
基于三次Cardinal样条曲线的航线平滑
2015-12-08 12:13缪永飞吴北苹吕健
电脑知识与技术 2015年25期
缪永飞 吴北苹 吕健
摘要:根据优化算法生成的航线由多个航线点顺序连接所形成的航段序列表示,其规划结果具有引导作用,但不具可飞性。该文引入三次Cardinal样条曲线对航线进行平滑,注重介绍了三次Cardinal样条曲线的基本原理,结合无人机航线规划的特点,提出了具体的航线平滑方法。
关键词:航线平滑;Cardinal样条曲线;张力系数
中图分类号:TP302 文献标识码:A 文章编号:1009-3044(2015)25-0160-01
1无人机航线规划的特点
随着信息化战争的发展,无人机将在未来一体化战争中扮演越来越重要的角色。航线规划是指根据无人机的任务目标规划满足约束条件的飞行轨迹,它要求无人机根据飞行环境在适当的时间内计算出最优或者次优的飞行轨迹,并能够回避敌方威胁,适时进行飞行轨迹的动态修正。它是无人机集群配合、战术规划和智能自主飞行的技术基礎。
航线生成往往采用智能算法,如遗传算法[1]、免疫算法、A*算法、粒子群算法[2]等,生成空间连续的航迹点的过程。航线生成是航线规划算法优劣、航线质量评估的基础。以往的航线平滑算法多利用B样条曲线等线性插值方法[3],这种方法的优点是算法复杂度底、计算简单,但也存在一、二阶不连续可导的不足。
2 三次Cardinal样条曲线的基本原理
Cardinal样条是插值分段三次曲线,并且每条曲线段的终点位置均指定切线,不过Cardinal样条不用给出终点的切线值。在Cardinal样条中,一个控制点的斜率可以由两个相邻控制点的坐标进行计算[4]。
Cardinal样条可由4个连续控制点完全确定,中间2个控制点是曲线段端点,其他两个点用于计算曲线段端点斜率。
3 结束语
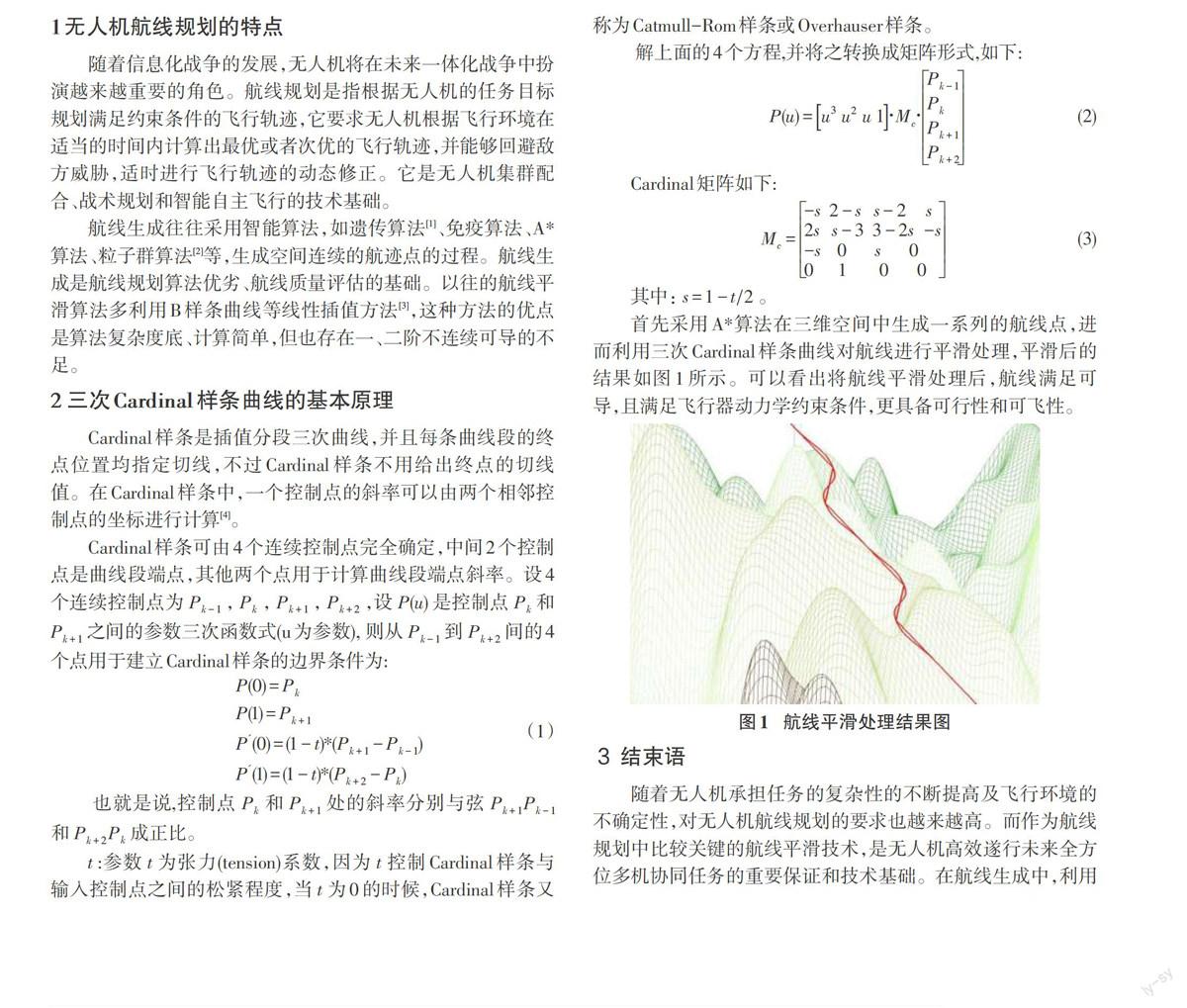
随着无人机承担任务的复杂性的不断提高及飞行环境的不确定性,对无人机航线规划的要求也越来越高。而作为航线规划中比较关键的航线平滑技术,是无人机高效遂行未来全方位多机协同任务的重要保证和技术基础。在航线生成中,利用
此算法进行平滑处理后可以使航线在三维空间内的一、二阶连续可导性得到较大的提高,航线规划更具有可实现性,也为进一步的航迹分析和动作评估打下基础。但值得注意的是,未来战场瞬息万变,无人机航线规划在实时规划、智能自主规划等方面仍然存在进一步挑战,无人机要在扑朔迷离的未来战场实现其高度的战争价值,仍然任重而道远。
参考文献:
[1] 牛治永,李锦军.无人机三维航迹规划算法研究[J].自动化技术与应用,2013(11):1-5.
[2] 刘洋.无人机航线规划算法研究,SCIENCE & TECHNOLOGY INFORMATION,2013(7):192-192.
[3] 杨雪,王端民.无人机自主飞行航线规划研究[J].计算机工程,2012(5):192-195.
[4] 胡中华,赵敏.无人机航迹规划技术研究及发展趋势[J].航空电子技术,2009(2):24-29.
猜你喜欢
安徽师范大学学报(自然科学版)(2022年3期)2022-07-14
数学物理学报(2022年2期)2022-04-26
青年歌声(2019年12期)2019-12-17
中学生数理化·教与学(2019年8期)2019-09-18
制造技术与机床(2017年7期)2018-01-19
北京航空航天大学学报(2017年7期)2017-11-24
软件(2017年6期)2017-09-23
计算机测量与控制(2017年6期)2017-07-01
数学物理学报(2017年1期)2017-06-05
北京航空航天大学学报(2016年6期)2016-11-16
