
计算机视觉技术在移动机器人中的应用
2015-12-15 10:47吴震宇黄佳
电气自动化 2015年4期
吴震宇,黄佳
(1.上海电气自动化设计研究所有限公司,上海 200023;2.华东理工大学,上海 200237)
0 引言
伴随着机器人技术相关理论、设计、制造和应用的逐渐成形,移动机器人技术在军事、工业和家庭服务业中得以广泛应用,并愈发引起人们的关注。其中移动机器人目标动态跟踪和3D空间场景重构成为了目前一个研究热门方向[1-3],[4]1。本文在综合国内外移动机器人的研究现状的基础上,针对中国服务机器人大赛竞赛规则和特点,设计了一种基于双目视觉的机器人视觉系统,其中采用OpenCV、OpenNI、OpenGL等主流计算机视觉平台,提出了将2D平面图像重构3D立体空间图像的算法策略,并将其作为移动机器人的物体跟踪的手段,取得了良好效果。
1 移动物体的识别检测的简化和优化
1.1 基于OpenCV的移动物体的识别检测简化
OpenCV的特点是在复杂的背景环境中,可以将检测视频流中目标移动物体的轮廓、形状、颜色等参数,从背景中进行分离[5],[6]。这对于运行中的移动机器人目标判断非常有益。
其主要流程是:视频的获取→视频格式转换→获取图形的预先处理→将目标物从背景中提取→缩小周边背景对于图像处理的误影响→运动物体特征的判别→运动物体的精确跟踪。
从上述流程可以看出,其核心是被检测物体从复杂环境中剥离。算法提取和剥离的过程就是将视频流每一帧画面的差异鉴别出来。
就移动机器人目标动态跟踪而言,检测速度是运动物体跟踪效果的关键,因此对其监测流程算法必须进行优化,缩短检测时间,对此,本文在原有算法的基础上以下二方面进行简化:
在动态图像获取方面,采用了实时截取视频图像的方法。
在图像的预处理方面,则采用了对捕获到视频流图像的噪点进行预处理滤除的方式,以达到平滑图像,对背景图像进行初始化和更新的目的,以利于在图像检测时,物体和背景和前景的分割。
在以上简化的基础上,通过阈值化,可以以得到的运动物体的二值化图像,将前景物体从背景分离出来。
优化调试程序也是提高监测速度的重要手段,经过不断改变阈值大小并反复对比测试,可以提高对目标物体捕捉的准确性。同时根据环境条件(诸如光照强度、光照角度等)的变化,预设优选的阈值条件,使检测和跟踪的性能可以满足移动机器人的判读需要,兼顾了图像的质量和速度。
1.2 基于Kinect的移动物体的识别检测简化
如图1所示,视频头的视场由近及远呈现出三角型,即离镜头越远的对象较之较近的对象有较大的视场,这反映出影像的宽度与高度,与视频头所处的物理位置之间并非完全对应。
为了简化视频分析,提高解析速度,本文利用截取图像中特定位置的深度值,并将深度图与RGB像素图结合,找出目标物体与摄像头的距离,从而进行实时分析判断。对深度图中像素进行分析是,像素点信息通过16位的数据来定义。根据BytesPerPixel原理,一个像素占用二字节,因此每一个像素的深度值只占用了13个位字节。如图2所示
2 视频头坐标的标定
视频头坐标的标定是基于透视几何原理,其本质就是坐标变换:对视频头本身的坐标系,现实物体的自然坐标系,2D图像的平面坐标系进行转换,即可实现对于3D的重构。
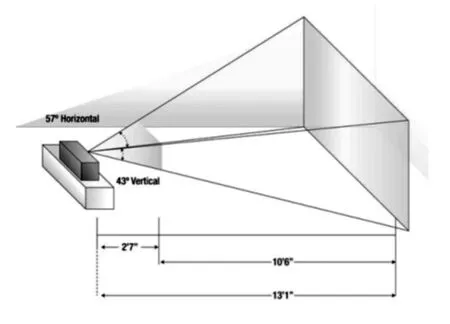
图1 Kinect视野范围示意图
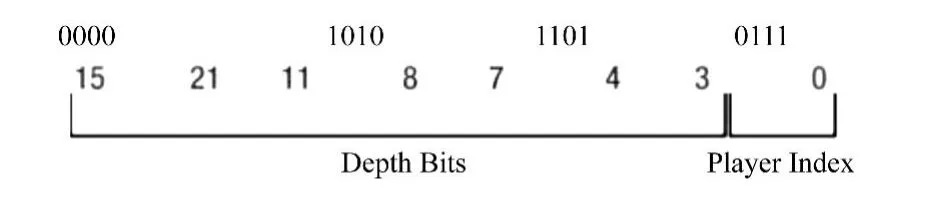
图2 深度值图
1)视频头坐标到2D坐标的转换
首先必须对视频头自身坐标进行定义。如图3所示,将其原点设定为光O,以此为准建立标准的X、Y、Z的三维坐标系,此坐标系中各个点在坐标中定为:(XC,YC,ZC)T。
在此基础上,为解决模型透视的问题,需建立图像平面的坐标体系,其原点同样选择O点,在此称为主点。但不同之处在于垂直平面X-Y坐标系与视频头方向相反。
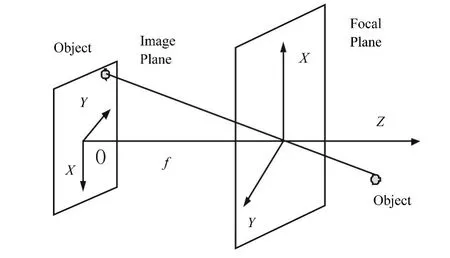
图3 视频头坐标、图像平面坐标对应图
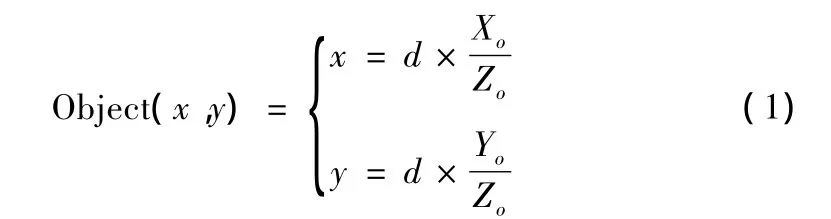
若定义其空间点在视频头坐标系中坐标位置为Object( XC,YC,ZC),平面坐标中的某点位置为Object(x,y);如果 d是图像平面点到光心O的距离,则投影模型如下:
其投影矩阵为:
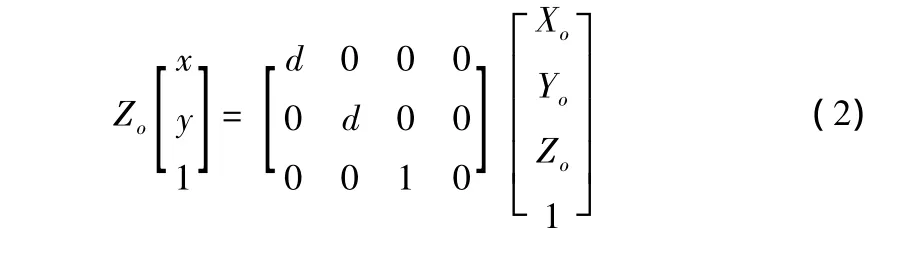
由于物体距离光心的距离d不会正好是焦距f点上,且其距离通常大于焦距点,为此需引入“虚拟平面”的概念:即在光轴Z上设置虚拟图像平面,对于平面图像呈光心对称,在此“虚拟平面”上设定两位坐标系,并且规定远点和光轴一致,摄像头的垂直平面与“虚拟平面”的垂直平面方向一致。
实际图像的点投射到视频头坐标上,再投射到“虚拟平面”上。
由于轴线的对称性,“虚拟平面”中的点坐标也同时满足之前描述的投影模型。
图4表示了物体在三不同坐标之间的关系。
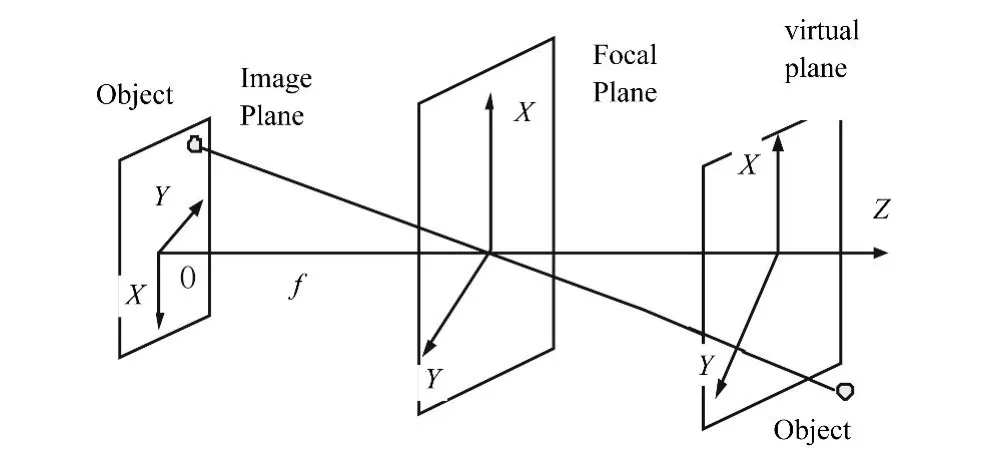
图4 视频头坐标系、图像坐标系、“虚拟坐标”关系图
2)自然坐标系与视频头坐标系的转换
由于移动机器人位置是移动的,因此需要一个能表达视频头相对于空间物体位置的基准坐标系,即可以确定环境中的物体几何尺寸、位置等各种空间物理参数,为此坐标系XW,YW,ZW的世界坐标系,利用向量平移和矩阵旋转,可以完成标定以上参数的功能,其影射关系如图5所示。
世界坐标系与视频头坐标系解析关系为:

图5 视频头坐标系与世界坐标系之间的解析关系
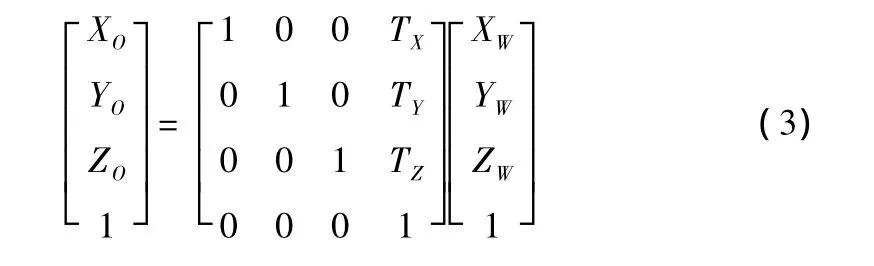
其中TX,TY,TZ为坐标各方向上的平移量。
3)图像平面中的坐标转换
3D图像重构中,图像平面坐标变换是关键一步。在实际情况中,光轴上的图像坐标系、像素坐标系所设定的坐标原点是不一致性;同时采集设备采集速度存在着不一致性,型号、功能参数相同的采集装置了采集速度也存在差异,其结果就是在变换过程中产生误差;在对图像中像素坐标点进行两轴分析时,也不能完全依照标准直角坐标轴进行矢量分析,这些问题增加了计算数据以及重构运算复杂性。
因此,建立像素点的坐标系和图像的坐标系的转换是很有必要的[4]3,[5]3,如图 3.4 所示。通过进行模数转换,即一系列的像素点(pixel)矩阵排列形成数组形式A×B(A行B列),其像素点的数表示的是图像点的亮度值,并依此来定义出像素坐标系。
如图6所示,图像坐标系是以(o)为坐标原点的直角坐标系,而像素坐标系则是以(o1)为坐标原点,其标定非均匀分布,因此二坐标系角度非直角,呈现出为一个随机角度[7]。两坐标轴间位置关系如图3.4所示。为分析图像和像素的变换关系,设θ表示u,v两轴之间的夹角,像素点在x轴和y轴上的物理尺寸为Δx,Δy,其中(uo,vo)为光心O在像素坐标系中的位置,其矩阵关系为:
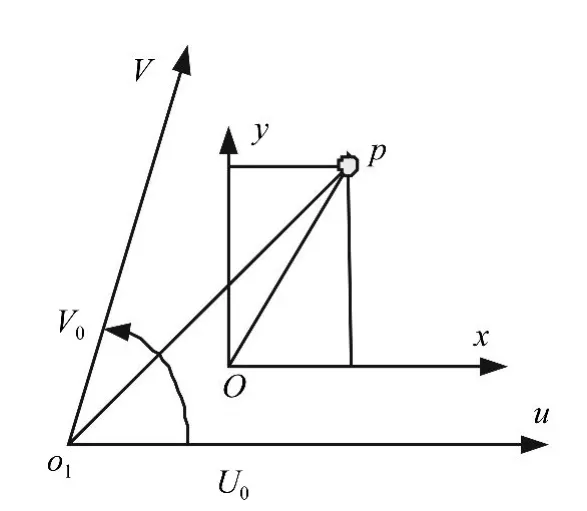
图6 图像坐标系、像素坐标系相互关系图
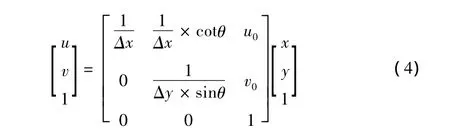
其中(x,y)是图像坐标系中以毫米为单位的位置。(u,v)是以个像素个数为单位的图像坐标系中的位置,得:
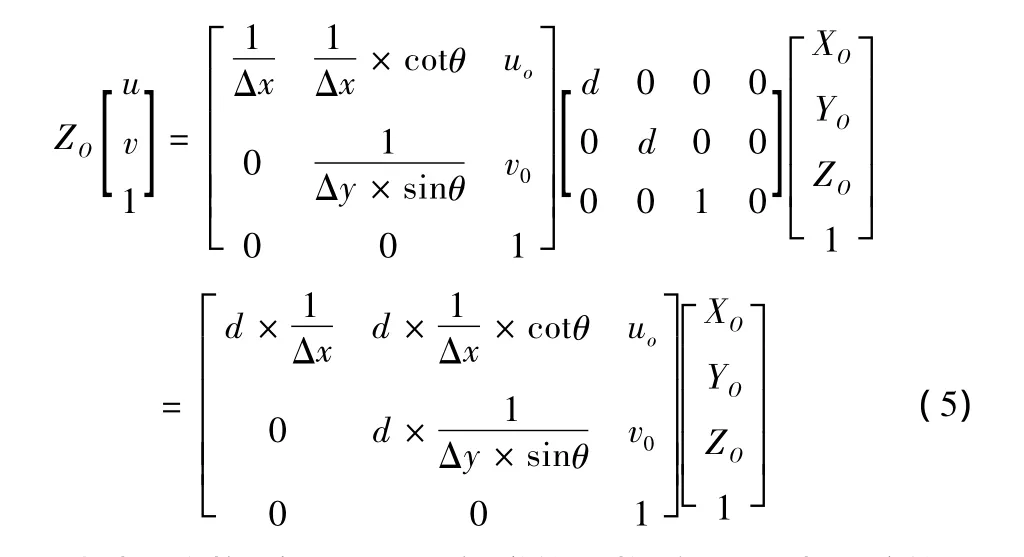
通过以上变换,实现了双目视觉的重构,能显示出环境的三维效果。在结合摄像头标定和双目矫正后,算法可以精确的重构出周边环境的三维重构数据。该数据可使用cvStereoRectify进行修正,利用cvReprojectImageTo3D函数来计算三维坐标;以Open-GL库中的FreeGlut函数将重构数据实时显示出来。
3 运动物体三维图像检测的实验验证
以上述推导为依据,在平面图像至三维图像的转换中,可利用三维实景中丰富的深度数据,进行目标辨识,实现动态目标的实时检测与跟踪[8-9]。
图像深度数据分析流程如图7所示。
1)实验参数的选定:
cvThreshold(depthIndexImage,pFrImg,64,255.0,CV_THRESH_BINARY);
设定阈值参数为64:
rect.height+rect.width)>=150&& (rect.height+rect.width)<=200

图7 运动物体的分析流程图
不同环境中的目标物体有所不同,可根据试验,获取描述该物体的最合适的参数,从而可以更精确的检测出目标物体的形状和运动状态。
2)实验检验
如图8(a)所示,在验证实验中,三维景深图中镜头前为一根手指移动时机器视觉的检测效果,摄像头跟踪了手指的运动轨迹。图8(b)图中一手臂在远处挥动,系统也识别出其为运动的物体,实现了跟踪。实验效果证明:以Kinect采集大量模拟数据为基础,结合OpenNI、OpenGL,能够较好地检测出运动物体的外形,并在3D环境中,捕捉到运动中的物体。经过改进简化的算法,图像的采集和检测速度,能满足移动机器人物体抓取的要求。

图8 3D图中物体的检测与跟踪
4 结束语
本文运用了点云算法和深度景深图原理,并根据应用对象特点,改进相应算法,构建了软硬件的平台,提高了检测速度,利用视频头替代人眼,将2D场景的数据重构成3D场景。实现了移动机器人双目系统的对象分割、物体识别与跟踪、判别决策等功能。目前这一平台已经在相关移动机器人中得以应用,取得了良好成绩。
[1]曹其新,张雷.轮式自主移动机器人[M].上海:上海交通大学出版社,2012.
[2]蔡叶菁.计算机视觉[J].中国包装工业,2002,11(5):143-145.
[3]张梅,文静华.浅谈计算机视觉与数字摄影测量[J].地理空间信息,2010,8(2):17-20.
[4]冯文刚.图像分析与理解的模型方法研究[D].合肥:合肥工业大学,2011.
[5]GREGORY ROGEZ,CARLOS ORRITE-URUNUELA,JESUS MARTINEZ-DEL-RINCON.A spatio-temporal 2D-models framework for human pose recovery in monocular sequences[J].Pattern Recognition,2008,41:2926-2944.
[6]张益贞,刘滔.Visual C++实现MPEG/JPEG编解码技术[M].北京:人民邮电出版社,2002.
[7]吴国斌,李斌,阎骥洲.Kinect人机交互开发实践[M].北京:人民邮电出版社,2012.
[8]C ANDERSON,PETERBURT,G VAN DER WAL.Change detection and tracking using Pyramid transformation techniques[J].In Proceedings of SPIE-Intelligent Robots and Computer Vision,1985,(579):72-78.
[9]OTSU N.A threshold selection method from gray-level histograms[J].IEEE.Transactions on Systrems,1979,9(1):62-66
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
哈尔滨工业大学学报(2022年5期)2022-04-19
导航定位学报(2022年2期)2022-04-11
摄影世界(2022年1期)2022-01-21
知识经济·中国直销(2018年12期)2018-12-29
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
商周刊(2017年6期)2017-08-22
制造技术与机床(2017年3期)2017-06-23
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
