基于Arduino的体外授精取卵装置系统的研发*
2015-12-08 07:18陈向君黄苏南肖明波
电子技术应用 2015年5期
陈向君,黄苏南,肖明波
(1.杭州电子科技大学 通信工程学院,浙江 杭州310018;2.杭州电子科技大学 生命信息与仪器工程学院,浙江 杭州310018)
基于Arduino的体外授精取卵装置系统的研发*
陈向君1,黄苏南2,肖明波1
(1.杭州电子科技大学 通信工程学院,浙江 杭州310018;2.杭州电子科技大学 生命信息与仪器工程学院,浙江 杭州310018)
在整个辅助生殖过程中,取卵装置是一个关键设备。针对我国取卵装置主要依赖价格较昂贵、体积较大的进口装置这一现状,研究开发了一套基于 Arduino的体外授精取卵装置系统,介绍了装置的主控制系统及取卵负压装置、恒温试管架等模块的系统设计,给出了基于PID控制算法的系统控制策略及系统的性能测试。实验结果表明,该装置具有可靠性高、容易控制、成本低廉等优点,具有较好的发展空间和市场前景。
Arduino;取卵负压装置;恒温试管架;PID控制算法
0 引言
据 2012年我国不孕不育调查显示[1],国内不孕症者占已婚夫妇人数的 12.5%,发病率呈上升趋势。目前,国内已有100余家医疗机构开展了人类辅助生殖技术的应用与研究工作。在整个辅助生殖过程中,取卵负压装置和试管架是关键设备,国内大多数医院采用澳大利亚COOK公司生产的IVF取卵针、负压泵和恒温试管架等组成的设备系统。这套COOK设备系统由于开发早并且相对成熟已长期占据国际和国内市场,但其采用机械装置实现负压控制,使得成本较高、价格昂贵、体积大,也容易出故障。近年来,国内多个机构也对取卵设备进行了相关研究,如毕宜法发明设计的一种取卵器[2],可利用负压吸引器产生负压直接将泡液吸入试管中,但设备采用的是单腔取卵针,其针管直径较粗,对卵巢创伤大,且卵母细胞收集率较低;楼伟匡等人研究了一种无菌取卵专用穿刺针及无菌取卵针装置[3],该装置采用了双腔取卵针,提高了卵母细胞的收集率,而其负压吸引器采用的还是传统的机械控制方法,成本较高且可靠性低。同时,国内还有诸多相关专利[4-5],但都侧重于对取卵针的研究,采用的也都是机械负压泵,对整套取卵装置并没有进行系统的研究与设计,尤其是对负压泵和恒温试管架这两个关键单元的控制没有具体涉及。
针对现有产品的缺点,本文设计开发出了一套基于Arduino的体外授精取卵装置系统,介绍了取卵系统的
总体设计和系统功能实现,给出了负压泵和恒温试管架的具体控制算法,系统具有体积小、运行稳定可靠等优点,且其成本低、操作简单,拥有较大的市场空间。
1 取卵控制系统设计及操作
本系统控制器采用使用广泛的Arduino Uno开发板[6]。该控制板功耗低、功能强大,其主控制芯片为ATmega328,可提供14路数字I/O接口(其中6路作为PWM输出)和6路模拟输入接口,完全满足系统设计需求。图1所示为取卵装置控制系统的示意框图,系统主要由恒温控制和负压控制两大部分组成。
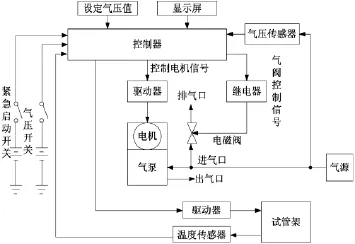
图1 取卵装置系统示意框图
恒温闭环控制中,采用高精度 PT100热电偶采集试管架内的实时温度,通过SBWZ热电偶温度变送器将信号变换成与被测温度成线性的0 V~5 V的电压信号,接入到 Arduino控制板的模拟输入端,控制单元通过相应转换及系统设定的模糊PID算法计算得出对应的控制量,控制数字端的PWM输出。该信号通过场效应管和整流二极管组成的驱动电路控制置于恒温试管架内的硅胶加热片,使其达到恒温控制效果。
负压闭环控制中,先设定期望气压值,当 Arduino控制器检测到气压开关被按下时,产生一个高电平触发继电器使其打开电磁阀,让气管接通。同时,连接在气路中型号为KP42V-02-F1的气压传感器产生1 V~5 V的模拟电压信号送到控制板的模拟输入端,通过传感器输出特性将电压信号转换为真实气压值,微控制器根据PID算法计算得出对应的PWM控制输出信号。该信号通过场效应管和整流二极管组成的驱动电路驱动型号为VBH2005的微型气泵工作产生负压,最终达到气压的稳定输出。抽气过程中,可根据患者需要随时改变抽取气压大小,若遇软组织堵塞等紧急情况,控制器可输出最大的PWM控制信号,驱动气泵产生最大抽力,从而避免气管堵塞。当抽取过程结束时,断开气压开关,控制器产生低电平触发继电器关闭电磁阀,从而使系统不会导致卵子和子宫血倒流,进而避免了感染病毒的可能性。
取卵负压装置的连接如图2所示。装置主要包括:1双腔取卵针、2软管连接器、3抽取连接管、4注射管线、5注射针、6细真空管线、7负压连接头、9粗真空管线、10气泵连接装置、11试管收集器。其中10口连接到微型气泵的抽气口,8口、9口分别连接到直动式电磁阀的进气口和出气口,试管收集器放置在恒温试管架中以保证细胞的成活率。

图2 取卵负压装置连接图
2 系统PID控制原理
PID控制[7]是自动控制发展历程中生命力最强的基本控制方式,其根据系统的误差,利用误差的比例、积分、微分三个环节的不同组合计算出控制量,在数字系统中,主要有如下两种PID控制器的数字形式:

其中,式(1)、式(2)分别为 PID控制的位置式和增量式,u(k)为控制器输出量,e(k)=r(k)-y(k)为设定值r(k)与被控对象实际测量值 y(k)构成的控制偏差信号,KP、KI和KD分别为比例、积分和微分系数。由于增量式具有抗积分饱和功能,且输出表示为Δu(k)形式,可以直接被某些控制单元使用,所以实际应用中多采用PID的增量形式。
当对具有非线性、大滞后、时变的复杂系统进行控制时,常规 PID控制器往往存在超调大、调节时间长、参数固定等问题,由此本文采用自整定模糊 PID[8]实现在线整定参数功能,从而保证控制效果。图3所示为自整定模糊PID控制的一种实现方法。先将误差e和误差变化率 ec变化范围及 PID参数的自调整量 ΔKP、ΔKI和ΔKD均模糊化到模糊子集,得到控制规则表,在系统运行中控制器以误差和误差变化率作为输入,通过控制规则表进行模糊化和模糊推理,然后用加权平均法进行去模糊化,得出PID参数的自调整量,加上各参数的初始值获得最终三个控制系数,最后采用增量式对被控对象进行控制。
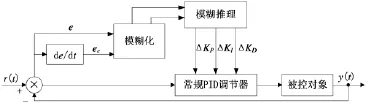
图3 自整定模糊PID控制系统结构图
3 系统软件控制流程
本控制系统程序采用模块化设计,主要包括系统的主程序、初始化模块、采样模块、温度控制模块、气压控制模块、液晶显示模块、模糊PID控制算法模块等。图4、图5分别为温度和气压控制模块的程序流程图。其中温度控制模块采用模糊PID与常规PID相结合的算法,且在误差较大时采用全功率加热或零输出以便快速达到设定值;气压控制模块起始阶段采用线性递增方式达到设定值,可以减轻因突然高负压对患者造成的疼痛感。

图4 温度控制模块流程图

图5 气压控制模块流程图
4 系统性能测试
为验证取卵装置在实际应用中的温控效果,恒温试管架的控制温度设定为36.9℃,以保证抽取出卵母细胞的成活率,采样频率设为 5 s,同时在控制过程中间加入风扇作用,用以模拟外界干扰因素。由Arduino IDE调试软件的串口监视器[9]获得的温度变化曲线如图6、图7所示。图6为系统从起始到结束的温度控制曲线图,图7为系统在设定值处的温度稳定波动图。

图6 温度控制变化曲线

图7 设定值处温度波动图
从图6中可以看出,试管架温度平稳上升且时间快,超调量较小,温度控制系统的控制效果明显,具有良好的动态品质。从图7中可以明显看出在控制系统稳定工作后,以设定值36.9℃为标准,温度的浮动范围为±0.1℃,具有较高的控制精度,为增加细胞的存活率提供了保障。如图7曲线中后段所示,当外界存在干扰时,温度先偏离设定温度值,而后又逐渐向设定温度值靠拢,最终达到原先的稳定状态,体现了本控制系统的稳定性及较强的抗干扰能力,满足了项目的控制需求。
鉴于装置还处在试验阶段,气压控制实验以水为抽取对象。图8给出了当设定气压值为25mmHg、采样间隔为200 ms时的负压动态曲线图。从图中可以看出,装置负压值从系统工作后缓慢增加到设定值,而后趋于动态平稳,其气压波动范围为±5mmHg,有较强的稳定性,满足负压精度范围。同样,如图9所示,当设定气压值为105mmHg时,动态负压控制效果较好。经实验测试,当系统以最大功率工作(即按下紧急开关时),测得最大负压值可达580mmHg,基本达到了最初的设计目标。
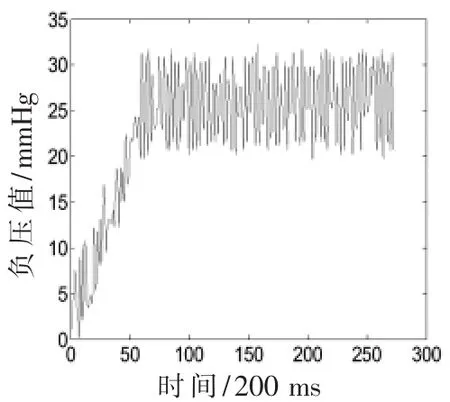
图8 负压控制变化曲线
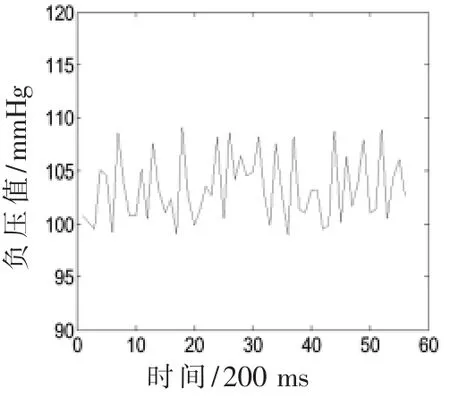
图9 最大负压控制曲线
5 总结
本装置系统在基于Arduino单片机和模糊PID算法的基础上,实现了对恒温试管架温度的精确控制和装置内气压的阻尼控制,并实现了对气压的准确切换,避免了抽取出的卵子和子宫血的倒流问题,同时采用了双腔取卵针,提高了卵母细胞的收集率。系统具有低功耗、操作简单、成本低、精度较高、故障发生率低等优点,在辅助生殖医疗方面具有较好的经济效益和较大的市场空间。在以后的工作中,该系统还有待进一步完善,即对系统控制算法进行智能优化、扩展设备功能等,以便提高本装置的自适应性和实用性。
[1]新华网.中国人口协会调查显示:不孕不育患者已超过4000万[EB/OL].http://finance.chinanews.com/jk/2012/12-02/4375106.shtml,2012-12-02.
[2]毕宜法.一种取卵装置[P].中国专利,200820026603.9. 2009-04-22.[3]楼伟,匡延平.一种无菌取卵专用穿刺针及无菌取卵针装置[P].中国专利,201020570629.7.2011-04-27.
[4]魏毓君.简易型单腔取卵器[P].中国专利,201120085875.8. 2011-11-02.
[5]肖红卫,乔宪凤.快速抽取卵母细胞装置[P].中国专利,201120314165.8.2012-07-11.
[6]蔡睿妍.Arduino的原理及应用[J].电子设计工程,2012,16:155-157.
[7]金奇,邓志杰.PID控制原理及参数整定方法[J].重庆工学院学报(自然科学版),2008(5):91-94.
[8]黄卫华,方康玲.模糊控制系统及应用[M].北京:电子工业出版社,2012.
[9]程晨.Arduino开发实战指南[M].北京:机械工业出版社,2012.
Research of IVF oocyte retrieval device system based on Arduino
Chen Xiangjun1,Huang Sunan2,Xiao Mingbo1
(1.School of Communication Engineering,Hangzhou Dianzi University,Hangzhou 310018,China;2.College of Life Information Science&Instrument Engineering,Hangzhou Dianzi University,Hangzhou 310018,China)
In the assisted reproduction system,oocyte retrieval device is a key equipment.Considering current oocyte retrieval device mainly depends on imports,which is expensive and prone to failure,the research develops an oocyte retrieval device system based on Arduino for IVF.The design of the main control system,oocyte retrieval vacuum control system and thermostatic test tube rack are described,and the system control strategy based on PID algorithm and the performance of the test system are presented. The experimental results show that the device is highly reliable,convenient to control and cheap to produce,demonstrating further development space and market prospects.
Arduino;oocyte retrieval vacuum device;thermostatic test tube rack;PID control algorithm
R318
A
0258-7998(2015)05-0070-03
10.16157/j.issn.0258-7998.2015.05.015
2015-01-20)
陈向君(1991-),通信作者,男,硕士研究生,主要研究方向:嵌入式系统设计、信号与信息处理,E-mail:chen1991xiangjun@163.com。
黄苏南(1963-),男,博士,教授,主要研究方向:医疗仪器研制、自适应控制、故障诊断等。
肖明波(1971-),男,博士,教授,主要研究方向:过程控制与优化、无线通信等。
国家自然科学基金(30900328);浙江省重点实验室建设基金(GK130907208001);浙江省新苗人才计划资助项目(2014R407056)
猜你喜欢
湖北农机化(2021年7期)2021-12-07
幼儿画刊(2021年5期)2021-12-02
河北农机(2020年10期)2020-12-14
河北省科学院学报(2020年4期)2020-03-19
模具制造(2019年4期)2019-06-24
大陆桥视野·下(2017年11期)2017-10-31
电子制作(2017年24期)2017-02-02
自动化仪表(2015年5期)2015-06-15
汽车维修与保养(2015年6期)2015-04-17
质量技术监督研究(2015年1期)2015-04-09