
众源GPS浮动车数据中城市道路中心线分级提取的栅格化方法
2015-12-11 05:58:36王振华胡翔云
测绘通报 2015年8期
王振华,胡翔云,单 杰,3
(1.武汉大学遥感信息工程学院,湖北武汉430079;2.北京洛斯达科技发展有限公司,北京100011;3.Civil Engineering,Purdue University,West Lafayette USA 47907)
一、引 言
数字道路信息的快速测定已经成为我国基础地理信息更新的一项重要任务[1]。但目前获取数字城市道路网的技术,如车载移动测量和基于航摄、遥感的外业测图等都存在成本高、更新周期较长的缺点。众源地理数据(crowdsourcing geospatial or geographic data)是指由大众采集并向大众提供的开放地理数据[2],GPS浮动车数据是其中一种。相对而言,从众源GPS浮动车数据中提取道路成本低、现势性好。
众源GPS浮动车数据的道路提取可以分为基于矢量化和基于栅格化两大类。现有的研究大部分是基于采样间隔短(一般为1 s)的数据[3-9],目前国内主要众源GPS浮动车数据来源一般是商用车辆,如出租车、公交车等,为了控制成本,采样时间间隔较长(一般为30~60 s),GPS轨迹会与实际道路不符,且众源GPS数据量大,基于每个矢量点提取计算量会很高;现有的基于栅格的方法只提取出了GPS数据密度高的道路[7],而众源GPS数据的分布往往很不均匀。因此,本文提出一种基于栅格化的“分级”提取道路中心线的方法,采用不同的策略分别提取GPS数据密度高和密度低的道路,而后将二者整合于一起并矢量化,从而得到更完整的道路网矢量地图。
二、栅格化
栅格化是找到矢量的GPS点与所要生成的栅格点的对应关系,目的是将临近的GPS点作为一个处理单元进行处理,可大大减少因众源GPS浮动车数据数据量大造成的过长处理时间。对应关系见式(1)。如果有一个及以上的GPS点落入到某个像素中,那么该像素值为0,否则为255,即可得到一副灰度影像。

式中,(x,y)为影像像素坐标;flon、flat分别是 GPS 点的经纬度;llon、rlon、blat、ulat分别为试验区域的最小经度值、最大经度值、最小纬度值、最大纬度值;w、h为试验区域的实际宽高;R为生成影像的分辨率。
分辨率高则会使GPS稀疏的地方栅格点距离太远,不利于低等级道路的提取且增加计算量,过低则GPS点密集的地方如转盘交叉处在影像上会模糊到一起,无法准确提取高等级道路,因此,分辨率设置应在高等级道路栅格点不模糊到一起的前提下,尽可能降低分辨率,缩小低等级道路点的距离。本文中所设定的分辨率是经试验得到,为2 m。图1是武汉市的试验区域经过栅格化后生成的影像。

图1 武汉地区浮动车GPS点灰度影像
三、“分级”提取道路中心线
从生成灰度影像可以直观看出,GPS点的分布很不均匀。因此首先根据密度将栅格点分为“高等级”和“低等级”,然后利用不同的方法分别进行处理得到道路中心线。
1.“高等级”道路中心线提取
形态学开运算的作用是平滑目标边缘,去掉毛刺和孤立点。因此首先用开运算将密度较低的道路栅格点去掉,剩余的就是高等级道路的栅格点,这样就实现了“分级”;之后利用基于距离变化的骨架提取方法[10]并去毛刺得到“高等级”道路的道路中心线。
2.“低等级”道路中心线提取
获得高等级道路中心线之后,基于其作缓冲区,将缓冲区与原灰度影像作减运算,得到“低等级”道路栅格点。“低等级”道路栅格点密度较低,有些甚至与噪声类似,因此首先要去除噪声。本文综合利用GPS点的密度和方向信息将噪声点去除。如果一个栅格点内及其附近的GPS点是在道路上,那么它们的GPS方位角应该比较近似或是因为反向关系相差180°。判断一个栅格点是否为噪声按照式(2)进行。闭运算具有填充空洞、连接临近物体的作用,因此去掉噪声之后利用闭运算使低等级道路点连续,然后提取低等级道路的中心线并去毛刺。

式中,Pi为目标栅格点;Pnoise为噪声点;σi为落入第i个栅格点及其8邻域内的GPS点的方位角标准差;Tσ为标准差阈值,试验设为15°;AMTi为落入第i个栅格点及其8邻域内GPS点的个数;Tn为个数的阈值,试验设为6。阈值设置目前采用试验方法获得,原则是既能有效去除噪声,又能尽量保留道路栅格点。
四、道路中心线连接
本文方法的连接思路为,根据临近性原则从提取的低等级道路端点出发,在其行进方向构建一个连接矩形窗口,在窗口内寻找最适合的道路点并连接。
首先将提取的高、低等级道路中心线叠合并叠加到原影像上,然后从每条低等级道路端点出发,根据其道路走向确定连接矩形窗口位置。图2是连接矩形的部分示意图,其中深色线条是原栅格点,箭头所指为提取出的道路中心线点,矩形为连接窗口。矩形窗口大小经试验定为50像素×50像素。然后找到在连接窗口内最适合低等级道路端点连接的道路中心线点。要解决两个问题:①如何从矩形窗口内备选连接点中找出最佳连接点;②确定其是否应该连接。最佳连接点的确定是基于:端点与连接点连接得到的线段经过的GPS点数越多,即经过的灰度影像上的栅格点数越多,其越有可能是最佳连接点。本文以比值作为确定每条备选路径成为最佳连接路径的可能性的度量。其中,Ni为备选点与端点的连线宽度为5个像素的缓冲区内的原灰度影像上的栅格点个数;Nbi为缓冲区大小,即其像素个数。选择比值最大的连接路径作为最佳连接路径,最佳连接路径的连接点即为最佳连接点,同时其值应大于0.5,否则视为“断头路”,不进行连接。最后利用道格拉斯-普克法[11]简化并进行矢量化得到最终的完整矢量道路网。
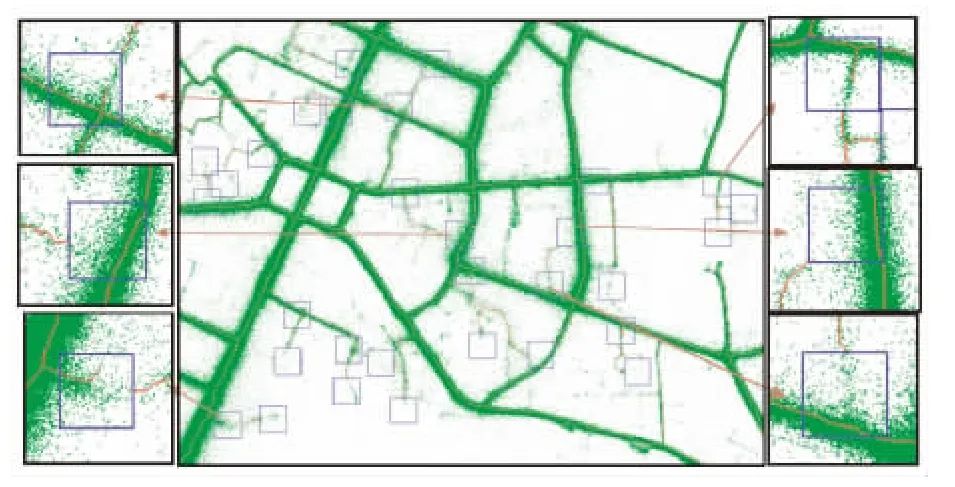
图2 连接矩形窗口
五、试验与分析
1.试验数据
本文采用的试验数据是湖北省武汉市2009年6月中旬连续6天的出租车GPS数据,试验区域包含27 811 907个GPS点,面积为675 km2。
2.试验结果及准确度分析
图3为试验区所提取的道路中心线,总长度为110 356 km,所用总时间32 min,所用计算机配置为Intel Core i5双核处理器,3.20 GHz主频。缓冲区分析是指自动建立点、线、面等实体周围一定宽度范围内的缓冲区多边形图层,将该图层与目标图层叠加并进行分析得到所需结果。本文采用2009年武汉市道路导航数据作为基准数据,用缓冲区分析的方法分析结果准确度。表1列出了不同缓冲区宽度得到的结果正确率。

图3 提取的武汉市部分区域道路网
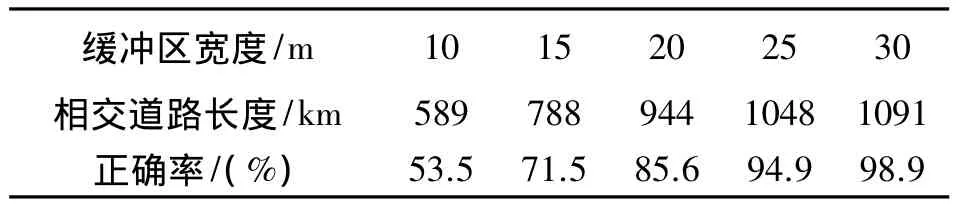
表1 所提取道路正确度
3.小区域试验
为了使目视效果更明显,同时选取了武汉市3个5 km×5 km的小区域作试验,并将结果叠加到高分辨率遥感影像中,以目视判读结果的准确度及完整度。试验结果如图4所示。
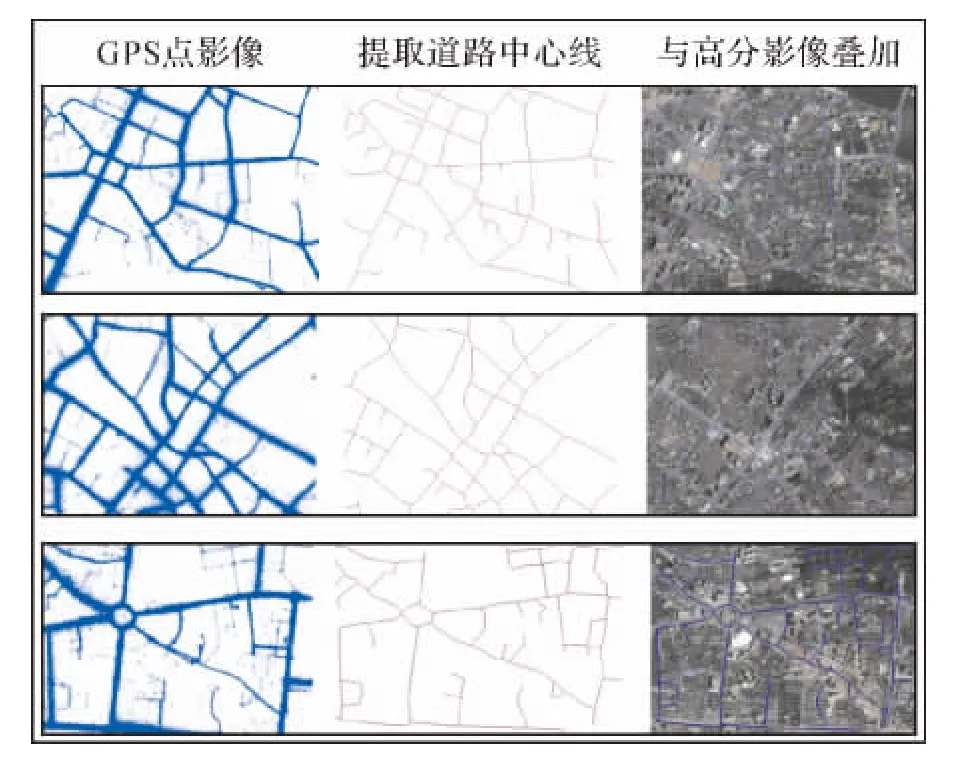
图4 小区域试验结果
4.试验分析
1)完整度。本文提出的“分级”处理思想,对于一些GPS密度较低的地方也适用,在连接性方面本方法能够将所提取出来的所有道路线段连在一起,保证了道路的连接完整性,因此本方法所提取的道路完整度较高。
2)时间效率。数据量大是众源GPS数据的特点之一,本文将矢量GPS点进行栅格化处理,本质上是将距离较近的GPS点聚类作为一个处理单元进行处理,而非基于每个GPS点,这样就能大大减少处理时间。
3)准确度。由试验结果的定量分析来看,本文方法所提取的道路中心线具有较高的准确度。
六、结束语
传统数字道路采集方法一般都具有成本高、更新周期相对较长的缺点,而众源GPS浮动车数据具有成本低、现势性好的优点,因此从其中提取道路网具有明显优势,但目前国内众源GPS数据一般都为商用数据,具有数据量大、采样频率低、分布不均匀的特点。基于此,本文提出了一种基于栅格化的“分级”处理众源GPS浮动车数据的方法以提取道路中心线,利用武汉市的出租车GPS数据进行试验,由结果可以看出本文提出的方法所提取的道路网完整度、准确率及算法效率都比较高。后继的研究要针对存在的相邻道路未分离、复杂交叉路口提取错误及方法参数过多且只能经试验得到等问题进行改进。
致谢:本文的GPS浮动车数据由武汉大学测绘遥感信息工程国家重点实验室3S集成与多媒体研究中心提供,导航路网数据由北京吉威时代软件技术有限公司提供,高分影像数据为谷歌影像,在此一并致谢。
[1]马力.基于整体优先性的遥感影像道路信息提取研究[D].武汉:武汉大学,2011.
[2]GILES J.Wikipedia Rival Calls in the Experts[J].Nature,2006,443(5):493.
[3]LI J,QIN Q,XIE Chao,et al.Integrated Use of Spatial and Semantic Relationships for Extracting Road Networks from Floating Car Data[J].International Journal of Applied Earth Observation and Geoinformation,2012(19):238-247.
[4]ZHANG L,THIEMANN F,SESTER M.Integration of GPS Traces with Road Map[C]∥Proceedings of the Workshop on Computational Transportation Science in Conjunction with ACM SIGSPATIAL.San Jose:[s.n.],2010.
[5]CAO L L,KRUMM J.From GPS Traces to a Routable Road Map[C]∥Proceeding of the 17th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems.New York:ACM,2009:3-12.
[6]EKPENYONG F,PALMER-BROWN D,BRIMICOMBE A.Extracting Road Information from Recorded GPS Data Using Snap-drift Neural Network[J].Neurocomputing,2009(73):24-36.
[7]DAVIES J,BERESFORD A,HOPPER A.Scalable,Distributed,Real-time Map Generation[J].IEEE Transactions on Pervasive Computing,2006,5(4):47-54.
[8]李宇光,李清泉.基于矢量道路栅格化的海量浮动车数据快速处理[J].公路交通科技,2010,27(3):136-141.
[9]ZHAO Y,LIU J,CHEN RQ,et al.A New Method of Road Network Updating Based on Floating Car Data[C]∥2011 IEEE International Geoscience and Remote Sensing Symposium.[S.l.]:IEEE,2011:1878-1881.
[10]GUNILLA B.Distance Transformations in Digital Images[J].Computer Vision,Graphics,and Image Processing,1986(34):344-371.
[11]DOUGLAS D H,PEUCKER T K.Algorithms for the Reduction of the Number of Points Required to Represent a Digitized Line or Its Caricature[J].The Canadian Cartographer,1973,10(2):112-122.
猜你喜欢
北京工业职业技术学院学报(2024年1期)2024-01-14 06:35:14
船舶标准化工程师(2023年2期)2023-09-30 22:51:45
河南城建学院学报(2020年3期)2020-08-14 01:08:38
制造技术与机床(2018年11期)2018-11-23 01:08:04
制造技术与机床(2017年9期)2017-11-27 02:13:48
汽车文摘(2016年6期)2016-12-07 00:23:38
项目管理技术(2015年3期)2015-04-23 08:44:29
电测与仪表(2015年3期)2015-04-09 11:37:22
交通建设与管理(2015年15期)2015-03-20 15:19:26
广东造船(2013年6期)2013-04-29 16:34:55
