重于符号主义的人工智能学派)正在接受融合,使得符号处理与外界的物理世界产生类人的认知行为的连接。
7.智能硬件及嵌入式认知系统。其基本特征是使机器随环境而实现某些选择和决策。当前广泛应用智能系统的是基于图灵计算的芯片嵌入式系统。智能的基本模式是“如果……那么……(if…then…)”机制,许多系统加入了知识库,并具有推理功能和数值计算功能,以实现基于知识进行决策。
当前开发出的智能产品包括:智能家电、智能马桶、智能电梯、智能手表、智能穿戴、智能手机、智能灯泡、智能开关、智能照明、智能影音、智能DNS、智能路由器、智能摄像机、智能电视、智能电表、智能玩具、智能锁、智能卡、智能设备、智能硬件、智能软件……
8.实时动态控制系统。这些系统包括高级驾驶助理系统、无人驾驶、无人机、卫星、空间登陆系统等等,这些系统正扩大延伸至越来越多的时空环境,其特征一般具有高效的实时计算、通信、执行、控制等系统,其中输入包括图像、激光、雷达等多种物理量的输入和处理。
9.认知通信网络和认知成像技术。上世纪末提出了认知无线网络(Cognitive radio netwaorks,CRN)概念。这是认知科学在通信领域应用的开端。近年来,认知无线网在通信中建立认知环,将外界激励作为不同通信阶段的干预变量实现不同认知粒度的目标模式识别,包括频谱感知,基于认知的接入和传输,实现了网络通信的观察、定位、制定计划、决策、执行等循环步骤,实现了通过无线知识表示语言对无线通信进行对象识别、模式识别和知识推理。〔18〕
认知通信网络是指在多种通信和通信的多个协议或应用阶段加入智能算法,或者类人高级认知功能的网络技术,包括智能网技术,其特征是在有线、无线电话、宽带网络交换系统中通信模式实现智能识别、程序控制、业务加载及调度的智能控制等等。
认知成像技术最初在雷达系统中通过类人的认知功能识别通信中的综合目标模式,显现高维目标特征并成像。理论上带有噪声和多频通信的信号中都存在着高维对象的认知识别的可能。这种识别不仅仅是底层初级信号的识别,识别技术也不仅仅是傅立叶算法等传统算法。〔19〕
10.机器学习技术。机器学习已经走过了半个多世纪的历史。总体看来,以下趋势是明显的。
(1)学习方法的综合化。已经呈现了学习种类的综合运用的趋势,也可以称为混合学习的趋势。例如,将归纳学习和分析学习结合起来,产生了二者结合的学习方法;图模型方法考虑了多个概率相关性节点构成的链条,特别是将独立和不独立事件的概率都考虑进来,相当于传统单一的概率统计机器学习方法的综合;组合学习更是明显组合多种单一结构的学习方法;等等。
学习方法综合化趋势的另一个表现是自适应结构和功能的复合化。典型的实例是人工神经网络的多层化,即多层感知器或构造性神经网络的发明。人工神经网络的多层化使得隐藏层超过原有的1层,形成网络的微结构,通过局部递归构成和刻画不同的维度,形成局部特征识别的功能,并能够存储和递进到更高维度进行高维特征,这使得多层神经网络通过局部递归实现局部优先特征而忽略次要细节,并使局部优先特征加入到整体结构的模拟。多层神经网络的构造相当于原来的一个小型的神经网络被嵌入到大的神经网络之中,形成认知网络功能上的集群化。
多层感知器结构是由Rumelhart,McClenland,Parker于1985-1986年设计的。〔20〕它实际上继承了局部递归的方法。对应综合化的学习方法,在硬件设计上也实现了集群化。例如Google的深度学习项目采用集群CPU进行神经网络学习,使得学习在抽象数学结构和物理结构都实现了集群化。
(2)学习函数的复杂、多样化。以神经网络的学习函数为例,最初的函数仅仅是线性和Logistic函数,此后学习函数逐步扩展到高斯函数、波尔兹曼函数等多种可积函数。在模型改进中,对于权重的调整也从线性转变为连续可积函数,如计算权重梯度计算的方法,实现了下降速度最快的计算方法,实现了多维计算,这种梯度分析的方法在贝叶斯学习等多种学习方法中都有应用,是区别于最小二乘法的一种非线性的重要的学习函数构造方法,并促进在线学习的产生和发展。
(3)学习深度加深。深度学习系指学习结果分层次逐步延伸或完成化,特别是网络层的逐层递归,以至于学习的结果产生质上的飞跃。典型的进展是Hinton〔21〕等应用多层神经网络构造不同维度以降低高维数据,使得图像识别的能力大幅度提高。在此基础上,Google启动的GOOGLE大脑计划,进行图像识别,识别的准确率超出了人的识别能力,并产生多维类人的特征识别结论。见表1。

表1 深度学习的特征〔22〕
(4)生命体认知模式的进一步模拟。以神经网络为典型的机器学习方法借鉴了具有生命体特征的认知模式。神经网络最初从原始网络开始逐步复杂化,逐步地建立多种变量调节的自适应系统、局部递归系统、模拟进化结构,直至近年来建立卷积多层神经网络,其结果是越来越接近生物体的认知模式。特别是卷积和多层神经网络的结构,模拟了多种神经认知模式,包括感受野〔23〕的神经认知机理以及认知神经功能上的集群化〔24〕特征,也模拟了人的学习行为的分层处理模式、〔25〕深层参与学习的神经的分层处理模式。〔26〕
此外一个典型的机器学习范式是流形学习,它实际上也是借鉴了感知的流形处理方式。〔27〕
生命认知的模拟实际上更好地体现了机器学习的本质特征和目的,它在计算模型层面对生命底层特征进行了借鉴,实现了机器在离散状态下认知模式向生命底层认知模式的接近和融合。有人认为,将生命体的学习行为作为认知的基本特征进而实现自然计算建模,将构造出第二代计算模型,并导致认知计算机的产生。〔28〕在这一研究范式下,机器学习对生命体认知过程的拟合实际上只是图灵计算下认知计算趋向于包含非图灵计算的“第二代计算”的前奏或预演。
(5)机器学习和科学哲学的交互作用在加强。在高阶认知模式领域,机器学习和科学方法论都研究人的经验、测试到理论建模的过程。纵观机器学习的方法的历史,发现科学方法论的指导在发挥重要作用。在机器学习早期,主要是20世纪50-60年代,罗素、〔29〕希尔伯特〔30〕等人的逻辑原子主义和形式主义的逻辑观念,包括逻辑的推导方法、逻辑体系构造的规则和作用,都影响了机器学习的方法设计,例如,概念学习、规则学习等都有逻辑的框架。此后,非理性主义的科学哲学思想(库恩〔31〕的科学结构思想和拉卡托斯〔32〕的证伪主义)对非机器学习摆脱对逻辑符号计算的依赖有启发意义。鉴于此,虽然有反对者,但是对科学哲学特别是科学方法论影响机器学习方法设计还是得到广泛认可的。就是说,在机器学习的方法背后,存在着更一般、更抽象、更本质化的思想运动。鉴于此,文献〔33〕总结了这一作用,并提出实际上存在着机器学习和科学哲学的双向影响运动,即机器学习也影响着科学哲学的方法构建。这一机理可以用图7表示如下(连线表示直接的双向影响):

图7 机器学习和科学哲学的交互作用示意图
一个典型的实例是,贝叶斯网络和马尔科夫链的学习方法都体现了莱辛巴赫独立事件公共原因的结果;而贝叶斯网络和马尔科夫链的学习方法的机器学习方法的进化又促进了因果性和概率性的独立和依赖关系研究。从该文献发表后的10年间看来,两个领域的互动趋势还在加强。
11.自动推理。已有的逻辑学分类大致将逻辑学分为“传统”逻辑(亚里士多德的三段论理论)、“经典”逻辑(二值语句演算)、“扩展”逻辑(模态逻辑、时态逻辑、道义逻辑、认知逻辑等)、“异常”逻辑(多值逻辑、直觉主义逻辑、量子逻辑、自由逻辑)、“归纳”逻辑。〔34〕自动推理技术实现了传统逻辑、经典逻辑、直觉主义逻辑、归纳逻辑的自动推理。其中,直觉主义逻辑不接受排中律,因此其演算规则与经典逻辑(一阶逻辑)有所差异。由于哥德尔的解释方法实现了与经典逻辑的同构,这使得可以完全由经典逻辑解释直觉主义逻辑证明。归纳逻辑已经在逆推数学中被证明可以由递归方法构造和实现,因此可以由图灵计算实现。
量子逻辑受限于物理系统的进展限制,目前仅仅实现了几位比特的量子计算,量子态的传输距离也仅仅是一二百公里,因此量子逻辑的自动化实现基本是没有实现。
近期的自动推理可以在三个领域有重要的进展,即HOL高阶推理机的研制成功,传统逻辑的完全协调化、经典化与自动化,以及确定性逻辑与不确定性逻辑的融合。
HOL是高阶逻辑的简称,由剑桥大学等单位研制,可执行在ZF(策梅落-弗兰克公理体系的定理自动证明),允许应用高阶逻辑进行定理自动证明。
传统逻辑的完全经典化由本文作者实现。〔35〕传统逻辑主要由亚里士多德三段论构成。但是长期以来三段论能否被经典逻辑(一阶逻辑)解释和表达一直没有确凿证明。此外,对于传统逻辑的不一致性问题也没有明确提出和解决。这都影响了传统逻辑的自动推理的实现。作者在蔡曙山教授的指导下对于扩展的三段论的研究证明了传统逻辑的不一致性,给出了消解不一致性的方法,并提出了符合经典逻辑的三段论形式(扩展的三段论)及其推理的数学模型,从而实现了传统逻辑的协调化、经典化和自动推理。
自确定性逻辑与不确定性逻辑分立以来一直存在相互融合的努力。从逻辑分类中可以看出,“异常”逻辑包括多值逻辑。对于经典逻辑值二值的分割产生了多值逻辑(包括格值逻辑);对于命题的概率性分割也产生了“异常”逻辑,即不确定性逻辑。一个经典命题α的概率性的分割表示为P(α)。其中P为概率函数。于是任意命题都可能有一个概率赋值,从而使确定性的命题完全转变为概率性的命题。对于一阶逻辑命题的概率化最初由Gaifman在20世纪60年代提出。〔36〕这样,确定性逻辑与不确定性逻辑开始融合,确定性逻辑称为不确定逻辑的特例,即P(α)=1。这样,计算命题的概率成为概率逻辑的首要问题。一个研究方向是通过研究命题的环境变量对命题真值的影响,计算命题概率或真值,由此建立了可能世界语义学。
可能世界语义学影响命题真值的外省变量。一个研究方向是通过原子命题的概率计算符合命题。对于被概率赋值的多个命题,将初始命题集合赋值,并按照贝叶斯公式计算,构建一个条件概率关系网络,即形成贝叶斯网络。这一方法实现了命题之间的概率关系计算,由此发展为贝叶斯逻辑(Bayesian Logic,BLOG)。一个重要的发展趋势是这两个研究方向的融合。在这种研究范式下,给定一个概率模型,逻辑语句α的概率是α为真的所有可能世界ω∈Ω的总概率。但是,在贝叶斯概率中,可能世界的样本构成要求是全面的,即域值是封闭的。最新的可能世界语义学演进为开放世界概率模型(也称“开放宇宙概率模型”,Open Universe Probability Model,OUPM)〔37〕,其建模方法将变元变成开放域,定义了可能世界的概率分布,以代替可能世界中样本的全域。在应用中,很好地解决了现实世界中不全面的对象世界的状况,并开发了BLOG编程语言,〔38〕成为当前融合确定性逻辑和贝叶斯逻辑的最新进展。
12.类脑计算。目前,传统计算机芯片主要基于冯诺依曼架构,处理单元和存储单元分开,通过数据传输总线相连。芯片总信息处理能力受总线容量的限制,构成所谓“冯诺依曼瓶颈”。而且传统计算机的处理单元一直处于工作状态,导致能耗巨大。同时,由于需要精确的预编程,传统计算机无法应对编程以外的情况和数据。而大脑结构则完全不同:神经元(处理单元)和突触(存储单元)位于一体,不需要高能耗的总线连接,突触是神经元之间的连接,具有可塑性,能够随所传递的神经元信号强弱和极性调整传递效率,并在信号消失后保持传递效率。突触的这种性质,使大脑神经网络结构动态可塑,能够随外部数据的变化而自适应调整,神经元只在工作时消耗能量,大脑的功耗极低;可大规模并行处理多个信号;具备学习能力,在海量数据处理方面具有巨大优势。近期的重要研究动向是IBM对于类脑计算芯片的研究。〔39〕此外,在冯诺依曼架构下的类脑算法也在研究。
13.空间认知。空间认知包括空间信号的模式识别,如卫星定位数据、空间信息网络、方位识别系统、地理信息、交通信息、城市信息等等。识别的重要趋势是识别对象的集成度越来越高。此外,逻辑的方法和数值计算的方法都有拓展。目前的进展除传统的空间数据矢量处理方法外,在空间特征的计算还包括不同环境下的空间数据智能化处理,如地外空间(月球、太阳系等)对象的识别和实时处理,也包括爱因斯坦广义相对论不同宇宙模型的计算。〔40〕此外,逻辑的方法也有初步的发展,即通过空间识别的逻辑公理系统推理识别空间特征。〔41〕
14.智能制造。智能制造包括将认知方法和技术应用于制造业的组织、控制、设计、生产与管理,包括这些制造流程的信息获取、融合、处理与利用的智能化。目前的重要趋势包括广为人知的欧盟、美国等工业4.0的发展战略。由于认知功能促进了智能技术向更高形式发展,在广为应用智能技术的制造业,认知科学具有一定影响。当前,德国联邦教育研究部《高技术战略2020》于2013年将工业4.0(Industrie 4.0)确定为十大未来项目之一,并已上升为国家战略,旨在支持工业领域新一代革命性技术的研发与创新,并迅速影响全球制造业发展战略的制定。工业4.0计划的一个核心理念是以智能技术作为重要的支持手段,强调制造的智能化管理和制造,即“智能工厂”和“智能生产”,认知科学是其中的重要应用原理,如自动化技术是其重要内容。这些认知相关技术,包括生命数据的获取和生命支持,也包括人性化设备的制造和服务,还有典型的智能应用技术如智能控制,人的高级认知功能模拟等等,这都体现了认知科学的基本规律和理念,并展示了认知科学与人工科学的融合趋势。
三、企业界的认知创新活动
企业界的认知创新活动敏感地反映了认知科学产业化的效果。
在制造业,特别是信息产业,认知活动已经逐渐成为引领企业技术创新的方向和动力。
一个很好的实例是2014年《麻省理工科技评论(MIT Technology Review)》杂志评选了全球50大智慧公司,其创新技术中涉及认知功能的技术占有很大比例,见表2。
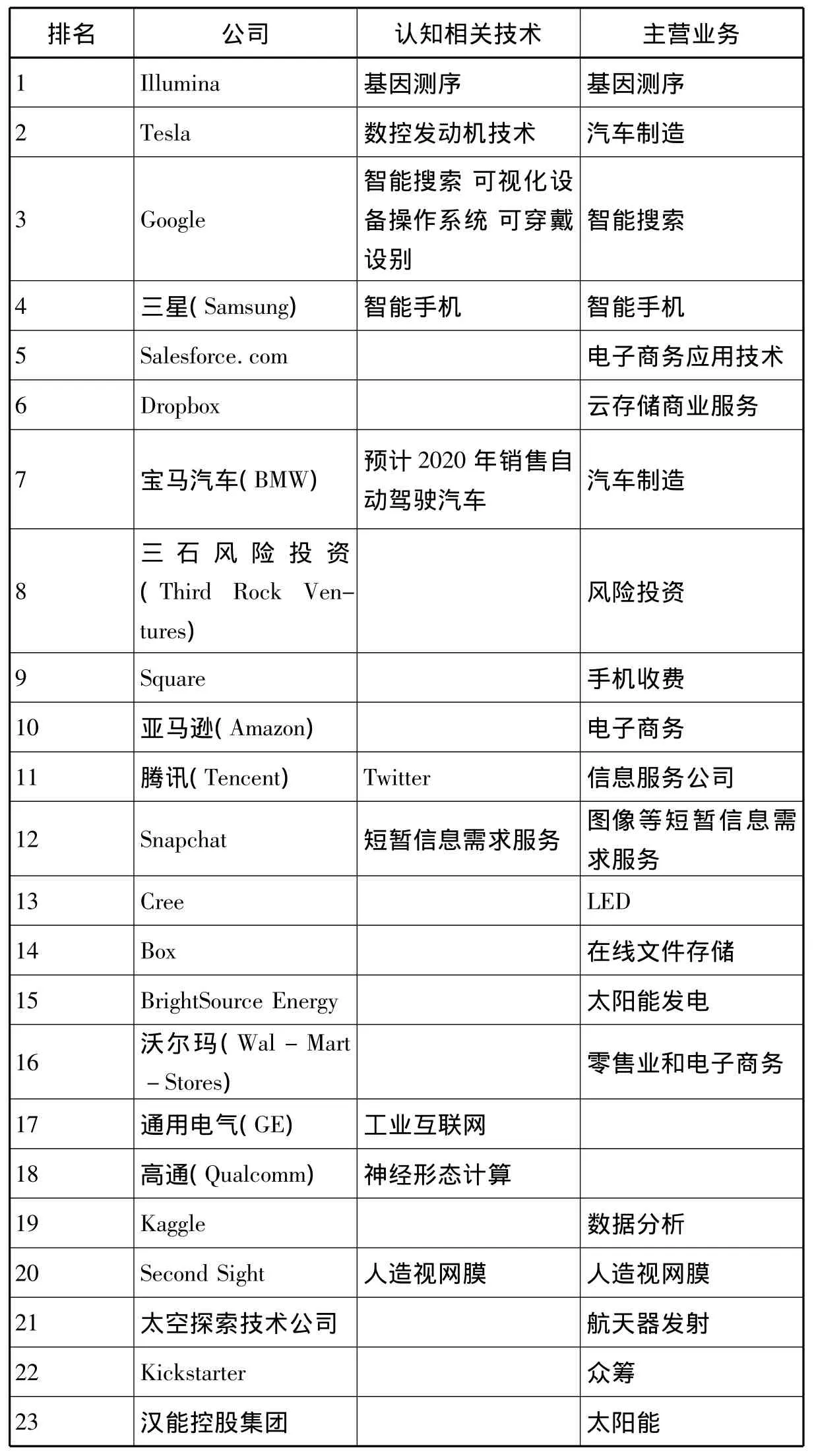
表2 2014年《麻省理工科技评论》杂志评选的全球50大智慧公司及其研发概况〔42〕

作者根据《MIT Technology Review》绘制
四、认知科学对科学范式的影响
科学范式是库恩提出的概念。〔43〕其含义是科学研究领域(科学问题及其相关命题)基本特征和历史演进模式。根据库恩的观点,科学的构成及其演进并非完全客观化的或没有规律或规则的,而是存在科学家某种选择的影响。这种影响大体上遵循接受某种核心命题,并证明其正确性、扩展其衍生性、最后达到发现和证明理论体系的危机阶段,进而产生这一整体命题体系的革命。例如牛顿力学发展为相对论力学;牛顿力学扩展为量子力学都是范式的转换实例。
考察上述认知科学对于人工科学的影响领域可以看出,人工科学实际上构建了一个科学范式,也就是说,科学技术都在仿人,或仿人的认知功能,其特征在于,科学和技术总是平行于人类认知功能去揭示、发现、构造知识、方法和技术系统……有什么认知功能,就要构造什么人工系统,进而发现相应的科学规律和方法;换言之,凡是可以抽象出的人的认知功能,科学就努力平行地按照这一功能发现其规律,构造其功能和系统。这使得科学发展的范式不只是库恩提出的科学论证、危机、革命的范式,而是平行范式,构造出模仿认知功能的系统或方法,在类人、仿人地解释相应知识基础及方法设计基础。学科发展的内驱力不再只是针对科学家偏颇地构造出可证伪性,而是仿人认知功能去构造研究方法与领域。这样,学科知识的进化范式就是研究领域和方法拟人化、构造模仿人的实际能力。由此看出,人工科学、进而科学发展的内因是对人类认知功能的模仿。
五、结 论
认知科学在科学技术综合发展中起到越来越重大的引领作用,包括:高维度认知能力的揭示;产品和服务的认知能力的强化和泛化;人机交互和融合的深化。在上述14个人工科学和产业领域中明显地体现了认知科学的重大影响。在全球范围内,企业创新已经融入了认知科学的方法和技术。在学科发展上构造了一个新的科学模式,即发现和构造科学技术中类人认知规律系统及其人工系统。
注释:
〔1〕M.C.罗科、W.S.班布里奇:《揽聚合四大科技 提高人类能力——纳米技术、生物技术、信息技术和认知科学(NBIC)》,蔡曙山、王志栋、周允成等译,清华大学出版社,2010年。
〔2〕Jeff Johnson:《认知与设计》,张一宁译,人民邮电出版社,2011年。
〔3〕李奋强:《设计的科学研究活动分析》,《2004年国际工业设计研讨会暨第九届全国工业设计学术年会论文集》,第496-499页。
〔4〕http://www.nasdaq.com/markets/ipos/company/tripath-imaging-inc-330-9021.
〔5〕www.cytyc.com.
〔6〕Van J.Wedeen et et al.The Geometric Structure of the Brain Fiber Pathways.Science,2012,Vol.335,No.6076,pp.1628-1634.
〔7〕Kay,K.N.,Naselaris,T.,Prenger,R.J.,& Gallant,J.L.,Identifying natural images from human brain activity.Nature,2008,Vol.452,pp.352-355.
〔8〕GM Mckhann,Cortical control of a prosthetic arm for self-feeding,Nature,2008,Vol.453,No.7198,pp.1098-101;AB.Kalaska et.al.Brain control of a helping hand,Nature,2008,Vol.453,No.7198,pp.994-995.
〔9〕Can brain scans read your mind?Study by UCLA,Rutgers neuroscientists provides new insights Stuart Wolpert,July 22,2009;http://newsroom.ucla.edu/releases/can-brain-imaging-read-minds-96682.
〔10〕张寅生:《脑的逻辑功能的功能核磁共振成像及其哲学意义》,《医学与哲学》2008年第11期,第27-29,55页。
〔11〕Carles Grau et al Conscious Brain-to-Brain Communication in Humans Using Non-Invasive Technologies.Brain Stimulation,2015,Vol.8,No.8,p.323.
〔12〕D·卡西·库伦(D.Kacy Cullen)、道格拉斯·H·斯密斯(Douglas H.Smith):《让假肢拥有神经》,曾洪译,《环球科学》2013年第2期。
〔13〕Zhang Yinsheng.The Mathematic Model of Consciousness,Second Asia International Conference on Modeling and Simulation,IEEE press,2008,pp.574-578.(EI)
〔14〕Kitamua.T,Tahara T.Asami KI.How can a robot have consciousness?Advanced Robotics,2000,Vol.14,No.4,pp.263-276.
〔15〕〔16〕Pentti O Haikonen.Consciousness and Robot Sentience.(One of Serials on Machine Consciousness),World Scientific Publishing Co.Pte.Ltd,2012.
〔17〕Sam A.Adams et.al.Mapping the Landscape of Human-Level Artificial General Intelligence AI Magazine,2012,Vol.33,No.1,pp.25-42.
〔18〕魏急波等:《认知无线网络:关键技术和研究进展》,《通信学报》2011年第11期;李绍谦等:《认知无线网络无线传输技术》,国防工业出版社,2014年。
〔19〕孙凤莲、张群、罗迎等:《基于压缩感知的稀疏孔径认知ISAR成像方法》,《通信学报》2012年第Z2期;陈怡君等:《基于认知ISAR成像的相控阵雷达资源自适应调度算法》,《电子与信息学报》2014年第7 期;Sun Feng-lian,Zhang Qun,Luo Ying,et al..Imaging method based on compressed sensing for the cognitive sparse aperture of ISAR.Journal on Communications,2012,Vol.33,No.Z2,pp.1-8;Luo Ying,Zhang Qun,Hong Wen,et al..Waveform design and high-resolution imaging of cognitive radar based on compressive sensing,SCIENCE CHINA(Information Sciences),2012,Vol.55,No.11,pp.2590-2603.
〔20〕Rumelhart.D.E.,McClenland.J.L.Parallel distributed processing:exploration in the mocrostructure of cognition.Cambridge.MA:MIT Press,1986,Vol.1,2.
〔21〕Hinton G,Salakhutdinov R.Reducing the dimensionality of data with neural networks,Science,2006,Vol.313,No.504;Geoffrey E.Hinton Learning multiple layers of representation.TRENDS in Cognitive Sciences Vol.11,No.10,pp.428-434.
〔22〕Nicola Jones,The Learning Machines,Nature,2014,Vol.505,pp.146-148.
〔23〕Lindeberg,T.A computational theory of visual receptive fields,Biological Cybernetics,2013,Vol.107,No.6,pp.589-635.
〔24〕Timothy J.et al.Synchronous Oscillatory Neural Ensembles for Rules in the Prefrontal Cortex,2012,Vol 76,Issue4,pp.838-846.
〔25〕Marton F,saljo R.On qualitative differences in learning:I—out come and process.British Journal of Educational Psychology.1976,Vol.46,pp.4-11.
〔26〕Lee T S;Mumford D;Romero R,The role of the primary visual cortex in higher level vision Vision Research,1998,Vol.38,No.15-16,pp.2429-2254;Lee T S,Mumford D Hierarchical Bayesian inference in the visual cortex Journal of the Optical Society of America.A,Optics,image science,and vision,2003,Vol.20,No.7,pp.1434-1448.
〔27〕Seung H,Lee D.,The manifold way of perception,Science,2000,Vol.290,pp.2268-2269;Tenenbaum J,Silver V D,Langford J.A global geometric framwork for nonliner dimensionality reduction.Science,2000,Vol.290,pp.2319-2323;Roveis S,Saul L.,Nonlinear dimensionality reduction by locally linear embedding,Science,2000,Vol.290.
〔28〕Gordana Dodig-Crnkovic.Modeling Life as Cognitive Info-conputation,Language,Life,Limits/10th Conference on Computatability in Europe,CIE 2014 Budapest,Hungary,June 23-27,2014 Proceedings,Springer,2015,pp.153-192.
〔29〕伯特兰·罗素:《逻辑与知识》,商务印书馆,1996年。
〔30〕D.Hilbert,W.Ackermann,Principle of Mathematical Logic,AMS Chelsea Publishing.2000;希尔伯特:《数学问题》,大连理工大学出版社,2009年;embedding.Science,2000,Vol.290,pp.2323-2326.
〔31〕〔43〕托马斯·库恩:《科学革命的结构》,北京大学出版社,2003年。
〔32〕拉卡托斯:《数学、科学和认识论》,商务印书馆,2010年。
〔33〕Jon Williamson,A Dynamic Interaction Between Machine Learning and the Philosophy of Science,Mind and Machines,2004,No.14,pp.539-549.
〔34〕苏珊·哈克:《逻辑哲学》,商务印书馆,2003年。
〔35〕张寅生:《扩展的三段论及自动推理》,科学技术文献出版社,2009年;张寅生:《传统逻辑协调化、经典化和自动化的实现》,《济南大学学报》2016年第1期。
〔36〕Gaifman H,Concerning measures in first order calculi,Israel Journal of Mathematics 1964,No.2,pp.1-18;Gaifman H,Concerning measures on Boolean algebras.Pacific J.Math,1964,No.14.pp.61-73.
〔37〕Brian Milch et.al.BLOG:Probabilistic Models with Unknown Objects.19th International Joint Conference on Artificial Intelligence(IJCAI):2005,pp.1352-1359.
〔38〕Stuart Russell:《统一逻辑和概率方面的最新进展》,《ACM通讯》2015年第7期。
〔39〕〔美〕唐旖浓:《国类脑芯片发展历程》,《电子产品世界》2015年3月26日。
〔40〕Yinsheng Zhang,Architecture and Performance Methods of A Knowledge Support System of Ubiquitous Time Computation,Journal of Software,2013,No.11,pp.2947-2955.(EI)
〔41〕约翰·范本特姆:《逻辑、认识论和方法论(IV)》,科学出版社,2013年。
〔42〕麻省理工科技评论编辑部:《麻省理工科技评论(MIT Technology Review)》2014年1/2月刊,第40页。
猜你喜欢
法律方法(2022年2期)2022-10-20 06:44:24
中学生百科·大语文(2021年11期)2021-12-05 14:27:54
纺织科学研究(2021年7期)2021-08-14 01:42:34
小小艺术家(2019年6期)2019-06-24 17:39:44
科学中国人(2018年9期)2018-07-06 09:34:56
科学中国人(2017年32期)2018-01-15 02:26:47
37°女人(2017年11期)2017-11-14 20:27:40
哲学评论(2017年1期)2017-07-31 18:04:03
西藏科技(2016年5期)2016-09-26 12:16:22
今古传奇·故事版(2016年15期)2016-09-07 06:57:32