
利用激光点云数据进行大比例尺地形图测绘的方法
2015-12-11 05:59:04吴晓章谢宏全谷风云刘春秀徐迎晨张念坤
测绘通报 2015年8期
吴晓章,谢宏全,谷风云,刘春秀,徐迎晨,张念坤
(淮海工学院测绘工程学院,江苏连云港222005)
一、引 言
经过十几年的发展,三维激光扫描技术目前已经广泛应用于多个领域,在测绘领域的应用也成为研究热点。国内将三维激光扫描技术应用于大比例尺地形测量的案例多为研究性应用。梅文胜等[1]详细论述实现精细地形测绘的方法及步骤;吕宝雄等[2]依托Riegl三维激光扫描仪在青海黄河拉西瓦水电站作了相关研究;胡奎等[3]针对煤矿沉陷区采用三维激光扫描技术成功绘制了精细地形图;彭维吉等[4]用Riegl VZ1000三维激光扫描成像系统进行了1∶2000地形图成图研究;崔剑凌[5]以西藏水利枢纽及配套灌区工程地形测量项目为例,完成了3种比例尺地形图测绘。本文以淮海工学院苍梧校区一叶湖周边为研究区域,采用徕卡C10三维激光扫描仪获取点云数据,重点研究1∶500地形图(地物)制图方法,最后与全站仪测图方法进行对比分析。
二、点云数据获取及预处理
1.测区概况
本次试验以测绘地物为主,选择校园内一叶湖的长方形区域,东西长约300 m,南北长约265 m,周围是校园道路,西部主要是人工草地(有稀疏树木),东部是人工湖,湖中有3个小岛(树木杂草繁多),道路周边有马路牙子、雨水篦子、窨井盖、花坛、路灯等地物。
2.获取点云数据方案设计
经过现场踏勘,依据仪器功能采用全站仪导线方式进行扫描,为获取满足1∶500地形图制图的精度要求,有效扫描距离控制在100 m以内,采用全景扫描方式,以高分辨率方式(点间隔5 cm/100 m)对测站周边进行扫描。依据已知控制点(编号为A、B、C、D)情况,在长方形的4个角布设4个闭合导线(如图1所示),采用全站仪加密4个控制点(编号是 01、02、03、04)。
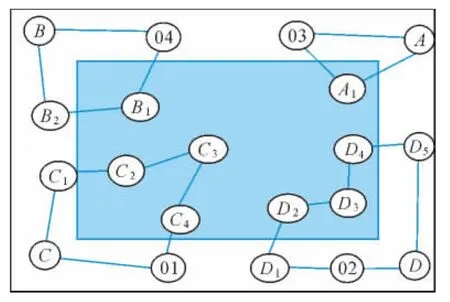
图1 闭合导线布设略图
3.野外点云数据的获取
依据获取点云数据设计方案,在校园控制点的基础上采用全站仪加密4个控制点(编号为01、02、03、04),4个闭合导线分别进行扫描。依据导线设计略图,结合现场实际情况,在地面上做临时导线控制点标志,并做好点编号。从导线已知点开始架设扫描仪,按照导线方式逐站进行扫描,具体方法见文献[6—7]。每个测站扫描时间大约在 0.5~1 h,数据保存在一个工程文件内。
4.点云数据预处理
将仪器中的数据文件传输到移动存储设备,数据文件约为23 GB,传输时间约为3 h。一次性导入Cyclone软件中失败,因此采用“Import ScanStation C10 Partial Project”命令分批导入,每次选择2~4个测站数据,全部数据导入Cyclone软件中大概需要3 h。
外业采集的测区原始数据在导入Cyclone软件后会根据坐标点自动生成拼接数据。由于Cyclone软件的一些默认设置的原因,拼接后的图像中显示的点云数量偏少,局部地物信息缺失严重,需在设置中改变“最大点云显示数”,设置后的点云可清晰看到局部地物信息。
依据测图范围,利用Cyclone软件功能,手动操作将测区范围以外的点云删除。为消除点云数据冗余,Cyclone软件中提供了归一化命令(unify clouds),选择 Reduce Cloud:Average Point Spacing,依据需要设置参数后,点击Unify按钮就可以完成点云归一化。
三、大比例尺地形图制作方法
选择AutoCAD 2013安装徕卡Cyclone软件的CloudWorx插件,制图软件采用 CASS7.0,地物图主要制作过程如下:
1.提取地物特征点与特征线要素
在AutoCAD 2013软件中导入预处理后的测区点云数据,选择俯视状态视图。由于软件的一些默认设置的原因,导入AutoCAD中的点云数量显示过少。需在工作空间中重生成视图,重新生成点云数据,使显示更加清晰。
利用AutoCAD 2013软件提供的样条曲线工具等功能命令手工绘出道路、房屋等地物的特征点与特征线要素(如图2所示)。

图2 提取地物特征线
2.地形图绘制与编辑
在AutoCAD 2013软件中手工提取地物特征点线后,以DXF的格式输出,然后在CASS7.0软件中打开文件,依据地物特征点线按照1∶500比例尺要求绘制地物符号。
由于点云数据导入至AutoCAD 2013中部分点云数据缺失,造成路灯、井盖等局部地物要素无法精确提取。在Cyclone软件中打开点云数据,提取所需地物点的平面坐标,在CASS7.0软件中通过输入坐标法确定特殊地物点的位置,再选择相应符号绘制,最后添加文字注记信息。
在CASS7.0软件可完成地形图的整饰,测区范围的成图效果如图3所示。
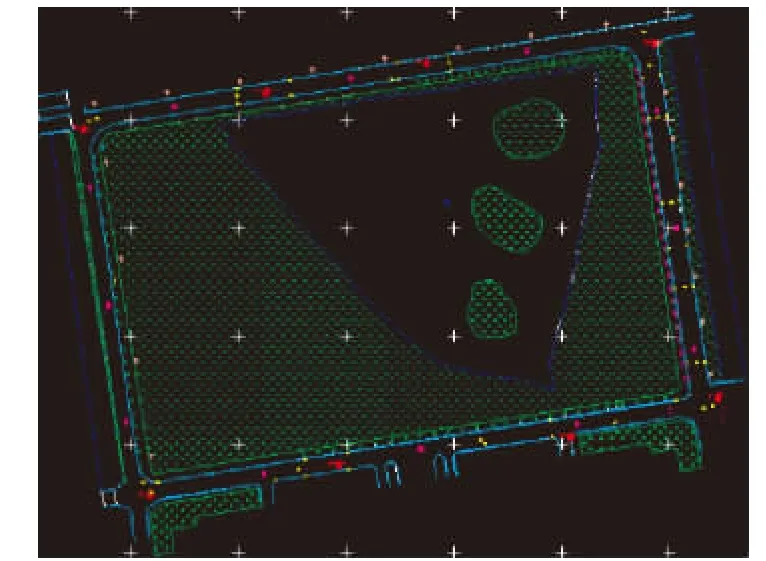
图3 测区1∶500地形图
四、与全站仪测图方法的对比分析
本文将基于三维激光点云数据的大比例尺地形图测绘方法与全站仪测图方法进行了全面对比,三维激光扫描技术应用的优势可总结为以下几个方面:
1)完整获取测区地形点云数据。利用地面三维激光扫描仪采用全景扫描和高分辨率方式获取测区内点云数据可以做到全覆盖,局部地物细节表达清晰(如雨水篦子、窨井盖等),在地形图绘制过程中对地物可以依据Cyclone中处理后的三维点云数据实时提取。而全站仪测图方法是用全站仪测定行树两端点的坐标,在CASS成图过程中进行等间距的符号绘制。另外,全站仪测图方法在数据采集过程中,对地物特征点采集的质量主要依靠测绘人员的专业水平,在跑点过程中有可能出现漏测、测量不规范等情况,如当时不能及时发现,需补测。
2)地物绘制的精度较高。将同一区域地形图试验成果与全站仪模式测量绘制的地形图进行叠加对比,在精度上存在一定差异,可以总结为两种情况:一是某些地物符合度较高,即两种方法外业数据采集精度上相差无几,如对道路拐角的测量;二是某些地物符合度较低,即两种方式精度上相差较大,如行树的绘制,基于三维点云数据可以精确提取每棵树的三维坐标,全站仪测图是测量行树两端精确位置在CASS软件中等间距绘制而成,行树两端位置几乎重合,但行树中间位置差异较大。经过全面对比分析,基于三维点云数据绘制的地形图地物总体精度上要高于全站仪测图。
3)复杂地物点云获取快捷,特征表达准确。地面三维激光扫描仪采用无接触式高速获取扫描物体表面的三维数据,直接实现各种复杂环境、不规则实体、危险区域等的三维数据的采集。如在测区范围内对3个孤岛获取的点云数据清晰准确,在CAD软件中可直接准确提取出孤岛的轮廓线。而全站仪测图方法是通过免棱镜模式对孤岛的轮廓线进行若干特征点的测量,在CASS软件中采用多段线方式绘制轮廓线,精确度相对较低。
4)仪器自动化程度高,野外人员绝对作业时间短。三维激光扫描仪在野外扫描过程中只需测量人员在测站点上进行对中、整平、定向及扫描方式的设置等一系列简单操作后,仪器将自动根据设置对测区进行扫描,对于测绘人员来讲,其绝对作业时间较短,操作简便。而全站仪测图模式在外业采集信息的过程中需要测量人员不间断选择碎步点来达到采集地物特征点的目的,作业时间较长,劳动强度较大。
地面三维激光扫描技术在大比例尺测图方面目前还处于研究试验阶段,还有一些问题亟待解决,主要体现在以下4个方面:
1)地面三维激光扫描仪与全站仪相比价格非常昂贵(150万元左右),目前国内企业普及程度较低,国外品牌仪器占有率高,国内品牌仪器还处于研究应用的起步阶段。全站仪具有价格绝对优势,普及程度非常高。
2)目前没有一套成熟的基于三维点云数据的专业绘图软件,只能通过将数据在各个软件之间转换并进行处理,同时国内地面三维激光扫描仪技术应用规范还在制定中。而全站仪从测量到验收有统一的技术规范,成果移交检核没有歧义。
3)本次试验研究在每个测站上自动采集时间大约1 h,野外数据采集相对作业时间较长。而全站仪则是对测区内地物特征点进行坐标测量,外业时间较短,工作效率较高。
4)由于扫描精度较高,导致点云数据量庞大(23 GB左右),数据从仪器导出和导入Cyclone软件时间较长(约3 h),并且在数据预处理过程中花费时间较多。全站仪采集的碎步点数据可以直接导入CASS软件,并依据草图绘制地形图,内业时间较短,操作简便。
五、结束语
本文选择以地物为主的长方形区域为研究对象,采用徕卡C10三维激光扫描仪获取点云数据,采用仪器随机处理软件Cyclone进行了点云数据的预处理,选择AutoCAD 2013安装CloudWorx插件,利用CASS软件重点研究1∶500地形图(地物)制图方法,最后与全站仪测图方法进行对比分析。通过试验研究,虽然可以绘制符合精度要求的大比例尺地形图,但是由于多种因素影响还不能广泛普及应用于测绘企业的大规模生产。地面三维激光扫描技术成熟应用于地形图精细绘制有许多问题有待进一步研究。
[1]梅文胜,周燕芳,周俊.基于地面三维激光扫描的精细地形测绘[J].测绘通报,2010(1):53-56.
[2]吕宝雄,居天力.三维激光扫描技术在水电大比例尺地形测量中的应用研究[J].西北水电,2011(1):14-16.
[3]胡奎,王丽英.三维激光扫描技术在精细地形图绘制中的应用[J].辽宁工程技术大学学报:自然科学版,2013,32(7):953-956.
[4]彭维吉,李孝雁.基于地面三维激光扫描技术的快速地形图测绘[J].测绘通报,2013(3):70-72.
[5]崔剑凌.地面三维激光扫描在难及区域地形测量中的应用[J].北京测绘,2014(2):85-87.
[6]张志娟,田继成,葛鲁勇,等.全站仪模式获取三维激光扫描点云数据方法研究[J].测绘通报,2014(9):87-89.
[7]谢宏全,侯坤.地面三维激光扫描技术与工程应用[M].武汉:武汉大学出版社,2013.
猜你喜欢
疯狂英语·新悦读(2023年9期)2023-12-02 17:36:34
北京测绘(2020年12期)2020-12-29 01:37:18
工程与建设(2019年3期)2019-10-10 01:40:18
童话世界(2018年17期)2018-07-30 01:52:02
电测与仪表(2016年9期)2016-04-12 00:29:52
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
现代营销·经营版(2015年3期)2015-04-20 06:46:58
中国卫生(2014年9期)2014-11-12 13:02:00
河南科技(2014年5期)2014-02-27 14:08:32
现代营销·经营版(2013年5期)2013-05-14 14:55:04
