基于混合动力工程机械全功率模糊匹配设计
2015-12-15 10:45:26付莹胡恒
电气自动化 2015年1期
付莹,胡恒
(广西柳工机械股份有限公司 a装载机研究院;b挖掘机研究院,广西 柳州 545007)
0 引言
混合动力工程机械的出现是适应当代“节能”号召下工程机械界的产物,而油电混合动力又是其中运用较多的产品之一,它越来越受到各大工程机械厂家的青睐与重视。在油电混合动力工程机械中,挖掘机是其中较有代表性的一种。对于混合动力挖掘机而言,为了达到低油耗的目标,通常采用的是调整液压泵的排量从而实现动力源与液压泵的功率匹配[1-3]。还有些较先进的机型例如油电混合动力,采用的是调整电机的工作方式和输出扭矩,当外界负载较低时,将电机作为发电机使用,将能量存在超级电容中。待遇到重载时,根据超级电容可用能量的大小,去填补发动机功率的差值或调整泵的排量,从而实现低油耗的目标。这样就可以达到发动机、泵、电动机三者间的功率匹配[4]。这种控制的方式通常是选择电机的助力或调整泵的使用功率,对液压泵与电机转矩进行同时调整的文章则比较少。
文章针对混合动力工程机械发动机、液压泵与电容之间的功率匹配问题,提出了一种基于模糊理论的两级模糊控制方法,这种方法根据泵功率的消耗情况、发动机的负荷状况及电容的电量,进行两级模糊决策,同时调整泵功率与电动机的助力力矩,从而实现三者能量之间的动量平衡,达到整机的相对高作业效率与低油耗。
1 模糊控制器
模糊控制器主要由模糊输入集合,MAMDANI推理及去模糊化三部分组成,它们是整机控制器的运算核心。模糊输入集合是预先设定的一系列模糊化输入域,这个输入域包含了输入量的对应的整个范围。MAMDANI推理则根据得出的适配度去计算相应的输出。去模糊化为将模糊参数处理成精确化的输出参数。
对于混合动力挖掘机而言,确定助力时刻点是很重要的。首先需要知道发动机与泵的能量消耗信息,为此,将发动机的掉速率e(t)与泵的消耗功率x(t)作为模糊控制器的两个基本输入。为了保证发动机不会因为功率不足导致降速后冒黑烟现象,就需要在发动机即将降速之前进行助力或调小泵功率,对此,就需要知道泵消耗功率的变化率dx(t)/dt,其控制原理图见图1所示。
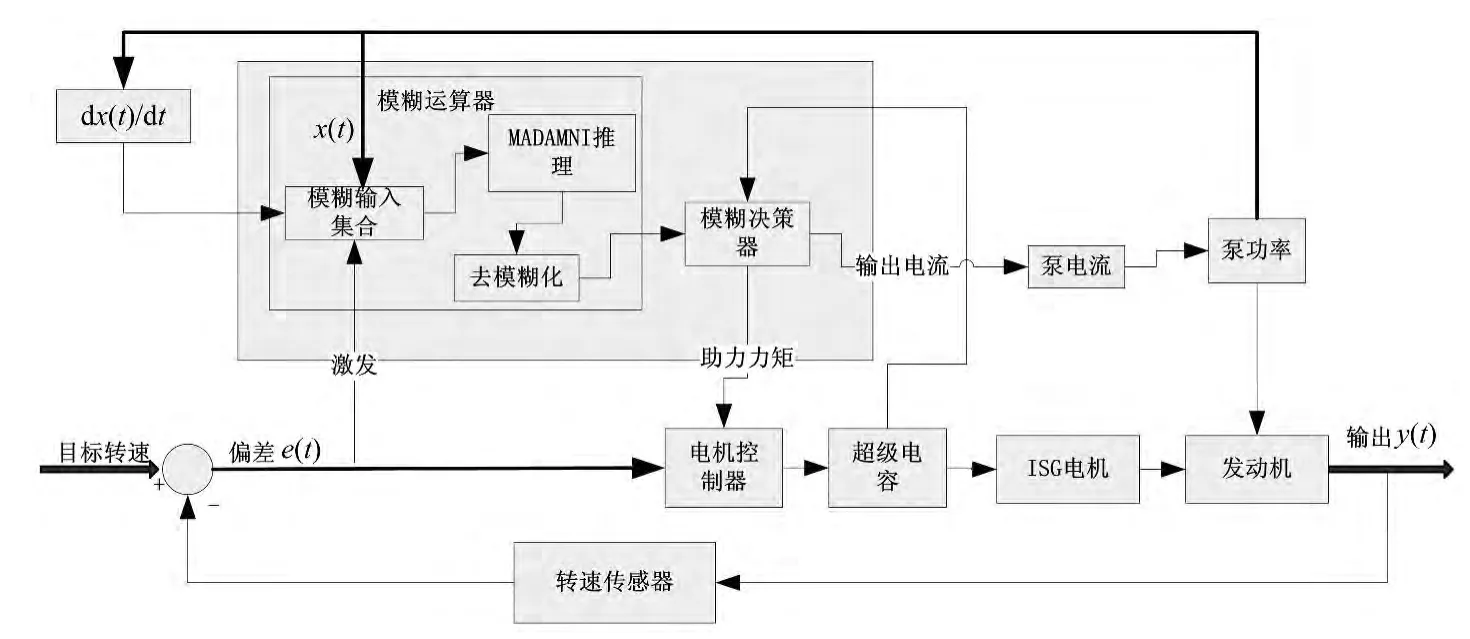
图1 模糊控制图
图1 中,为了能使整机的油耗达到较低的状态,发动机储备功率不足,就会掉速,当掉速到一定程度时就会出现冒黑烟现象,为了防止冒黑烟的产生,就需要在发动机功率不足的情况下进行辅助做功,做功的大小由泵瞬时消耗功率与发动机的输出功率差值来决定。为此,第一级模糊控制首先根据输入信号判断发动机在重载时欠缺的力矩。随后,将推算出的力矩与超级电容的能量作为第二级模糊控制器的输入(若电量够,则维持原先的助力力矩,不够,需调低泵减压阀电流或降低力矩),最终推理出助力力矩及泵输出电流,从而实现整机全功率匹配控制。通常用三角模糊数来表示发动机,泵等部件的输入模糊数[5]。
为了验证上述模糊算法的正确性,需要将它应用在混合动力挖掘机具体的模型上。
2 混合动力挖掘机整机动力模型的建立
混合动力挖掘机的整机系统部件主要由发动机、电动机、超级电容、恒功率变量泵和环境于一体的综合性模型。这些部件有机配合,共同影响着整机的运转。因此,可以说,部件的协调性越好,整机的综合性能越高,油耗就会越低[6]。
(1)发动机模型

(2)ISG电机助力模型

(3)超级电容模型
超级电容是回转电机的能源机构,放电量的大小决定着回转电机的最大回转力矩,其放电曲线为:

(4)恒功率变量泵模型的消耗力矩

因此,其整机约束模型为:

因此,发动机的最大输出力矩可表示为:

3 仿真验证及试验结果输出
MATLAB与AMESIM在仿真方面各自都具有较强的分析处理性,前者在设计控制算法中具有较强的优势,而后者在模型关系处理中比较清晰明朗。二者之间可通过联合仿真,能较准确的对系统进行分析处理。因此,仿真模型的建立以二者作为建模平台。
3.1 混合动力挖掘机仿真模型建立
为了验证所提出的双层式模糊控制器的可行性,在MATLAB中构建双层式模糊控制器如图2所示。该图中的S_FUNCTION为部件的挖掘机硬件的反馈参数,反馈参数输出的四个参数(pressure,distance,Volt,eng_spd),经过两级模糊控制器(fuzzy calculate与fuzzy decision)运算后,将运算的结果再输入到硬件模型所描述的S_FUNCTION中去,从而达到精确的控制。对于硬件模型而言,如发动机、超级电容、电动机、液压泵之间连接的关系图见图3所示。控制器(Double fuzzy controller)接收四个输入信号(pressure,distance,Volt,eng_spd),见图3 中虚线箭头所示,经过计算后输出两路控制信号给电机系统与液压泵比例电磁阀(current,torque),见图3中实线箭头所示。从而实线两级模糊控制。
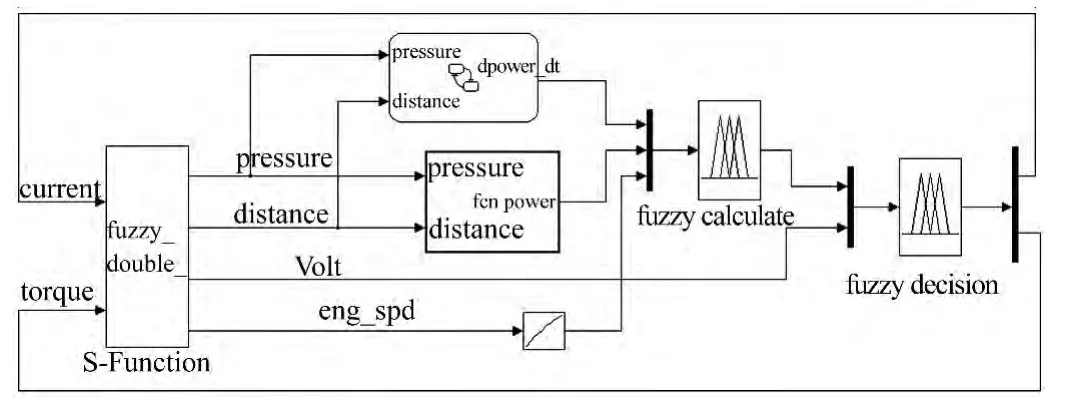
图2 MATLAB控制系统建模
3.2 仿真输出及实验分析
为了验证二级模糊混合动力控制系统的控制效果,在设置相同的负载前提下,将所建的混合动力模型与传统的液压模型两类模型进行对比仿真。他们配置了相同的液压系统参数与负载输入。设置第一级模糊控制器中发动机的掉速模糊数为差额x(t)的模糊输入集合为泵消耗功率的变化率dx(t)/dt的模糊输入集合为超级电容电压的3个模糊输入集合为;第二级模糊决策器中力矩的模糊输入集合为;进行仿真测试。两种仿真模型的发动机转速波动曲线如图4、图5所示。综合对比情况见表1。
从表1可以看出,二级模糊决策的混合动力控制系统发动机的最大降速为90 r/min,小于传统的液压控制系统140;超调量与回调时间也较小。此外,在油耗上,二级模糊控制的一个循环周期油耗为15.3 g,小于传统对泵调节的液压系统22 g,从而验证,二级模糊控制系统在仿真模型上对于传统的液控系统而言,具有较高的能量利用率及节油性。
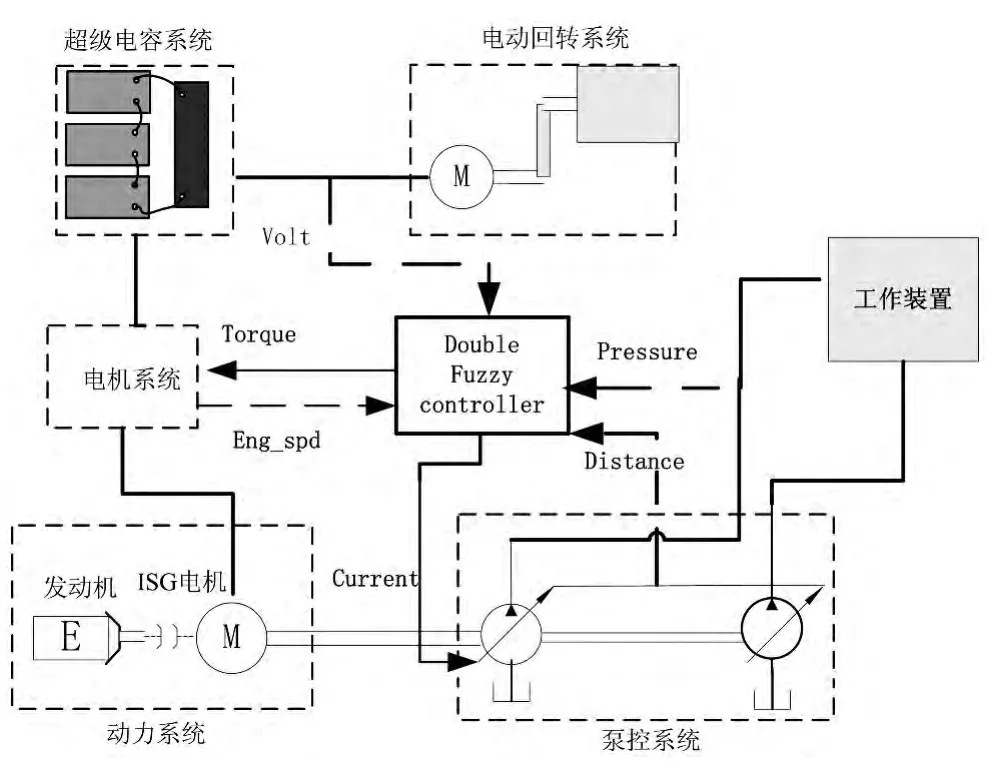
图3 混合动力液压系统部件关系图
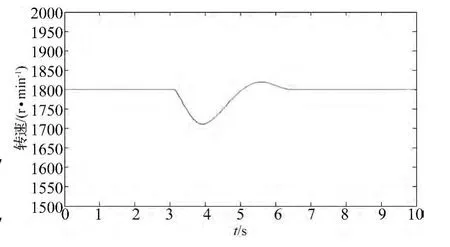
图4 混合动力模型转速波动图
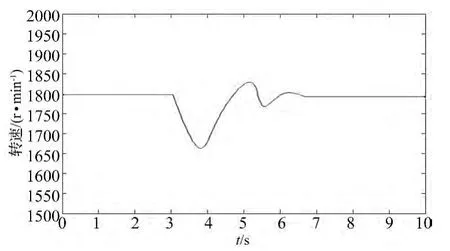
图5 液压模型转速波动图

表1 仿真结果输出对比表
4 结束语
针对混合动力挖掘机部件间的能量匹配问题,文章从混合动力挖掘机的发动机,液压泵,超级电容三者之间的能量匹配出发,主要研究了以下几点:
(1)设计了一种二级模糊控制系统,这种模糊控制系统能够根据部件及实际负载的状况动态的调整泵电流与电机的助力转矩,在保证整机一定的工作效率的同时,达到了发动机,液压泵与超级电容三者之间能量的有效利用。
(2)通过仿真及试验对比,对二级模糊控制系统的正确性与有效性进行了验证。结果表明,这种控制策略能够有效的降低发动机的转速波动,从而极大的降低整机的燃油消耗,达到能量的高利用率目的。
[1]常毅华,何清华,赫鹏.液压挖掘机功率协调控制节能系统研究[J].工程机械,2006,43(3):19-22.
[2]彭天好,杨华勇,傅新.液压挖掘机全功率匹配与协调控制[J].机械工程学报,2001,37(11):50-53.
[3]尚涛,赵丁选,肖英奎,等.液压挖掘机功率匹配节能控制系统[J].吉林大学学报:工学版,2004,34(4):592-596.
[4]王冬云,管成,潘双夏,等.液压挖掘机功率匹配与动力源优化综合控制策略[J].农业机械学报,2009,40(4):91-95.
[5]朱传宝,涂晓丹,邓园.液压挖掘机节能控制系统研究[J].建筑机械技术与管理,2011,24(5):109-112.
[6]陈欠根,费望龙,蒋苹.液压挖掘机功率匹配节能方法研究[J].建筑机械,2007,27(12):65-68.
猜你喜欢
装备制造技术(2020年4期)2020-12-25 05:26:14
山东青年(2016年12期)2017-03-02 18:22:48
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
探测与控制学报(2015年4期)2015-12-15 15:00:56
电源技术(2015年1期)2015-08-22 11:16:20
电源技术(2015年7期)2015-08-22 08:48:50
有色金属设计(2015年2期)2015-02-28 21:08:56
筑路机械与施工机械化(2014年10期)2014-03-01 03:02:09
筑路机械与施工机械化(2014年8期)2014-03-01 03:00:56