
一种抑制无刷直流电机转矩脉动的新方法
2015-12-08 05:26谢少华瞿遂春
湖南工业大学学报 2015年5期
谢少华,瞿遂春
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
一种抑制无刷直流电机转矩脉动的新方法
谢少华,瞿遂春
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
对无刷直流电机转矩脉动产生的原因进行全面分析,提出增加前级直流变换器抑制转矩脉动的新方法,使用buck直流变换器,通过调整逆变器的母线电压来抑制转矩脉动,在MATLAB/Simulink环境下基于该方法搭建无刷直流电机仿真模型,并对系统进行仿真分析。仿真结果表明,该方法能够有效抑制无刷直流电机转矩脉动。
无刷直流电机; buck;转矩脉动;系统仿真
0 引言
无刷直流电机(brushless direct current motor,BLDC)一般采用高性能的永磁体励磁,具有转高的功率重量比、结构简单和调速性能优越等特点,伴随着永磁新材料与电力电子技术特别是大功率开关器件的不断发展,无刷直流电机的应用领域不断拓展。当前,无刷直流电机调速方式主要是通过脉宽调制技术直接控制逆变器上的开关管来实现电机的调速。但是,基于该方法的调速方式的无刷直流电机存在转矩脉动大的问题,转矩脉动会导致速度波动,电机振动,降低电机运行品质,极大制约了BLDC在高精度与高稳定系统中的应用。
文献[1]对无刷直流电机转矩脉动原因进行了分析,主要包括电磁转矩产生原理导致的转矩脉动、电流换向转矩脉动和齿槽转矩脉动。文献[2]针对目前抑制BLDC的转矩脉动主要方法进行总结,主要包括转矩直接控制、重叠换相法、最佳开通角法、PWM(plus width modulation)斩波法、电流预测控制法、自适应控制的转矩估算器、卡尔曼滤波法和神经网络控制。文献[3]提出滑模观测器控制方法,该方法能够通过滑模观测对补偿电流进行有效控制,实现对电机转矩脉动的抑制。但是,以上方法都是基于改进三相桥臂开关管的控制方式或采用先进的控制策略进行闭环控制,无可避免地存在过补偿或欠补偿的问题,在实际运用中,降低了转矩脉动的抑制效果,难以达到比较理想的控制效果。
本文从功率变换器的角度,提出基于buck电路的抑制无刷直流电机转矩脉动的方法。该方法通过在前级加buck电路实现调压,保持母线电压稳定,从而实现对无刷直流电机转矩脉动的抑制。最后,进行了仿真分析,仿真结果表明,新的方法能够有效地抑制电机的转矩脉动。
1 传统功率变换器的BLDC转矩脉动分析
1.1 运行原理
BLDC的功率变换器主电路结构如图1所示。BLDC一般具有梯形波的反电动势,控制方式采用常见的三相六状态的导通方式,当反电动势波形为理想梯形波时,为了产生恒定的电磁转矩,相电流必须是120°电角度的理想方波,并且两者的相位必须严格对应,在传统的控制电路中,以PWM调制技术直接控制逆变桥上的6个功率开关管,从而实现电机的换相和调压功能。

图1 功率变换电路Fig. 1 Power converter circuit
电磁转矩表达式为

式中:T为电动机的电磁转矩;
iA, iB, iC为定子相绕组电流,A;
eA, eB, eC为定子相绕组电动势,V。
1.2 非换相期间
由文献[4]对4种基本PWM调制分析可知,当非导通相端电压高于直流母线电压或低于0 V时,该非导通相就会有续流现象产生,同时,需要指出的是,不同的PWM调制方式其产生续流区间是有所不同的,对于无刷直流电机的电磁转矩而言,这个续流是有害的,它的存在,会导致换相期间的电磁转矩减小,使非换相期间电磁转矩产生脉动。表1为4种调制方式非导通相续流产生相区的对比表。当PWM调制方式变化时,转矩脉动区间也随之变化。转矩脉动随调制方式的变化规律如表1所示,从变化规律可以看出,不论何种PWM控制方式,只要逆变器采用PWM控制方式,则在非换相期间,截止相的续流作用始终存在,此续流将会参与到总的电磁转矩的合成中去,续流的存在,破坏了原有两相电流合成的电磁转矩的平衡,进而引起了电机的电磁转矩脉动。

表1 4种调制方式非导通续流产生相区间对比Table 1 The comparison of the generation of the non conduction continuous flow in the four modulation modes
1.3 换相期间
根据R. Carlson等在经典文献[5]所做出的定量分析,在只考虑电感的情况下可知,因换相引起的转矩波动与E/U的比值有关,由文献[6]可以得到如下结论:
当U≥4E时,可以通过调节逆变桥上开关管的PWM占空比来消除转矩脉动,同时,PWM调制波的占空比和换相转矩脉动的振幅存在正比例关系。然而,对于某一无刷直流电机控制系统而言,母线为定值,反电动势系数也是固定值,要满足U≥4E条件,电机只有在低速区段才能满足,在实际的运用中,就只有很窄的一段低速范围才能满足条件,这样,对于逆变桥上的开关管工作在PWM调制方式下的无刷直流电机,就不能在较宽的调速范围内有效地减小换相转矩脉动。
当U<4E时,此时即电机工作在中高速区段,则不管PWM信号如何变化,换相电磁转矩脉动的方向始终与输出的电磁转矩相反,即在整个换相期间内,转矩脉动对平均电磁转矩是起到减小的作用,无法通过逆变桥上开关管的PWM调制方式来改善换相转矩脉动。
2 新型功率变换器的BLDC转矩脉动分析
新型控制方法是在逆变器前级加buck电路,将逆变器的调压功能分离出来,逆变器只负责换相,调压由前级的直流变换器来实现。新的控制电路的主电路结构如图2所示,通过控制buck电路的开关管的占空比大小,来实现连续调节直流母线电压U,具体关系为

式中:ton为开关管的通态的时间;
toff为开关管处于断态的时间;
T为开关周期;
E为电源电压。

图2 基于buck功率变换电路Fig. 2 Buck-based power converter
后级三相逆变器上的开关管采用恒通的工作方式,即每一状态区间内处于开通的2个开关管不进行PWM调制,各开关管的导通顺序为:T1, T2;T2, T3;T3, T4;T4, T5;T5, T6;T6, T1。一个周期有6种导通状态,导通的周期均为120°电角度。
2.1 非换相期间
在新型的控制方式下,由于三相逆变器工作在恒通的方式下,逆变器不需要工作在PWM调制下,截止相在非换相期间没有续流流过,在非换相期间,电机的合成磁场仅由导通的两相电流合成决定,从根本上杜绝了截止相续流对总的合成电磁转矩的影响,进而能够抑制BLDC在非换相期间的转矩脉动。
2.2 换相期间
由文献[7-8]可知,在新的控制方式下,电机在整个转速范围内均有U≤4E,此时根据上文的分析可知,换相转矩脉动始终为负,因而在整个换相期间内的平均电磁转矩减小,同时,当逆变器上的开关管采用PWM调制,开关管的PWM信号有效电平为1时的电磁转矩脉动比开关管PWM有效电平为0时的小。因此,为了减小转矩脉动,当U≤4时E,逆变器的开关管应工作在恒通的方式。总结上述的情况可知,逆变器上开关管在恒通工作方式下能够获得比逆变器上开关管在PWM调制下更小的换相转矩脉动。
3 基于新型功率变换器的BLDC系统仿真与结果分析
3.1 新型功率变换器的BLDC在Simulink下建模仿真
在Matlab/Simulink环境下对本文提出的抑制脉动转矩的方法进行仿真建模,如图3所示。仿真系统主要由无刷直流电机模块,逆变桥模块,换相逻辑控制模块等组成。
电机模型采用永磁同步电机,将反电动势波形设置为120°,即为无刷直流电机,电路参数:C为600F,L为20 mH。电机参数:额定电压为450 V,电机极对数为5,额度转速为2 500 r/min,相绕组电阻为2.8,电感为8 mH,通过输出的位置信号来控制三相绕组的导通顺序,前级的buck电路实现电机的调压调速。调节buck电路中IGBT的开关频率来实现对电机的调压调速。
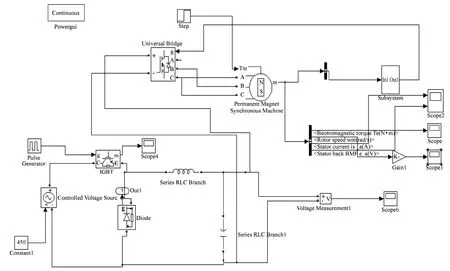
图3 基于buck的Simulink模型图Fig. 3 The Simulink model based on buck
3.2 换向逻辑控制模块
无刷直流电机使用三路霍尔位置传感器,感应转子位置,每经过60电角度霍尔状态变化一次,控制逻辑根据三路霍尔信号,判断出转子位置,然后决定三相桥式开关管的开关状态。换相逻辑模块在Simulink中的模型如图4所示,霍尔元件和与门极触发信号输出关系如表2所示。

图4 换相逻辑模块Fig. 4 Phase change logic module

表2 霍尔信号与开关管触发信号关系Table 2 The relationship between Holzer signal and switch tube trigger signal
3.3 仿真结果与分析
在Matlab/Simulink中,分别对传统PWM调制控制电路与新的控制电路进行仿真,两者仿真均在转速为2 000 r/min条件下进行。传统PWM调制控制电路相电流仿真波形如图5所示,传统PWM调制控制电路电磁转矩仿真波形如图6所示,基于buck控制电路的相电流仿真波形如图7所示,基于buck控制电路的电磁转矩仿真波形如图8所示。
从图5与图6的相电流图可知,加前级buck变换的相电流脉动为25%,无buck变换的相电流脉动为45%,有buck变换的电流脉动更小,由于无刷直流电机的转矩T与相电流成正比例关系,电流脉动小,电磁转矩脉动也小。
从图7与图8的电磁转矩波形图可知,无buck电路的转矩脉动为50%,有buck电路的转矩脉动为24%。由二者比较可知,经过前级加buck调节直流母线电压,实现调速控制的方法能够获得更小的转矩脉动。
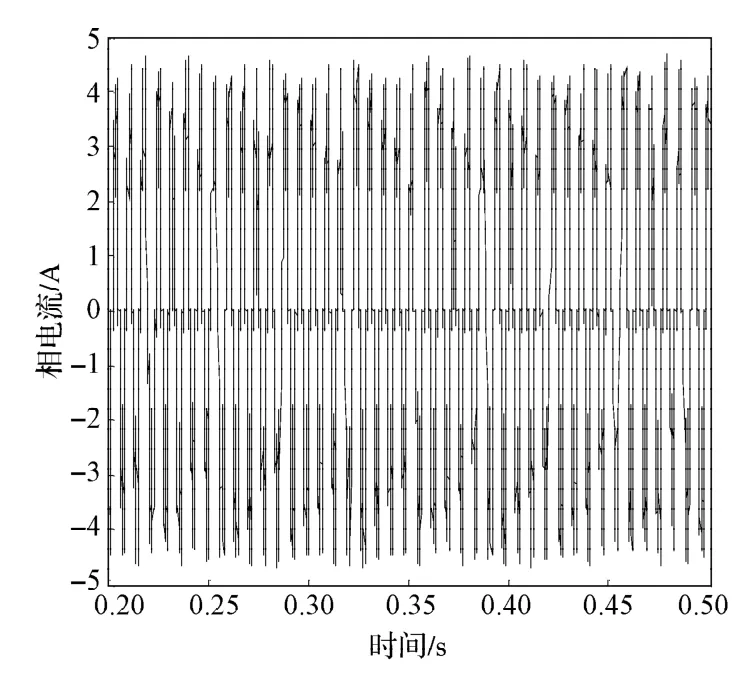
图5 传统控制相电流仿真波形Fig. 5 Phase current similation waveform of traditional control
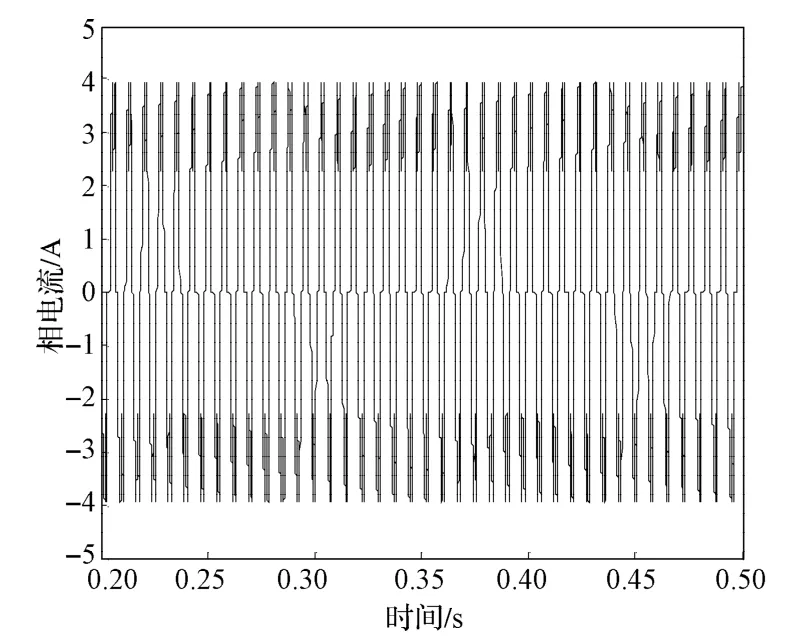
图6 传统控制电磁矩仿真波形Fig. 6 Electromagnetic torque simulation waveform of traditional control
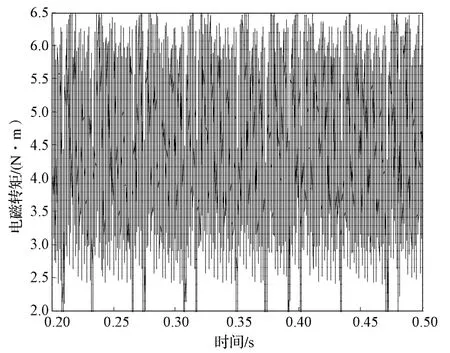
图7 基于buck控制相电流仿真波形Fig. 7 Phase current similation waveform of buck control
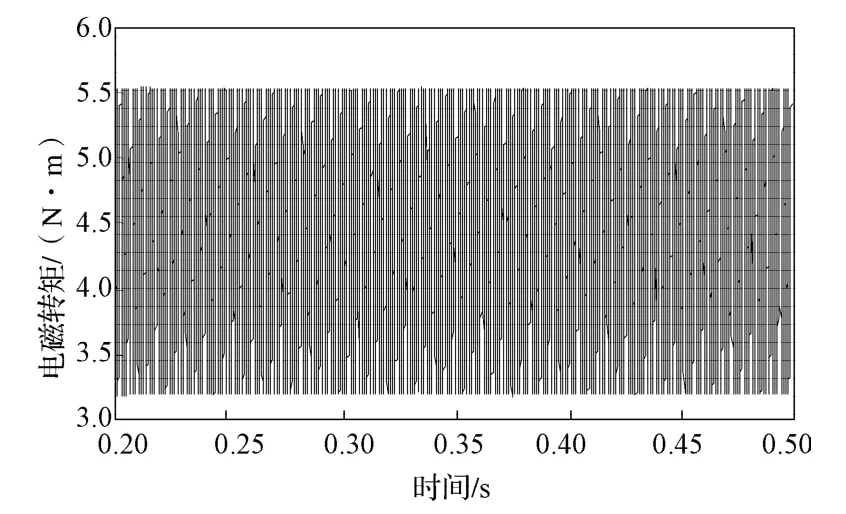
图8 基于buck控制电磁矩仿真波形Fig. 8 Electromagnetic torque simulation waveform of buck control
4 结语
针对无刷直流电机转矩脉动的问题,提出了一种基于buck变换器的电路结构,将三相逆变器的调压功能转移至前级的buck电路中,三相逆变器仅起到换相作用,从而能够有效地抑制无刷直流电机在换相期间与非换相期间的转矩脉动。通过在MATLAB/Simulink环境中作对比仿真,结果表明,该方法能够有效的抑制转矩脉动,为解决无刷直流转矩脉动问题提供了新的思路与方法。
[1]谭建成. 永磁无刷直流电机技术[M]. 北 京:机械工业出版社,2011 :10-15. Tan Jiancheng. Technology of Permanent Magnet Brushless DC Motor[M]. Beijing:Mechanical Industry Press,2011:10-15.
[2]周 杰,侯 燕. 无刷直流电机转矩脉动抑制方法综述[J]. 机电产品开发与创新,2007,20(3):35-37. Zhou Jie,Hou Yan. Review on the Methods of Torque Ripple Attenuation of Brushless DC Motor[J]. Development & Innovation of Machinery & Electrical Products,2007,20(3):35-37.
[3]苗敬利,黄晓光. 抑制无刷直流电机转矩脉动的滑模观测器控制[J]. 科学技术与工程,2013,13(32):33-35. Miao Jingli,Huang Xiaoguang. Inhibition of Brushless DC Motor Torque Ripple of the Sliding Mode Observer Control [J]. Science Technology and Engineering:2013,13(32):33-35.
[4]周美兰,李 志,苏革航. 无刷直流电机PWM调制方式对非换相期间转矩脉动的影响[J]. 哈尔滨理工大学学报,2014,19(6):20-24. Zhou Meilan,Li Zhi,Su Gehang. Effect of Brushless DC Motor PWM Modulation Modes on Non-Commutation Torque Ripple[J]. Journal of Harbin University of Science and Technology,2014,19(6):20-24.
[5]Carlson R,Lajoie M M,Fagundes J C. Analysis of Torque Ripple Due Phase Commutation in Brushless DC Machines[J]. IEEE Trans on Industy Applicaton,1992,14(28):36-39.
[6]齐 蓉,林 辉,陈 明. 无刷直流电机换相转矩脉动分析与抑制[J]. 电机与控制学报,2006,10(3):16-19. Qi Rong,Lin Hui,Chen Ming. Analysis and Attenuation on Commutation Torque Ripples of Brushless DC Motor [J]. Electric Machines and Control,2006,10(3):16-19.
[7]林 平,韦 鲲,张仲超. 新型无刷直流电机换相转矩脉动抑制控制方法[J]. 中国电机工程学报,2006,26(3):15-18. Lin Ping,Wei Kun,Zhang Zhongchao. A Novel Control Scheme to Suppress the Commutation Torque Ripple in BLDCM[J]. Proceedings of the Chinese Society for Electrical Engineering,2006,26(3):15-18.
[8]黄 兆. 无刷直流电机转矩脉动抑制研究[D]. 广州:广东工业大学,2011. Huang Zhao. Torque Ripple Suppression of Brushless DC Motor[D]. Guangzhou:Guangdong University of Technology,2011.
(责任编辑:申 剑)
A Method to Suppress Torque Ripple of Brushless DC Motor
Xie Shaohua,Qu Suichun
(School of Electrical and Information Engineering,Hunan University of Technology,Zhuzhou Hunan 412007,China)
Analyzes comprehensively the torque ripple causes of brushless DC motor, and proposes a new method of adding the first stage DC converter to control torque ripple. By using buck DC converter and adjusting bus voltage of the inverter to suppress the torque ripple, on the basis establishes brushless DC motor model in MATLAB/Simulink and simulates the system. The result indicates that the method suppresses the torque ripple of brushless DC motor effectively.
brushless DC motor;buck;torque ripple;system simulation
TM351
A
1673-9833(2015)05-0051-05
10.3969/j.issn.1673-9833.2015.05.011
2015-08-17
谢少华(1989-),男,湖南衡阳人,湖南工业大学硕士生,主要研究方向为新型电机及其驱动控制,E-mail:1449468450@qq.com
猜你喜欢
大电机技术(2022年5期)2022-11-17
电工技术学报(2022年20期)2022-10-29
电源学报(2022年5期)2022-10-13
汽车实用技术(2022年12期)2022-07-05
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
东北大学学报(自然科学版)(2022年3期)2022-04-01
微电机(2022年1期)2022-03-21
电动工具(2020年2期)2020-04-22
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
