
数字定位测深系统在复杂水域水下地形观测中的应用
2015-12-12 08:16黄春华
江苏水利 2015年8期
黄春华
(江苏省江都水利工程管理处,江苏扬州 225200)
0 引言
水下地形测量是测量水下陆地的起伏形态和地物的工作,其特点是测量内容多、精度要求高、显示内容详细[1]。水下地形测量的发展是和现代观测手段的不断完善紧密相关的。数字测深技术的发展为实时获取水下三维信息和实现水下自动化地形测绘提供了很好的条件。应用GPS 技术不但可以进行平面位置的精确定位,而且还可用来进行水面高程的实时确定。将测深仪与GPS 技术相结合,利用现有的导航测量软件和数据后处理软件组成数字定位测深及成图系统,在外业的水深测量、导航、数据采集过程中可以完全实现自动化观测,配合水深测量数据后处理软件将大大提高水深测量的工作效率和经济效益。江都水利枢纽工程位于江苏省扬州市江都区境内,枢纽四座抽水站下游连接新通扬运河及长江夹江,上游为高水河,是南水北调东线工程的源头,工程作用非常重要。由于长江夹江、输水河道及多座抽水站引河相互交织,水面形状纵横交错,使得工程上下游水面分布较为复杂,采用传统方法观测有较大困难,因此,迫切需要采用一种先进的方法对上、下游河道进行观测,以保证工程的安全运行。江苏省江都水利工程管理处采用GPS 与测深仪结合的数字定位测深系统进行观测,较好地解决了上述问题。
1 系统简介
数字定位测深系统由GPS 系统与超声波测深仪系统组合而成。
GPS 系统(Global Positioning System)是美国从20 世纪70年代开始研制的用于军事部门的卫星导航与定位系统。GPS 空间卫星由21 颗工作卫星和3 颗在轨备用卫星组成,24 颗卫星均匀分布在轨道内。卫星用无线电L 波段的两个载波向地面用户不间断地提供导航定位信号,定位信号中含有卫星位置的信息,地面接收站根据卫星的位置信息就可以解算出地面定位点坐标,如图1。
超声波测深仪系统,是采用超声波在不同距离上的回声时间差计算水深,20 kHz 以上的声波称为超声波(ultrasonic),因其频率高、抗干扰性好,被水声仪器广泛利用。超声波在水中传播速度是恒速,通过测量超声波往返水下地面的时间,从而得到水深,如图2。水深由以下公式得到:

式中:
h—船底到河底的垂直距离;
D—船舶吃水深度。
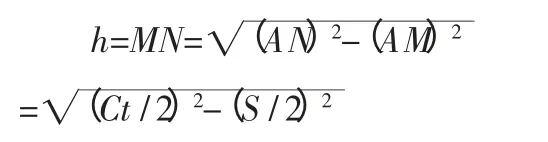
使S→0,则S/2→0
将超声波在水中的速度C 看成是常数(1500),换能器的基线S=0,通过测量超声波往返河底时间t,可计算得到水深h。
2 数字定位测深系统作业流程
利用GPS 系统与超声波测深仪系统进行水下地形图测绘的作业步骤主要包括以下几个方面[2]。
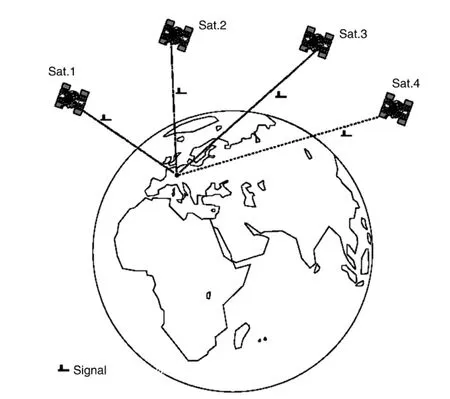
图1 GPS 定位原理图
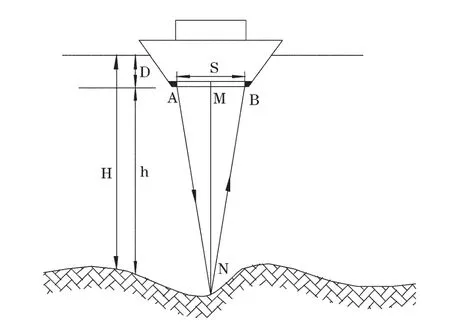
图2 测深示意图
2.1 基准站架设
将GPS 基准站架设在已知控制点上,设置参考站为RTK 模式,设置好基准点、已知坐标、天线及无线电台参数等,启动基准站。完成后即可得到发射信号的基准站。
2.2 设置流动站
在测船上安装好流动站GPS 天线、无线电接收天线等,启动流动站、测量手簿并开始RTK 测量。当跟踪的卫星超过4 颗并接收到无线差分电信号后,进行初始化,当解类型为“固定解”时便可精确定位。
2.3 检测
将计算机与流动站GPS 接收机、测深仪、显示器等连接好,启动导航软件和测深仪,打开设计好的测区文件及计划线,开始测量。导航信息窗口中显示出定位信息和水深信息,定位信息与测量手簿中的定位结果应一致。同时,将测深仪所测水深与实际水深比较可以得到各种修正参数。
2.4 水下地形施测
将修正参数输入船上水深测量系统,开动测量船,在计算机显示屏和外接显示器上显示出测船的示意图像、测船的实时动态点位及水深数据,即可控制测船按预设的航道或计划线航行。在施测过程中,软件将按测图要求等时间(或等距离)同步采集水下地形测点的平面位置与水深数据,并储存在文本文件中。
2.5 数据处理
野外施测结束后,在室内对原始数据进行处理,包括水深取样、综合改正输出、数据合并、格式转换等,按照数字成图软件要求的格式形成水下地形点数据文件,由南方CASS 软件完成展点、等深线生成、等深线注记等工作,保存图形,并以需要的比例输出图形,从而完成水下地形的测绘工作。
3 数字定位测深系统测量水下地形实例
2014年11月,我们在江都水利枢纽采用数字定位测深系统进行了水下地形图测量。江都水利枢纽上、下游引河河道的水域面积约为2.8 km2,由四座抽水站引河及输水河道交织而成,水面形状纵横交错,如图3阴影部分所示。
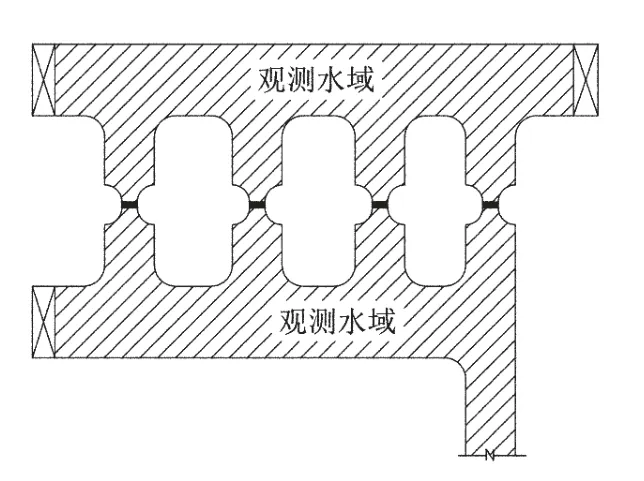
图3 江都水利枢纽观测水域
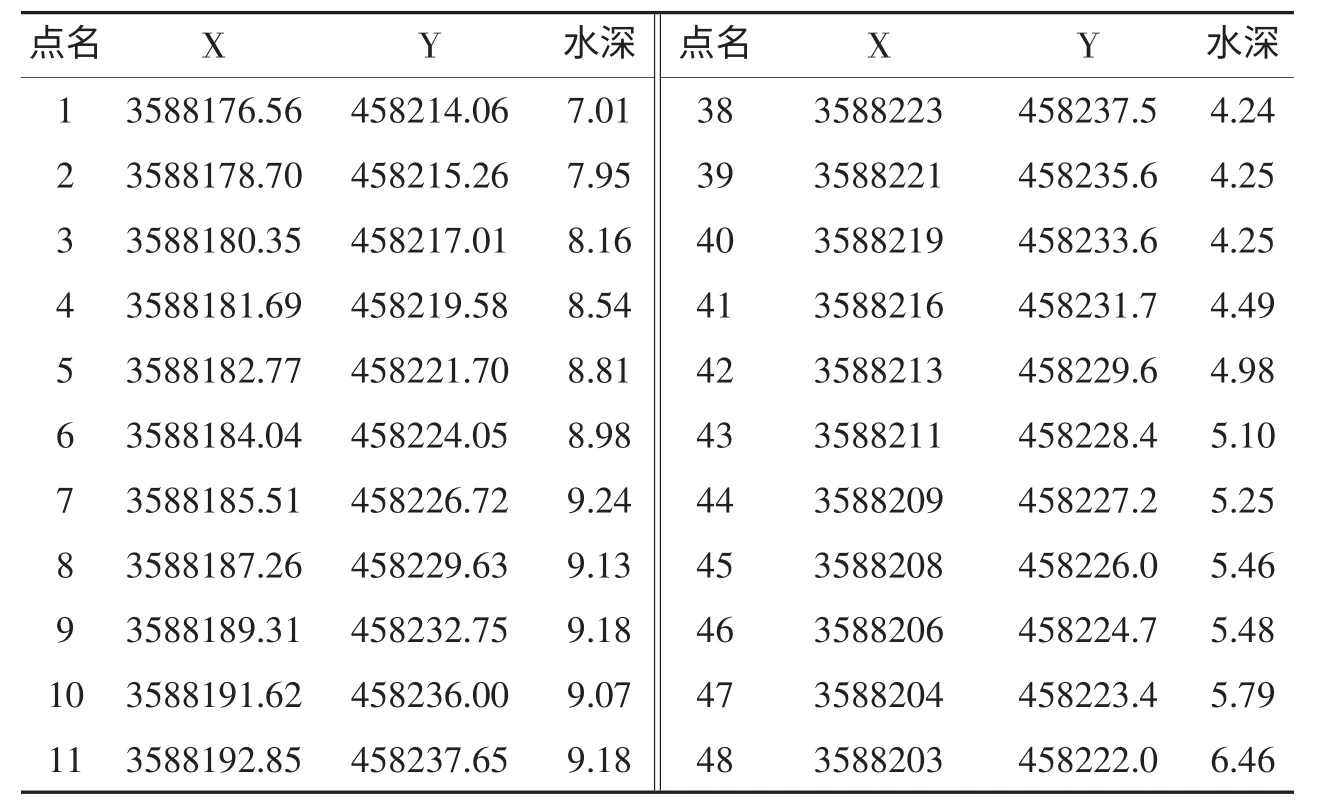
表1 实测部分点x、y、z 坐标
采用数字定位测深系统观测时,我们先在测区找到2 个已知坐标控制点,通过这两个控制点在测量水域的周围建立了一个平面及高程控制网。进行水下地形图测量前,先测量水面的高程。为满足测量误差的控制要求,在实际操作中可以将基准站设置在一个固定的已知点上,此点必须位置较高,且靠近测区的几何中心(我们将基准站架设在江都三站厂房顶上)。用2 个已知点求取转换参数并做检验点检验,坐标无误后便可进行水下地形图测量工作。测量作业开始后,小船应按照电脑上计划线以均衡的速度前进,由系统自动记录水下地形点的三维坐标(x、y、z),部分数据如表1 所示,用南方CASS2008 软件进行数字成图,可生成需要的水下地形图,如图4。
从实测的数据及图形可以看出,采用数字定位测深系统采集的水下点位数据精度较高,且因为数据量大,点位密集,系统点位的连续变化和均衡性较好,为CASS 软件的自动成图提供了极大的方便。
4 实际观测及数据处理注意问题
(1)控制网中的平面高程控制点设定应该注意GPS 测量对测站设置的要求,如:测站周围空间应视野开阔,高度角15°以上不允许存在影响GPS 信号接收的障碍物;同时要远离发射大功率电磁场的设备,如:大型变压器、高压线、信号塔等;测站应远离房屋、围墙、大树等障碍物,以减少多路径效应;测站应设置在位置相对固定、地面坚实、能够多次使用的地点,为方便以后观测,可尽量采用固定附着物,如建筑物的水泥墩、桩等。
(2)根据《江苏省水利工程观测规程》要求,合理确定地形点采集的密度。按照水下地形测量规范,测量船只应尽量测遍测区所有位置,船只航迹线间距应控制在10~15 m 之间。为满足CASS 软件成图要求,应每隔2 m 观测一点,以提高数据信息量。对于水下地形变化剧烈区域,测线、测点、间距的密度要相应增加,以便较真实地反映水下地形的变化情况。
(3)每次测量作业前或作业结束后,需将流动站移动至已知点上,校核测量数据与实际数据之间的误差,分析两者的符合程度,以确定本次测量数据的准确度。
(4)在水面有风浪的情况下,测量船只会前后左右摇动,导致GPS 接收器、换能器和测深仪不能保持在一条垂线上,从而影响定位精度。为有效减少风浪对测量精度的影响,必须清楚测船允许的晃动范围量。无风无流速的情况是水下地形测量的最佳时间,这时船只的摇晃幅度是最小的。测深仪在流速较大的情况下将会测出错误的水深,应该加以注意。
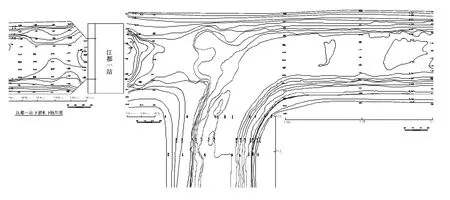
图4 实测地形图
(5)测船速度不能过快。测船的航速非常重要,航速过快,会造成点位坐标精度急剧下降,从而影响水下地形测绘的精度。
5 结语
数字定位测深系统在复杂水域水下地形测量上的应用,改变了传统的复杂水域水下地形测量作业模式,具有速度快、效率高、精度高等优点,节省了大量的人力物力。随着当前GPS 技术的飞速进步和应用的普及,其在水利工程测量中的应用越来越多,地位也越来越重要。
[1]佟玉娥.测深仪与GPS 集成技术在大平矿水库内地形测量中的应用[J].铁法科技,2013(11):18-22.
[2]黄勤,石银涛.GPS 和测深仪组合系统在水下地形测量中的应用[J].山东交通学院学报,2008(9).
[3]郑利民,李伟,陈伟伟,等.黄河下游河道工程观测研究[J].水利科技与经济,2008(12):969-971.
猜你喜欢
河北水利(2022年10期)2022-12-29
江苏安全生产(2022年8期)2022-11-01
海洋通报(2022年4期)2022-10-10
江苏安全生产(2022年2期)2022-04-19
江苏安全生产(2022年3期)2022-04-19
江苏安全生产(2022年12期)2022-02-12
浙江国土资源(2015年4期)2015-05-09
中国高新技术企业(2015年15期)2015-05-04
黑龙江工程学院学报(2015年2期)2015-04-19
机械制造与自动化(2014年1期)2014-03-01
